具有模糊搶修時間的震后道路搶修排程研究
2010-10-21 06:25:22霍建順李愛慶
統(tǒng)計與決策 2010年4期
霍建順,薛 梅,李愛慶
(西南交通大學 經(jīng)濟管理學院,成都 610031)
0 引言
強震對于交通網(wǎng)絡的影響非常巨大,會造成地面塌陷、龜裂,山體滑坡掩埋道路,橋梁的垮塌等等,這些都使得救援工作受阻。在5.12汶川地震中,多次由于道路受阻使得對汶川救援工作進展緩慢。由于地形復雜,強余震不斷、惡劣天氣、次生災害等,又使得道路搶修工作進行地極為艱難。再者震后應急期,緊急救援資源(營救設備、營救車輛、救護車和相關營救人員、通訊電力搶修人員等)通常都很有限,因而如何最有效地利用這些有限的資源,盡快地將道路搶通變得非常重要。實際中,應急階段對道路搶修的排程計劃通常根據(jù)決策者的經(jīng)驗進行安排,沒有考慮整個系統(tǒng)的目標,所做方案在理論上只是可行解,在實際運作時這些方案的實施效果可能會非常差。目前對震后道路災點的搶修排程問題,國內(nèi)外學者有了一定的研究。Cheng-Min Feng[1]將應急期界定為災后的72小時,并對高速公路的道路災點搶修排程進行了研究。Hitoshi FURUTA et al[2]則考慮了震后不確定性環(huán)境,如:余震,火災,天氣等因素,應用遺傳算法得到一個具有魯棒性的道路恢復排程的決策支持系統(tǒng)。Shangyao Yan et al[3,4]提出一種時空網(wǎng)絡模型來解決震后道路搶修排程的模型,并進一步地結(jié)合賑災物流情形進行討論。
本文考慮到強震后情況的復雜性,道路搶修不確定性很高,擬將道路災點的搶修時間設為三角模糊變量,使道路災點搶通時間滿足一定的置信度水平,并用機會約束規(guī)劃建構(gòu)數(shù)學模型,針對5.12地震后四川省什邡市的道路災點數(shù)據(jù)進行求解,并進行分析。
1 模型及算法
機會約束規(guī)劃是由Charnes和cooper提出的第二類隨機規(guī)劃,其顯著特點是約束條件至少以一定的置信水平成立。Baoding Liu et al[5,6]提出了模糊的機會約束規(guī)劃,并在文獻[7]中針對模糊決策系統(tǒng)構(gòu)建了minmax的機會約束模型。Yongshuang Zheng et al[8]針對旅行時間為模糊變量的車輛路徑問題構(gòu)建了一個機會約束規(guī)劃的模型,在有時間窗的情形下,最小化行駛距離,并設計了一種混合算法來求解此模糊車輛路徑問題。張建勇等[9]通過引入決策者主觀偏好值的概念,建立具有模糊特征的車輛路徑問題的模糊機會規(guī)劃模型,并設計了混合遺傳算法,在最小化總行駛距離的目標下進行了求解。
在強震應急期,政府交通主管部門根據(jù)收集到的道路受損情況,派出搶修工作隊進行道路搶修,對道路災點搶通的界定為至少有一條車道可通過即可。根據(jù)實際情況,本文對有關情形作如下假設:
(1)每個道路災點僅有一個工作隊進行搶修;
(2)各個工作隊的工作能力相同;
(3)在交通網(wǎng)絡中,工作隊的車輛優(yōu)先或?qū)S玫缆罚?/p>
(4)工作隊已掌握所有道路災點信息。
因為在震后應急期內(nèi)人民的生命依然受到直接威脅,為了盡快的開展救援工作,必須使得道路盡快搶通,因此在應急階段考慮的目標為最小搶修時間。在整個交通網(wǎng)路圖中,我們將有關符號進行如下說明:
i=0:工作站;
i=1,2,3,…,n:災點;
k=1,2,3,…,m:工作隊;
Lij:從災點i到j的旅行距離;
Tij:從點i出發(fā)至災點j的時間,由于旅行時間相對于維修時間非常小,故將旅行時間忽略。將Tij表示為從點i到點j的模糊維修時間;
[ai,bi]:維修 i點的時間窗,ai,bi分別為 i開始的時間和結(jié)束的時間。
我們用x,y和t三個決策變量刻畫運行計劃,其中:
x=(x1,x2,…,xn):整數(shù)決策變量,表示n個不同的災點,對于所有的 i≠j,有 1≤xi≤n 和 xi≠xj,i,j=1,2,…,n。 實際上它是序列{x1,x2,…,xn}的一個重排。
y=(y1,y2,…,ym-1):整數(shù)決策變量,y0≡0≤y1≤y2≤…≤ym-1。
t=(t1,t2,…,tm):tk代表車輛k從工作站出發(fā)的時間,k=1,2,…,m。因工作隊投入搶修工作有序,其出發(fā)時間可能有差別。本文假定工作隊同時被指派,僅僅指派時間不全相同的情況,考慮在滿足道路搶修的時間窗下,各隊應在何時出發(fā)。
注意到運行計劃可以由x,y和t按下面的方式完全確定。對于每個k(1≤k≤m),如果yk=yk-1,表示車輛k沒有運行;如果yk>yk-1,則表示車輛k已運行,并且離開配送中心的時間為tk,它的行駛路線為

這種方法比較直觀,且只有n+2m-1個決策變量。另外,注意到以上定義的決策變量x,y和t保證了:(1)每個維修隊最多被派遣一次;(2)所有的路線都以工作站為出發(fā)和結(jié)束點;(3)每個災點有且僅有一個維修隊進行維修;(4)路線中沒有子圈。
設fi(x,y,t)為維修隊抵達災點i處的時間函數(shù),它由決策向量x,y和t決定,i=1,2,…,n。由于當維修隊到達災點時候,應該立即進行維修,以爭取最短時間內(nèi)將道路搶通。如果維修隊 k 被派遣維修(即 yk>yk-1),1≤k≤m,則對任何 2≤j≤ykyk-1,有

其中∧表示在兩者中取小(即搶修隊如果早到,立即投入搶修),由于Tij是模糊的,因此抵達時間 fi(x,y,t),也是模糊變量,并且完全由上面兩式?jīng)Q定。
設g(x,y)是所有維修隊的旅行距離,有

其中

決策者根據(jù)實際情況給出災點i以置信水平βi在其指定的時間窗口[ai,bi]內(nèi)維修完成,于是 Cr{fi(x,y,t)∈[ai,bi]}≥βi,i=1,2,…,n。
可以應用痕跡檢驗方法檢驗油漆附著物,在發(fā)生多車碰撞交通事故的情況下,可以對同一部位印壓、刮擦痕上的油漆附著物進行檢驗,從而明確碰撞順序。具體而言,交通事故往往發(fā)生于瞬間,車輛相互作用力較大,車表面在外力的相互作用下容易出現(xiàn)破損、變形等情況。車輛表面往往會具有裝飾、保護功能的漆膜,因外力作用可能發(fā)生脫落、破損等狀況,遺落在其它相關車輛表面。基于此,當發(fā)生多車碰撞的事故時,以著力點為中心,進行痕跡檢驗,對油漆附著情況進行分析,即最上層所附著的油漆,為車輛最后碰撞所留,依次展開分析,有助于交通事故處理人員判斷車輛碰撞順序。
最后給出機會約束規(guī)劃模型
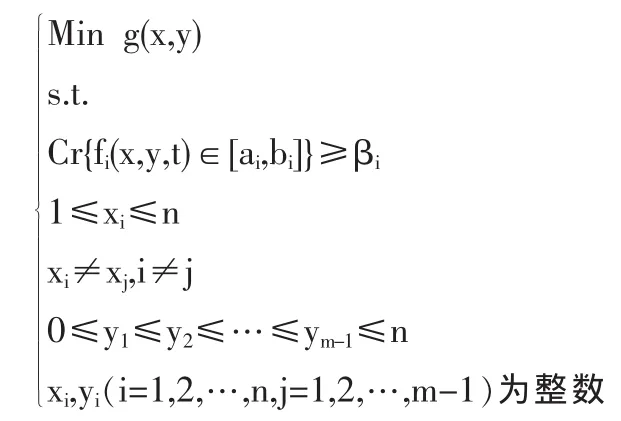
本文的利用隨機模擬和遺傳算法融合而成的混合智能算法進行求解,見Yongshuang Zheng[9],劉保碇等[10]文中的算法描述。
2 案例
本文收集5.12汶川地震后四川省什邡市的有關數(shù)據(jù),對什邡市的震后道路搶修排程問題進行研究。什邡市民政局提供的5.12汶川地震受災人口及其受災程度,如表1。
根據(jù)什邡市交通局提供的道路的受損情況,對道路災點進行整理如表2,其中連接重災區(qū)的道路災點以“*”表示。
由于什邡市的重災區(qū)很多,連接重災區(qū)的道路災點很多,假定工作隊每小時可搶修的受災路段長度為1km。搶修時間由前置災點的搶修時間加前置災點中最大的搶修時間表示。因震后道路搶修不確定性因素很多,本文將道路災點的搶修時間用三角模糊數(shù)表示,搶修時間列表略。
各災點由于連接的災區(qū)受損程度不同,因此在設定時間窗時,將結(jié)合災區(qū)情況予以考慮。本文將連接重災區(qū)的道路災點搶通須在60小時內(nèi),連接一般災區(qū)的道路災點須在72小時內(nèi)搶通。將地震發(fā)生時點定義為0時,道路災點的搶修須在72小時內(nèi)完成,以便及時地對重災區(qū)民眾進行救助。各災點時間窗如表3。
在應急階段,道路搶修的目標是在最短時間內(nèi)搶通道路。因每個道路災點都需要搶修,因此道路災點搶修時間不再考慮,僅考慮旅行時間,旅行時間又依賴于旅行距離,所以將旅行時間最小化轉(zhuǎn)化為旅行距離最小化,各災點之間的距離見表4。
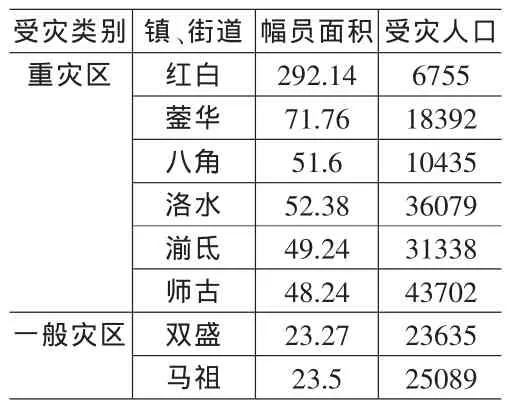
表1 什邡市“5.12”地震災害受災范圍表

表2 道路災點分布情況

續(xù)表
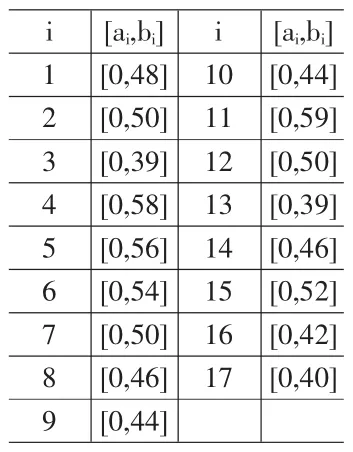
表3 時間窗
所有的工作隊從什邡市出發(fā)進行搶修,本文設定有4個工作隊,在0.9的置信水平下?lián)屝逓狞c。本文使用混合算法,用vc++6.0編程求解,其結(jié)果如下
工作隊1:什邡市→14→什邡市
工作隊 2: 什邡市→12→2→7→6→8→9→10→3→5→17→13→15→4→什邡市
工作隊3:什邡市→11→什邡市
工作隊4:什邡市→1→16→什邡市
此時的置信度為 Cr{fi(x,y,t)∈[ai,bi],i=1,2, …,17}=0.985,四隊最遲分別于震后的4.9小時,3.0小時,1.2小時和3.1小時出發(fā)。從結(jié)果可以看出工作隊2承擔的工作量非常重,也說明在工作隊2的工作線路在滿足整個時間窗非常重要,這也符合什邡市交通網(wǎng)路“一縱兩橫”的特點,在實際中則需加強工作隊2的工作能力,如可以協(xié)調(diào)工作隊1,3,4協(xié)助工作隊2完成這條工作線路。
在變換工作隊數(shù)目時,在規(guī)定的時間內(nèi)完成的置信水平0.9的情況下,其置信度水平及總距離改變?nèi)绫?。

表4

表5
從表中可以看出,隨著工作隊數(shù)目的增加,在時間窗內(nèi)修通道路災點的置信水平是增加的,增加的幅度逐漸降低,但工作隊行駛的距離也是增加的,其與本文設置的M有關,使得工作隊在通過某些災點時其行駛距離有很大增加。
3 結(jié)論
地震應急期內(nèi),對交通路網(wǎng)的搶修工作面臨的不確定性條件很多,在此種情況下,本文將搶修時間視為模糊變量,在總成本最小化的目標下,采用模糊約束規(guī)劃的方法構(gòu)建模型,并使用混合算法對問題進行了求解。
本文僅考慮一個災點僅被一個工作隊搶修的情況,實際中往往是會有多個工作隊搶修一個災點,將此假設條件放松,進而求解該問題是今后應繼續(xù)討論的。
[1]Cheng-Min Feng,Tsai-Chu Wang.Highway Emergency Rehabilitation Scheduling in Post-Earthquake 72 Hours[J].Journal of the Eastern Asia Society for Transportation Studies,2003,.5.
[2]Hitoshi Furuta,Ken Ishibashi,Koichiro Nakatsu,Shun Hotta.Optimal Restoration Scheduling of Damaged Networks Under Uncertain Environment by Using Improved Genetic Algorithm[J].Tsinghua Science And Technology,2008,13.
[3]Yan S.,Shih Y L.A Time-Space Network Model for Work Team Scheduling after a Major Disaster[J].Journal of the Chinese Institute of Engineers,2007,30.
[4]Shangyao Yan,Yu-Lin Shih.Optimal Scheduling of Emergency Roadway Repair and Subsequent Relief Distribution[J].Computers&Operations Research,2008.
[5]Baoding Liu,Kakuzo Iwamura.Chance Constrained Programming with Fuzzy Parameters[J].Fuzzy Sets and Systems,1998,94.
[6]Baoding Liu,Kakuzo Iwamura.A Note on Chance Constrained Programming with Fuzzy Coefficients[J].Fuzzy Sets and Systems,1998,100.
[7]Baoding Liu.Minimax Chance Constrained Programming Models for Fuzzy Decision Systems[J].Information Sciences,1998,112.
[8]Yongshuang Zheng,Baoding Liu.Fuzzy Vehicle Routing Model with Credibility Measure and Its Hybrid Intelligent Algorithm[J].Applied Mathematics and Computation,2006,176.
[9]張建勇,李軍.模糊車輛路徑問題的一種混合遺傳算法[J].管理工程學報,2005.
[10]劉保碇,趙瑞清,王綱.不確定規(guī)劃及應用[M].北京:清華大學出版社,2003.
[11]李軍,曾鸚,李妍峰.基于汶川地震的震后交通受損評估研究[J].管理評論,2008,(12).
