公交車制動能量再生系統電控單元的設計
2010-08-29 13:28:02張小東曲金玉張益瑞梁力艷
山東理工大學學報(自然科學版) 2010年4期
張小東,曲金玉,張益瑞,梁力艷
(山東理工大學交通與車輛工程學院,山東 淄博 255049)
隨著汽車工業的迅猛發展,燃油緊缺、環境污染成為目前世界上亟待解決的突出問題,各國都在研究減少燃油消耗和降低排放的汽車環保節能技術,其中再生制動能量回收技術是有效手段之一.公交車主要運行在城市道路中,行車速度慢,并且頻繁處于起步、制動和怠速狀態,導致傳統的內燃機客車的油耗大,排放高,是城市污染的重要源頭.提高公交車的能量利用率具有十分重要的社會效益和經濟效益.以電能方式儲存制動能量的制動能量回收系統通過電機回收/再生制動能量,該方式是目前研究的主要方向,但其主要應用對象為電動汽車[1-2].并聯式液壓制動能量再生系統與公交車原有機械式動力傳動系統并行聯接,通過對公交車較少的改動即可實現公交車制動能量的回收和再生,從而提高車輛能量利用率,達到公交車節能減排的目的.研究表明,安裝并聯式液壓制動能量再生系統后節油率達到20%,各種其他排放指標下降20%~50%,效果顯著[3-4].
1 液壓式制動能量再生系統構成
液壓式制動能量再生系統由液壓蓄能器、液壓油路控制單元、變量液壓泵/馬達、電磁離合器、變速箱和電子控制單元構成,控制系統結構如圖1所示.其中,變速箱實現液壓制動能量再生系統與公交車動力傳動系統的并行聯接;電磁離合器連接變量液壓泵/馬達與變速箱,通過電磁離合器的通電/斷電實現并聯式液壓制動能量再生系統與公交車動力的傳遞/斷開;變量液壓泵/馬達是系統的能量轉化元件,實現機械能與液壓能之間的雙向轉換;液壓蓄能器儲存高壓液壓油是系統的儲能元件;液壓油路控制單元由多個電磁換向閥和管路組成;電子控制單元通過各種傳感器識別駕駛員的意圖和車輛的工作狀態、調整各執行器的控制參數,并驅動各種執行器[5].
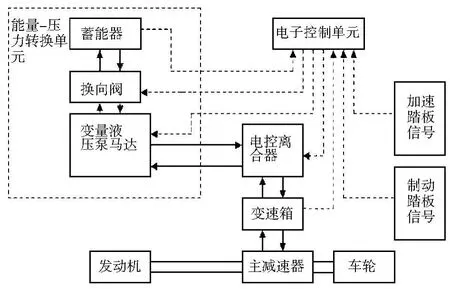
圖1 液壓式制動能量回收系統結構原理圖
2 電子控制系統的組成
并聯式液壓制動能量再生系統電子控制系統如圖2所示.電子控制單元分為電源模塊、輸入信號調理模塊、輸出信號調理模塊和微處理器.
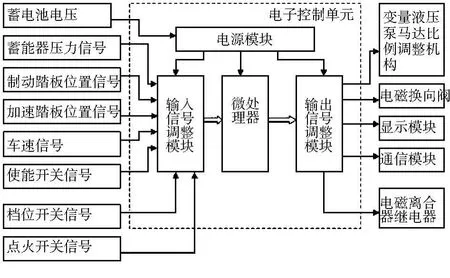
圖2 電子控制系統結構原理圖
電子控制單元的輸入信號有點火開關信號、使能開關信號、蓄電池電壓信號、蓄能器壓力信號、制動踏板位置信號、加速踏板位置信號等.輸入信號反映了駕駛員的操作意圖和公交車的運行狀態,微處理器根據輸入信號識別液壓式制動能量再生系統的工作模式.
輸出信號為電磁離合器繼電器控制信號、電磁換向閥控制信號、變量液壓泵馬達排量比例調節機構的調整電流,通過對繼電器、電磁閥以及泵/馬達的驅動控制,實現對液壓制動能量再生系統工作狀態的調節.在微控制器的控制下實現并聯式制動能量再生系統與公交車原動力傳動系統的協同工作,實現駕駛員的操作意圖.
顯示模塊用來指示系統的工作狀態,包括電源指示燈、報警指示燈、蓄能器儲能狀態指示燈和系統工作狀態指示燈.通信模塊通過SPI總線實現微控制器與擴展芯片的通信,UART接口電路實現控制系統與上位機的通信.
2.1 主控芯片選擇
本系統采用美國Silab的高速混合信號ISP FLASH微控制器C8051F005作為本系統的微處理器.該微控制器特點如下[6]:(1)高速、流水線結構的8051兼容的CIP-51內核(可達25MIPS);(2)8通道12位的片上SAR ADC,可編程轉換速率,最大100kbps,可編程放大器增益;(3)2304字節內部數據RAM,64K字節FLASH存儲器,可以在系統編程;(4)4個通用16位計數器、定時器陣列,硬件SMBus、SPI及兩個UART串口;(5)5個16位捕捉/比較模塊和一個專用16位定時計數器,可方便的實現PWM輸出和脈寬的測定,只需要較少的CPU干預.
2.2 電源電路設計
電子控制單元中微處理器C8051F005使用2.7~3.3V供電電源,變量液壓泵馬達排量比例調整機構的驅動電壓為24V,驅動電流為200~600mA;輸入信號調理模塊和輸出信號調理模塊需要5V電壓.電子控制單元對電源模塊的要求復雜,同時,作為車載控制電路要求對抗干擾性有很高的要求.英飛凌公司的LT3437是能夠在3.3~60V寬輸入電壓范圍內獲得高效率的降壓式開關穩壓器,可以滿足要求苛刻的汽車環境的要求[7].本設計中使用LT3437實現蓄電池24V電壓到5V電壓的轉換;由低壓差穩壓芯片AS1117構成5V~3.3V的電源供電電路.為保證微控制器C8051F005的工作穩定性,設計了專門的供電電路提供數字電壓+3VD1和模擬電壓AV+,供外部擴展電路使用的3V電壓由+3VD2提供.電路如圖3所示.
2.3 MOS管驅動電路設計
系統輸出的開關量有控制電磁離合器結合/分離、控制電磁換向閥保壓、回收和再生動作、強制卸壓溢流閥的打開和關閉,功率驅動使用超效應管實現接通和關斷電路.功率場效應管驅動芯片采用凌特公司的T LE6230 GP,其具備足夠大的驅動功率同時還可以通過SPI總線接口完成輸出控制功能和診斷功能,從而分辨對每路輸出進行控制、實時故障檢測;還可以獲得每路輸出狀態的信息:正常運行、過載、對地短接和負載開路等[8].電路設計如圖4所示.
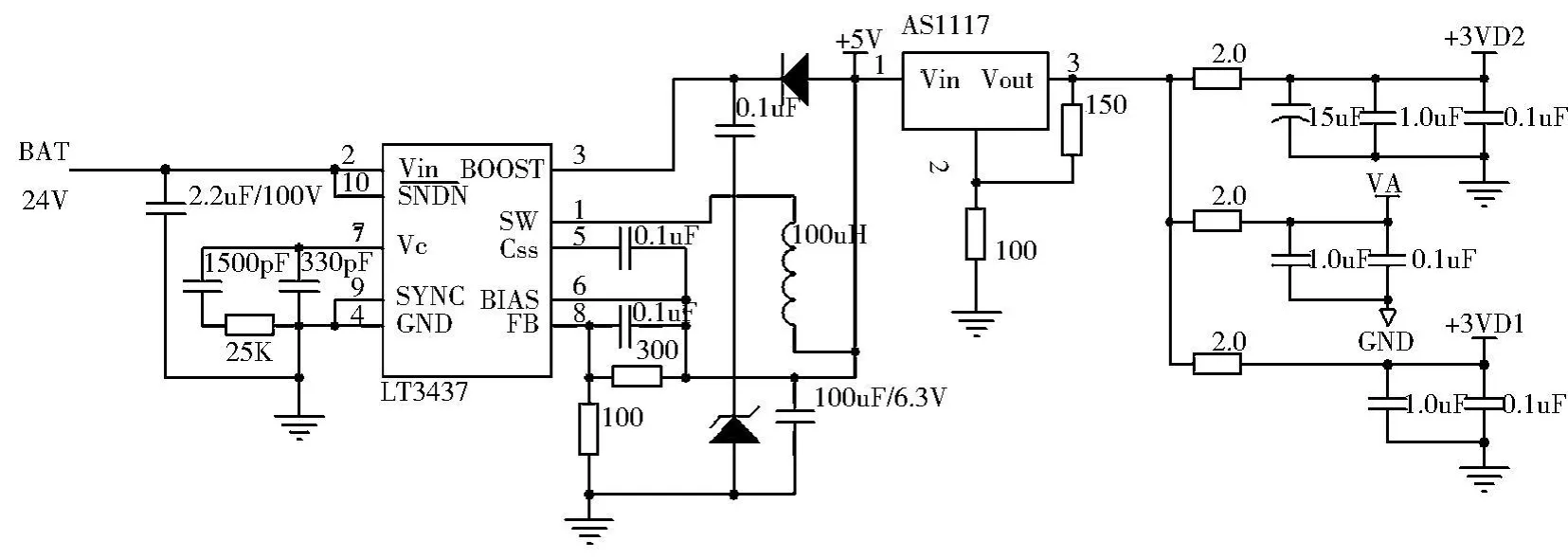
圖3 電子控制系統電源電路
2.4 變量液壓泵馬達有效排量驅動電路的設計
變量液壓泵馬達排量調整用比例電磁鐵實現,比例電磁鐵調整方式分模擬調整方式和PWM調整方式兩種.其中,模擬調整方式特點是電流控制精確,缺點是持續供電消耗能量大,抗干擾能力差.PWM調整方式使功率MOS工作在開關狀態,能量消耗小,本系統的驅動方式采用PWM控制方式.該電路采用飛思卡爾公司生產的全橋驅動芯片33486 A配合微控制器輸出的PWM信號輸出驅動電流范圍為200~600mA.該芯片具有驅動功率大的特點同時還可以通過ST端指示過熱、過電流故障的功能,并且在系統不工作的保壓狀態時通過WAKE端置低電平可使驅動電路處于低功耗的睡眠狀態或者正常工作狀態[9].在Cur_R端可復制芯片的驅動電流,接3歐姆的下拉電阻實現電流-電壓的轉換,通過微處理器的AD采樣控制程序修正PWM的脈寬,驅動電路原理圖如圖5所示.
3 電子控制系統程序設計
系統控制單元的控制程序采用C語言編寫.從功能上分為主程序模塊、制動能量回收子程序模塊和制動能量再生子程序模塊以及顯示和數據采集等子程序,本文將介紹主程序調度模塊、制動能量回收子程序模塊和制動能量再生子程序模塊.
主程序工作流程圖如圖6所示.主程序調度模塊的主要功能為系統上電時初始化微處理器各特殊功能寄存器使系統處于待工作狀態,初始化輸出信號端口使液壓式制動能量回收系統處于正常的工作狀態,若檢測到系統初始化不正常,產生報警.若系統初始化正常則打開中斷并啟動定時器T4,此時,主程序進入循環狀態循環檢測系統的工作狀態.定時器T4依次觸發掃描子程序、顯示子程序和串口通訊子程序.當掃描子程序時間到時,單片機通過AIN0、AIN1和AIN2端口采集蓄能器壓力信號、加速踏板位置信號和制動踏板位置信號,并根據信號的數值修改控制系統工作的狀態標志位:保壓、制動能量回收和制動能能量釋放.顯示子程序時間到達時,系統運行顯示子程序指示蓄能器壓力儲存狀態和系統工作狀態.串口通訊子程序時間到達時,通過UART0與上位機通訊.主程序在循環部分通過判斷系統工作狀態標志位進入制動能量回收子程序模塊、制動能量再生模塊.

圖4 電子控制單元開關量輸出驅動電路
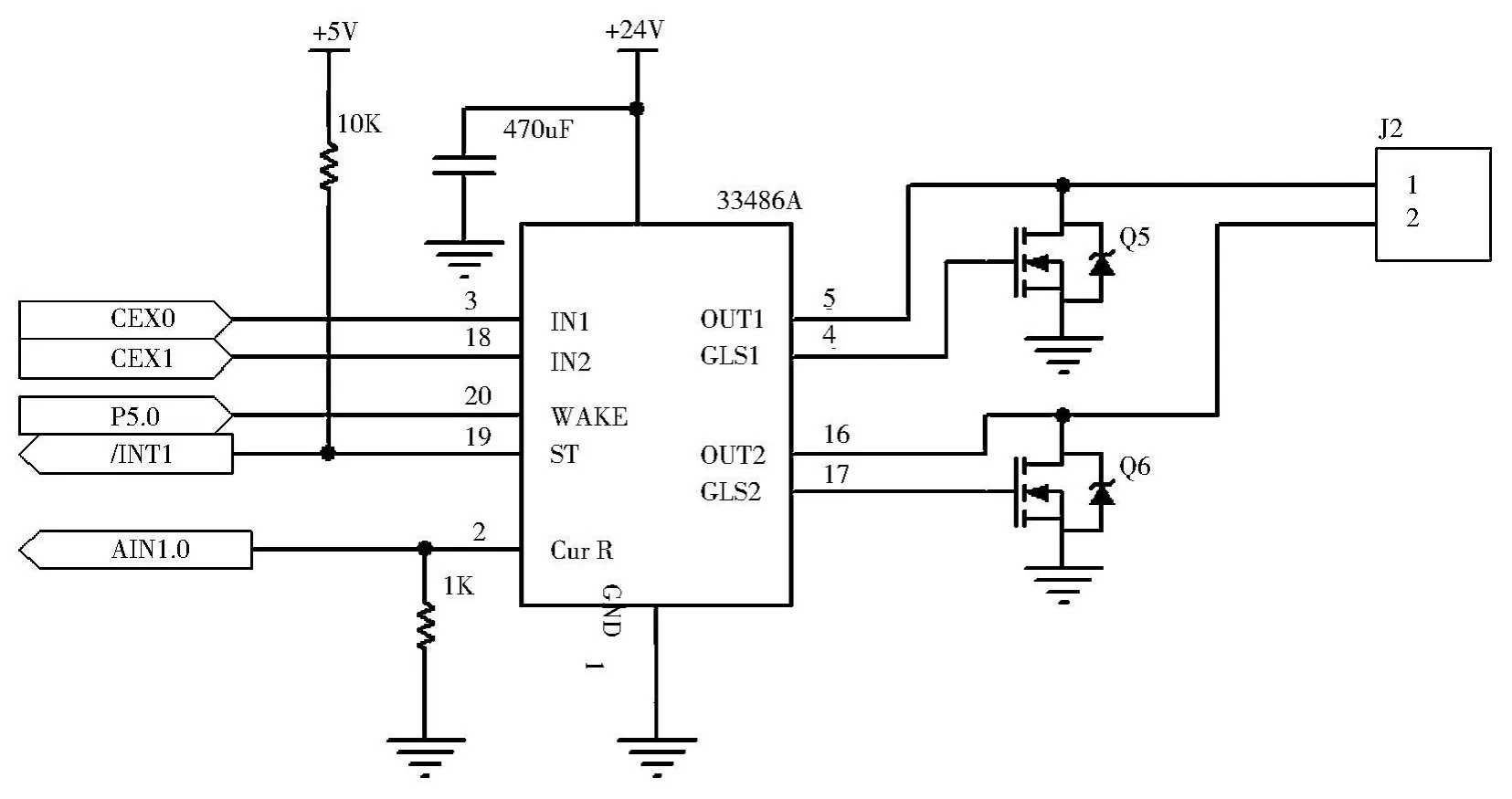
圖5 變量液壓馬達調整電流驅動電路
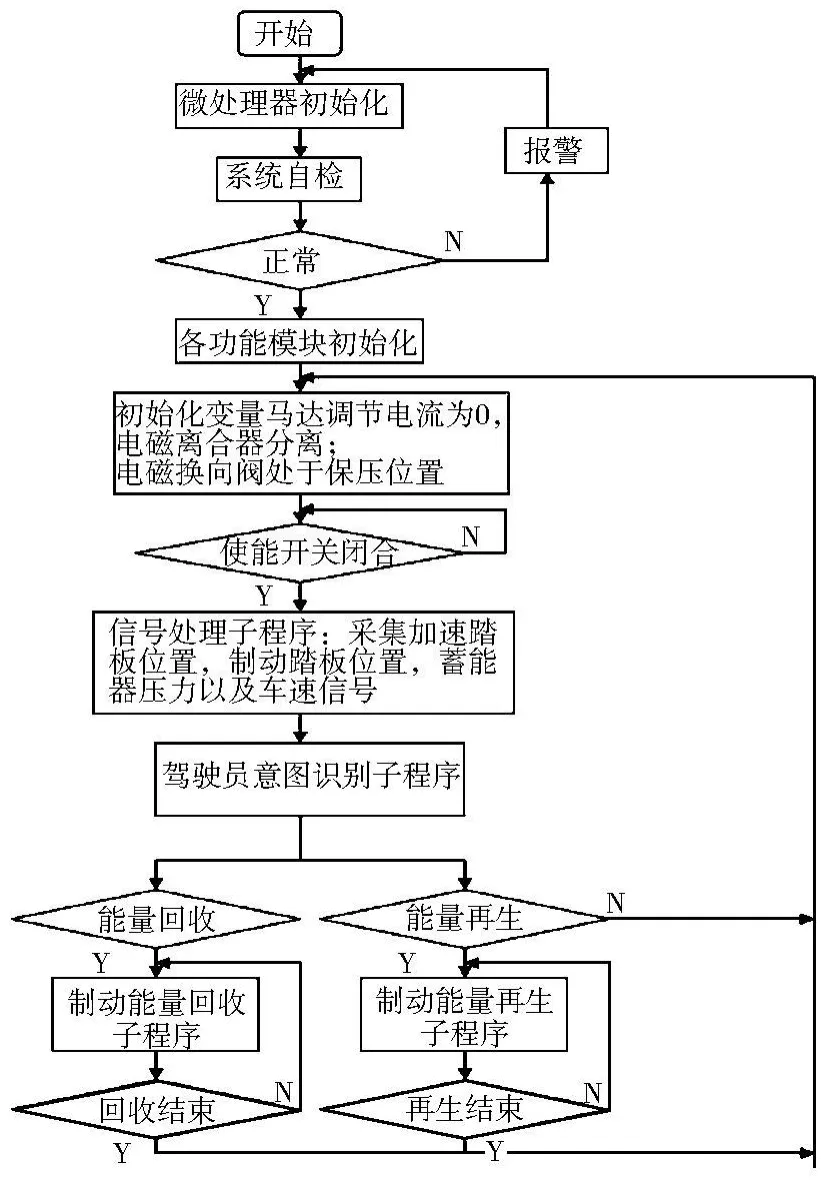
圖6 主程序流程圖
4 結束語
本文著重介紹了液壓式制動能量再生系統的電子控制系統的輸出信號驅動電路和電源電路.電子控制單元使用了滿足汽車復雜工作環境要求的功率驅動集成電路T LE6230 GP和33486 A,大大提高了系統輸出信號的反應速度和抗干擾性能.經過試驗檢驗系統的反應速度和控制性能均滿足要求.
[1]王軍,熊冉,楊振遷.純電動大客車制動能量回收系統控制策略研究[J].汽車工程,2009,31(10):932-937.
[2]楊寅,熊鵬,陳統卓,等.基于超級電容的電動車制動能量回收技術研究[J].電子技術應用,2009(3):73-76.
[3]彭玲玲.能量回收系統在城市公共汽車上的應用[J].能源研究與信息,2008,24(3):152-155.
[4]彭婕.嘉捷博大首推液壓混合動力公交車[J].城市車輛,2008(3):18.
[5]曲金玉,李鳴,任傳波,等.公共汽車制動能量再生系統控制器的設計[J].山東理工大學學報(自然科學版),2006,20(3):99-102.
[6]童長飛.C8051F系列單片機開發與C語言編程[M].北京:北京航空航天大學出版社,2005:416-419.
[7]Linear Technology Corporation.Data Sheet LT 3437[EB/O L].[2010-01-08].http://pdf1.alldatasheet.com/datasheet-pdf/view/109754/LINER/LT3437.html.
[8]Infineon Technologies AG.Data Sheet T LE6230GP[EB/O L].(2002-10-26)[2010-1-8].http://pdf1.alldatasheet.com/datasheet-pdf/view/80189/INFINEON/T LE6230GP.html.
[9]Freescale Semiconductor Inc..Data Sheet 33486A[EB/OL].(2005-12)[2010-1-8].http://pdf1.alldatasheet.com/datasheet-pdf/view/187704/FREESCALE/33486A.html.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25