水下航行器縱向運動的非線性自適應反演控制*
2010-09-20 09:27:30張寧
彈箭與制導學報 2010年4期
張 寧
(西北工業大學航海學院,西安 710072)
0 引言
水下航行器的空間運動模型具有多變量、高度非線性、強耦合等特點,其流體動力學參數很難精確測得,要求控制系統必須具有一定的魯棒性和自適應能力[1]。滑模控制是提高水下航行器控制系統魯棒性的重要方法,但在未知參數的情況下,滑模控制需要施加較大的控制輸入以克服參數不確定性,對舵機的動態性能有較高要求。
反演設計方法是一種基于Lyapunov穩定性理論的非線性控制遞推設計方法[2],針對具有嚴格反饋形式的非線性系統,從系統的輸出向控制輸入“反演”,得到一系列系統化的反饋控制律和相應的Lyapunov函數,實現系統的全局漸近穩定控制。針對含有參數不確定性的系統,通過引入參數自適應機制,在線估計未知參數,構成自適應反演控制,保證了控制的穩定性和對未知參數的自適應性。
文中針對水下航行器縱向運動控制中的參數不確定問題,采用自適應反演設計方法,在線估計未知參數,理論分析和仿真研究驗證了該控制器的穩定性和自適應性。
1 水下航行器縱向運動模型
水下航行器縱向運動三階非線性運動模型[3]可以表示為:
其中:z為水下航行器的航行深度,u為前向速度,w為垂向速度,θ為俯仰角,q為俯仰角速度,Iy為繞y軸的轉動慣量,M˙q<0為流體附加轉動慣量,Mqq<0為流體二次阻尼系數,Mδ為水平舵的俯仰力矩系數,G為重力,xG為重心到載體坐標系原點的距離。
對模型(1)作如下假設:
假設1:狀態變量z、θ、q及u、w均可以測量,并且考慮到u和w 的慢變特性,假定˙u=˙w=0。
假設2:u cosθ+w sinθ>0。
一般情況下,對于巡航式水下航行器有u?w,θ為一小角,假設2是成立的。
將式(1)中的第3式寫為標準形式:
2 自適應反演縱向運動控制器設計
縱向運動控制的目標是:給定常值參考深度信號zd,設計跟蹤控制器,使深度跟蹤誤差z-zd漸近收斂到零,并對俯仰角動態特性中的未知模型參數具有自適應性。
定義新的狀態變量{z1,z2,z3}:
于是方程(1)轉換為:
首先定義深度跟蹤誤差:

zd為常值深度指令,有:

以z2為虛擬控制量,由定義(3)顯然有考慮到速度的有界性,其參考軌跡即鎮定函數必須具有飽和特性,滿足z2的幅值限制[4],這里取:

其中,λ1>0、1≥μ>0為設計參數。定義跟蹤誤差:

為了使深度跟蹤誤差e1在后面的反演設計過程中的交叉項影響是有界的,避免對控制輸入產生較大的影響,定義Lyapunov函數:


其中,λ2>0為設計參數。定義跟蹤誤差e3=z3-α2,代入式(13)有:

其中,W2(e1,e2)=W1(e1)+λ2e22≥0,正定。
定義第三個Lyapunov函數:

以z3為虛擬控制,取鎮定函數:
其導數為:
考慮到參數γ、α、β、κ的不確定性,取控制輸入:




其導數為:
為消除參數估計誤差對系統穩定性的影響,設計如下自適應律:
其中,ζ1、ζ2、ζ3、ζ4為自適應參數。代入式(21)得到:

由于V4≥0,信號均有界,根據Barbalat引理,有:
于是得到下面的結論:
定理:在控制器式(18)和自適應律式(22)的作用下,由式(3)描述的水下航行器縱向運動的深度跟蹤誤差全局漸近收斂到零,且對未知模型參數具有自適應性。
3 仿真研究
為驗證文中提出的自適應反演控制器式(18)和式(22)的有效性,采用REMUS水下航行器的衡重參數和流體力學參數[5]進行數學仿真研究。控制參數和自適應參數為:

初始深度為0m,深度指令為20m。仿真結果如圖1~圖2所示。
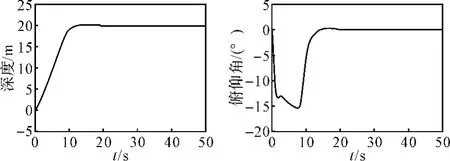
圖1 深度仿真曲線 圖2 俯仰角仿真曲線
從仿真結果可以看出,深度跟蹤誤差收斂到零,控制性能良好,并且對未知參數具有自適應性。
4 總結
文中研究了動力學參數不確定情況下的水下航行器縱向運動控制問題,基于自適應反演方法設計出深度跟蹤控制器,考慮了深度變化率的幅值限制,選擇具有飽和特性的鎮定函數。理論分析和仿真結果均表明,該控制器保證了深度跟蹤的全局漸近穩定性,并具有參數自適應能力。該設計方法還可應用于水下航行器的定角爬潛和航向控制器的設計中。
[1]徐德民.魚雷自動控制系統[M].2版.西安:西北工業大學出版社,2001.
[2]M Krstic,I Kanellakopoulos,P V Kokotovic.Nonlinear and adaptive control design[M].New York:John Wiley Inc,1995.
[3]Thor I Fossen.Marine control systems[M].Trondheim,Norway:Marine Cybernetics,2002.
[4]Khoi B Ngo,Robert Mahony,Zhong-Ping Jiang.Integrator backstepping design for motion system with velocity constraint[C]//Proceedings of the 5th Asian Control Conference,2004:141-146.
[5]Timothy Prestero.Verification of a six-degree of freedom simulation model for the REMUS autonomous underwater vehicle[D].MIT/WHOI Joint Program in O-ceanographic Engineering,2001.
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東青年(2016年1期)2016-02-28 14:25:25
當代修辭學(2014年3期)2014-01-21 02:30:44
公務員文萃(2013年5期)2013-03-11 16:08:37