預(yù)測濾波算法在光測跟蹤伺服系統(tǒng)中的應(yīng)用
2010-08-27 07:58:34李興紅閆智武
探測與控制學(xué)報 2010年2期
關(guān)鍵詞:系統(tǒng)
李興紅,謝 斌,閆智武
(成都理工大學(xué)工程技術(shù)學(xué)院,四川樂山 614007)
0 引言
隨著目標(biāo)運動速度的增加和對光測設(shè)備自動化程度要求的提高,對光電跟蹤伺服系統(tǒng)提出了更高的要求。在光電跟蹤系統(tǒng)中,要實現(xiàn)對目標(biāo)的高精度跟蹤,目前所采取的方法是用電視、紅外或其他測量系統(tǒng)提取目標(biāo)偏離視軸中心的脫靶量作為伺服系統(tǒng)的控制信號,實現(xiàn)閉環(huán)控制。但在一般的閉環(huán)控制系統(tǒng)中,提高系統(tǒng)精度、快速性、穩(wěn)定性及抑制噪聲誤差是相互制約的,很難滿足目前伺服系統(tǒng)的全面指標(biāo)。
從國內(nèi)生產(chǎn)的大型光測儀器來看[1],在電視跟蹤伺服領(lǐng)域,目前主要的控制方法還多以經(jīng)典控制方法為主,即多采用速度滯后補償、加速度滯后補償?shù)瓤刂品椒?gòu)成近似復(fù)合控制[2]。但隨著被測目標(biāo)運動速度和加速度的不斷提高,現(xiàn)有的控制方法已逐漸無法滿足控制精度的要求[3]。因此本文在幾種常用的控制算法的基礎(chǔ)上提出以預(yù)測濾波算法應(yīng)用在光測設(shè)備的跟蹤伺服系統(tǒng)中。
1 跟蹤系統(tǒng)提高跟蹤精度常用方法
電視跟蹤伺服系統(tǒng)如圖1所示,它是由輸入信號、電視跟蹤器、位置回路、速度回路校正放大以及力矩電機組成。

圖1 電視跟蹤伺服系統(tǒng)的數(shù)學(xué)仿真圖Fig.1 The emulation chart of TV tracking servo system
其中光電經(jīng)緯儀跟蹤伺服系統(tǒng)是一種典型的單輸入單輸出雙閉環(huán)位置隨動系統(tǒng)。出于穩(wěn)定性的考慮,光電經(jīng)緯儀跟蹤伺服系統(tǒng)常設(shè)計成Ⅰ型系統(tǒng)[4]。
電視跟蹤系統(tǒng)是以電視測量脫靶量的方式來精確確定目標(biāo)位置的。由于跟蹤系統(tǒng)的響應(yīng)速度有限,因此控制系統(tǒng)得到的脫靶量信息將滯后于目標(biāo),在跟蹤快速運動的目標(biāo)時,該滯后量必然影響控制系統(tǒng)的穩(wěn)定性及跟蹤精度,從圖2可以看出滯后量對跟蹤系統(tǒng)的影響。
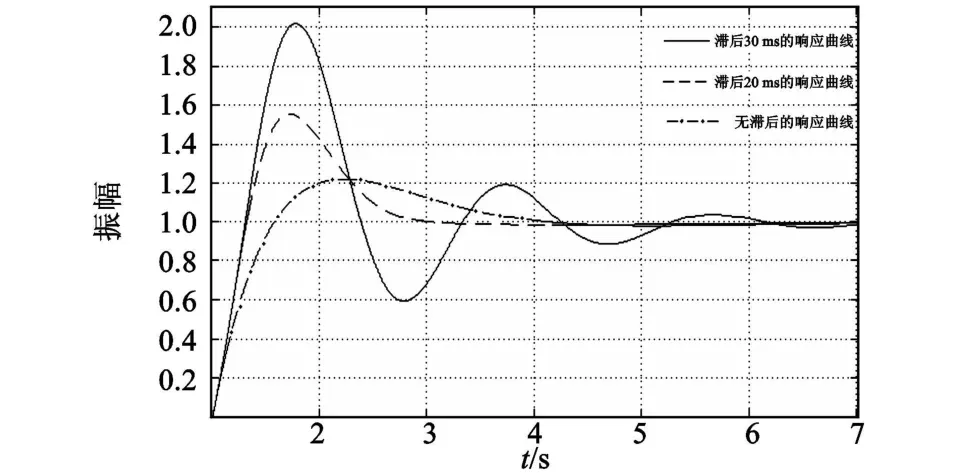
圖2 不加任何補償情況下,脫靶量滯后為0ms,20ms,30ms時,輸入階躍信號時的跟蹤曲線Fig.2 The tracking curve of step signal whenthe error of miss distance dragging is 0ms,20ms,30ms,while having no any compensation
對于同一跟蹤目標(biāo),速度和加速度誤差系數(shù)越大,跟蹤誤差越小。因此,提高系統(tǒng)速度和加速度誤差系數(shù)可以提高跟蹤精度。目前提高系統(tǒng)速度和加速度誤差系數(shù)的常用措施主要有如下幾種。
1.1 帶前饋的復(fù)合控制
引進(jìn)前饋后等效為二階無靜差度系統(tǒng),這樣可以消除速度滯后誤差,同理當(dāng)前饋支路還帶加速度信號時,那么當(dāng)它引進(jìn)后,系統(tǒng)可等效為三階無靜差度系統(tǒng),這樣可以消除加速度滯后誤差。帶前饋的復(fù)合控制框圖如圖3所示。
丹酚酸B預(yù)處理給藥可保護(hù)MI/RI的受損心肌組織,其作用途徑可能與保護(hù)心肌的胞漿膜ATP酶活性、改善心肌的能量代謝等相關(guān)。
1.2 速度滯后補償控制
采用速度滯后補償對系統(tǒng)頻率特性的低頻段頻率幅值有明顯的提高,但不改變中頻段的幅值特性,保證系統(tǒng)有一定的穩(wěn)定裕度,而對速度回路低頻段響應(yīng)并沒有明顯改變,但這種控制方法提高精度有限。帶有速度補償?shù)南到y(tǒng)如圖4所示。
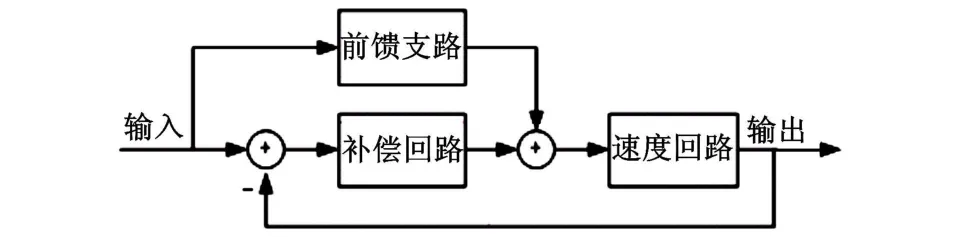
圖3 帶前饋的復(fù)合控制框圖Fig.3 The frame chart of composite control with the feedforward
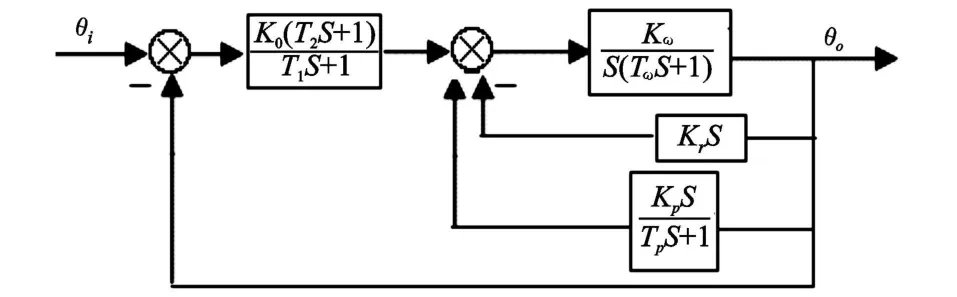
圖4 帶有速度補償?shù)目刂葡到y(tǒng)框圖Fig.4 The f rame chart of speed compensate system
1.3 動態(tài)高型控制
在最初的控制系統(tǒng)基礎(chǔ)上再并入幾個積分環(huán)節(jié),就構(gòu)成高型系統(tǒng)。

圖5 動態(tài)高型控制系統(tǒng)框圖ig.5 The frame chart of dynamic high type control system
但當(dāng)系統(tǒng)的跟蹤誤差較大時加,入積分容易造成積分飽和,從而增大跟蹤誤差甚至造成系統(tǒng)不穩(wěn)定。因此必須利用計算機實時監(jiān)控系統(tǒng)的跟蹤誤差,并根據(jù)系統(tǒng)的跟蹤誤差改變增加的積分,即在跟蹤誤差較大時并入積分環(huán)節(jié),以最快的速度減小誤差,而在跟蹤誤差較小時去掉積分環(huán)節(jié),以防止積分飽和,使系統(tǒng)既能穩(wěn)定又能最大程度的減小跟蹤誤差[5-6]。
2 預(yù)測濾波及在復(fù)合控制系統(tǒng)的應(yīng)用
一般閉環(huán)控制系統(tǒng)中,提高系統(tǒng)精度、快速性、穩(wěn)定性及抑制噪聲誤差是相互制約的,很難滿足目前伺服系統(tǒng)的全面指標(biāo)。復(fù)合控制是提高跟蹤精度的一種有效的方法。構(gòu)成復(fù)合控制系統(tǒng)的關(guān)鍵是得到目標(biāo)的角速度信號,但在電視、紅外等光電跟蹤系統(tǒng)中無法直接得到。如果通過合成法得到的目標(biāo)的方位角和俯仰角,經(jīng)過微分運算求得角速度,那么控制系統(tǒng)通過圖像傳感器得到的運動目標(biāo)的信息都有一定的滯后,該滯后量必然影響控制系統(tǒng)的穩(wěn)定性和跟蹤精度。因此,須進(jìn)行濾波,對目標(biāo)運動參數(shù)濾波估值,在合成目標(biāo)位置信息基礎(chǔ)上用數(shù)字濾波方法算出目標(biāo)精確位置、速度、加速度來構(gòu)成等效的復(fù)合控制,提高跟蹤精度,改善跟蹤控制系統(tǒng)性能。
現(xiàn)代濾波器是采用數(shù)字計算的方法,從觀測數(shù)據(jù)中濾掉隨機干擾,取出有用信號的計算裝置。實際上它是一套觀測數(shù)據(jù)的計算程序。在濾波中,所依據(jù)的觀測數(shù)據(jù)是有限的,根據(jù)這些觀測數(shù)據(jù),不可能完全消除隨機誤差,一般只能根據(jù)一定的準(zhǔn)則來估計它。對于某一狀態(tài)的估計可分為平滑濾波器和預(yù)測濾波器等,而常用的濾波技術(shù)有:最小二乘濾波、最小方差濾波、KALMAN濾波等,在此采用KALMAN預(yù)測濾波應(yīng)用到光電系統(tǒng)當(dāng)中。
如何將儀器的位置信號和電視跟蹤器所產(chǎn)生的脫靶量信號合成被跟蹤目標(biāo)的位置信息是進(jìn)行預(yù)測濾波的關(guān)鍵[7]。
現(xiàn)用ak,ek分別表示第K個采樣周期視軸中心的方位角和俯仰角,用AK,EK分別表示第K個采樣周期目標(biāo)的方位角和俯仰角,則:ΔAK=AK-ak,ΔEK=EK-ek分別表示第K個采樣周期目標(biāo)關(guān)于這兩個角度的偏差。RK為目標(biāo)距離,Δx k和Δyk分別為目標(biāo)方位角和俯仰角的脫靶量。跟蹤目標(biāo)位置合成示意圖如圖6所示。
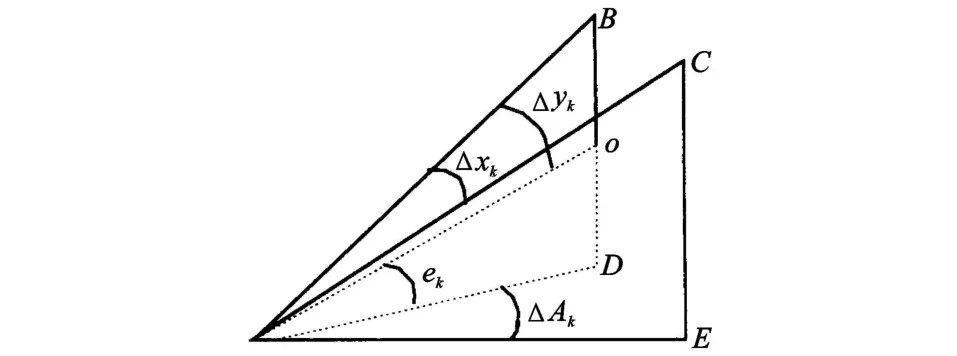
圖6 跟蹤目標(biāo)位置合成示意圖Fig.6 The position composed figure of the tracking target
圖6 中C表示目標(biāo)位置,B與C俯仰角相同而方位角相差ΔAK的一點,D、E分別是B、C在XY平面上的投影。O表示位于B、D連線上且方位角和俯仰角為視軸中心位置的一點。求得B、C、D、E的坐標(biāo)分別為:
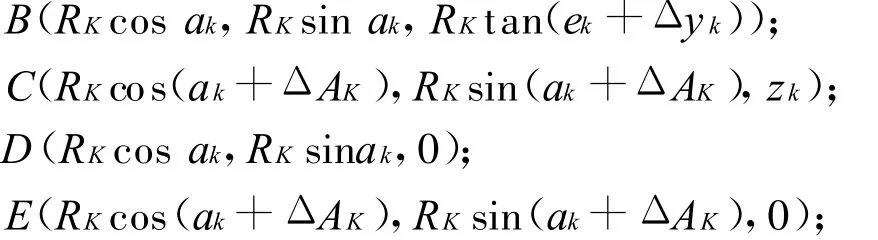
式中,zk表示第K個采樣周期目標(biāo)的高度。又由圖6可知:EK=ek+Δy k=ek+ΔEK;

整理:

因此:

因此目標(biāo)位置為:

那么由目標(biāo)的位置信息預(yù)測得到目標(biāo)速度信息如圖7所示。其中AK、BK為預(yù)測得到的目標(biāo)位置,VAK、V BK為預(yù)測得到的目標(biāo)運動速度。
因此利用經(jīng)緯儀中編碼器的位置信號與脫靶量合成目標(biāo)位置,并通過預(yù)測濾波技術(shù)得到目標(biāo)的速度信息,從而構(gòu)成等效復(fù)合控制系統(tǒng)圖如圖8所示,其中GKF(S)為目標(biāo)位置合成,GVF(S)為濾波器模型。
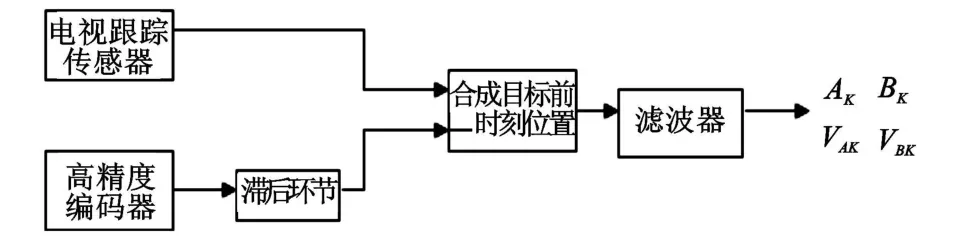
圖7 預(yù)測濾波示意圖Fig.7 Thefigure of the predictive filter
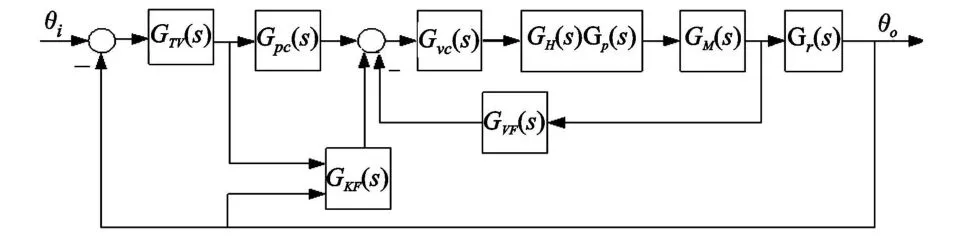
圖8 等效復(fù)合控制系統(tǒng)框圖Fig.8 The f rame chart of the equivalent system
3 在電視跟蹤系統(tǒng)中的MATLAB仿真
首先建立光電經(jīng)緯儀電視跟蹤系統(tǒng)的仿真模型,對應(yīng)于保精度角速度 50°/s和角加速度35°/s2時等效的正弦信號為θ(t)=71.2sin(0.7t),將模型在MATLAB軟件中加以仿真。
針對電視跟蹤伺服系統(tǒng),相應(yīng)地將無補償情況、引入圖4的速度滯后補償及引入圖8的預(yù)測濾波兩種不同的方法提高跟蹤精度的情況分別加以仿真,綜合仿真結(jié)果如圖9和圖10。
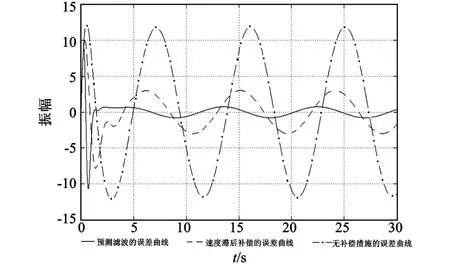
圖9 預(yù)測濾波控制得到系統(tǒng)的最大跟蹤誤差曲線Fig.9 The tracking error curve of predictive filter method
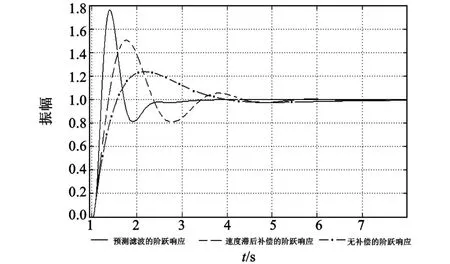
圖10 速度預(yù)測控制方法對動態(tài)性能的影響曲線Fig.10 The curve of predictive filter method for the dynamic performance
MATLAB仿真結(jié)果表明:應(yīng)用預(yù)測濾波可以明顯地提高光電經(jīng)緯儀電視跟蹤系統(tǒng)的跟蹤精度,但同時系統(tǒng)的超調(diào)量較大,振蕩次數(shù)增多。由于一般的電視跟蹤的視場較小,如超調(diào)過大容易造成跟蹤丟失,因此該方法不能用于捕獲的最初階段,而適用于穩(wěn)定跟蹤階段。即先采用速度滯后補償?shù)姆椒ǖ椒€(wěn)定地跟蹤到目標(biāo),然后切換到采用預(yù)測濾波的系統(tǒng)中,實現(xiàn)穩(wěn)定的高精度。跟蹤切換過程仿真如圖11。
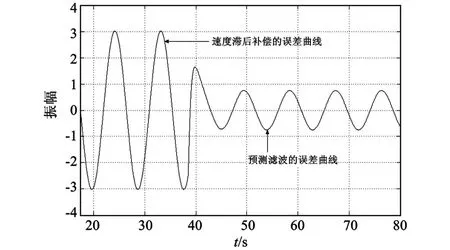
圖11 由速度滯后加入切換預(yù)測濾波示意圖Fig.11 The curve of from the speed lag to the predictive filter method
4 在電視跟蹤系統(tǒng)中的實際測量
實際測量中使用測量電視對光學(xué)動態(tài)靶標(biāo)進(jìn)行跟蹤,即:首先將目標(biāo)捕捉到視場中,將跟蹤方式切換到測量電視,然后旋轉(zhuǎn)靶標(biāo),并記錄跟蹤誤差。
采用KALMAN預(yù)測濾波[8],同時用C語言編寫的濾波模塊作為程序的子函數(shù)加到主程序中完成預(yù)測濾波并構(gòu)成等效復(fù)合控制。
以光電經(jīng)緯儀的方位控制系統(tǒng)為例,分別對不加任何補償方法、采用速度滯后補償方法、采用速度預(yù)測濾波方法跟蹤靶標(biāo)運動得到的跟蹤誤差曲線加以對比。
由圖12可以看出,當(dāng)靶標(biāo)運動周期為4.5 s時,對于捕獲電視:無補償措施的跟蹤精度為23′,采用速度滯后補償?shù)母櫨葹?4′,而采用預(yù)測濾波的跟蹤精度為8′,比無補償措施的跟蹤精度提高2.87倍。
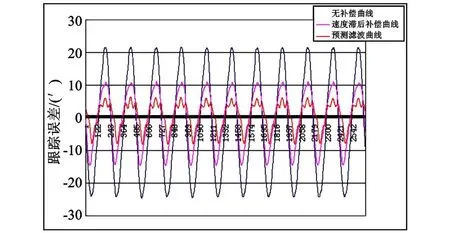
圖12 靶標(biāo)運動周期為4.5 s時捕獲電視的跟蹤誤差曲線Fig.12 The curve of tracking error when the drone period is 4.5 s for the capturing TV
由圖13可以看出,當(dāng)靶標(biāo)運動周期為4.5 s時,對于紅外電視:采用速度滯后補償?shù)母櫨葹?′,而采用預(yù)測濾波的跟蹤精度為2.5′,比無補償措施的跟蹤精度提高2倍。
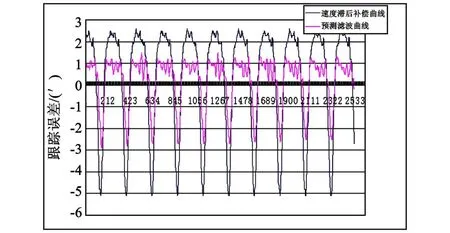
圖13 靶標(biāo)運動周期為4.5 s時紅外電視的跟蹤誤差曲線Fig.13 The curve of tracking error when the drone period is 4.5 s for theinfrared TV
5 結(jié)論
由實際測量結(jié)果分析可見:采用預(yù)測濾波方法的跟蹤精度要明顯地高于采用速度滯后補償方法的跟蹤精度。其中紅外電視跟蹤時,由于紅外電視跟蹤系統(tǒng)的帶寬比捕獲電視跟蹤系統(tǒng)的帶寬高,因此會有一些高頻成分進(jìn)入到系統(tǒng)中,造成誤差曲線的輕微抖動;而其跟蹤誤差曲線的不對稱是由于當(dāng)靶標(biāo)的運動到高角時,對應(yīng)的方位的角速度最大,同時還有角加速度的影響,使得跟蹤的誤差值變大并明顯大于低角時的誤差值。
[1]馬佳光,尹義林.778光電經(jīng)緯儀跟蹤控制系統(tǒng)[J].光學(xué)工程,1986(1):50-59.MA Jiaguang,YIN Yilin.The tracking control system of 778 theodolite[J].Optical Engineering,1986(1):50-59.
[2]馬佳光.復(fù)合控制及等效復(fù)合控制原理及其應(yīng)用[J].光學(xué)工程,1988(5):1-16.MA Jiaguang.Principle and application of the complex control and the equivalent complex control[J].Optical Engineering,1988(5):1-16.
[3]陳娟,郭勁.現(xiàn)代靶場光電測量工程的發(fā)展現(xiàn)狀[J].光機電信息,2002(1):22-27.CHEN Juan,GUO Jin.The development situation of the optical measure engineering for proving ground[J].OME information,2002(1):22-27.
[4]馬佳光.電視跟蹤系統(tǒng)的計算機仿真分析[J].光學(xué)工程,1983(3):40-50.MA Jiaguang.The emulation analysis of computer for TV tracking system[J].Optical Engineering,1983(3):40-50.
[5]馬佳光.預(yù)測目標(biāo)角速度的最小平方濾波器[J].光學(xué)工程,1988(5):46-54.MA Jiaguang.The min square filter of predicting the angle speed for target[J].Optical Engineering,1988(5):46-54.
[6]王建立.提高光電經(jīng)緯儀跟蹤快速運動目標(biāo)能力的一種方法[J].光電工程,2002(1):34-37.WANG Jianli.A method of improve tracking the moving target for theodolite[J].Optical Engineering,2002(1):34-37.
[7]王毅,魏忠和.補償伺服系統(tǒng)速度誤差和加速度誤差的方法[J].光學(xué)精密機械,1978:13-20.WANG Yi,WEI Zhonghe.A method of speed error and acceleration error for complement servo system[J].Optics and Precision Engineering,1978:13-20.
[8]宋文堯,張牙.卡爾曼濾波[M].北京:科學(xué)出版社.1991.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
