道路交通事故宏觀預測模型*
2010-12-01 03:58:16秦利燕邵春福
武漢理工大學學報(交通科學與工程版) 2010年1期
關鍵詞:模型
秦利燕 邵春福 趙 亮
(山東交通學院交通與物流工程系1) 濟南 250023) (北京交通大學運輸學院2) 北京 100044)
0 引 言
近年來,中國的道路交通安全形勢十分嚴峻,連續多年來交通事故死亡人數在10萬人左右[1-2],影響了經濟發展和社會穩定,保障人們的出行安全和貨物運輸安全,變得十分必要和迫在眉睫.因此對中國的交通安全形勢做出科學的預測,同時,為政府宏觀改善政策及具體應對措施的出臺提供依據十分必要.
目前國內外有多種方法應用于事故預測.Hong[3]等通過綜合考慮道路類型和交通特性的影響,改進了原有的交通事故預測模型;裴玉龍[4]提出的交通事故死亡人數預測模型,由于網絡收斂速度慢且預測結果的誤差較大.本文在對中國交通領域相關數據的分析整理的基礎上,用遺傳算法作為優化算法來優化神經網絡的權值和閾值,克服自身缺陷,較好地實現了事故死亡人數預測,使事故預測的方法更加完備.
1 道路交通安全評價指標及相關因素的確定
1.1 交通安全評價指標特性
在道路交通安全系統里面,交通安全水平面普遍采用事故次數、死亡人數、受傷人數和經濟損失這四個統計指標來衡量.
對事故次數來說,大多數的道路交通事故僅涉及物損,不涉及人員傷亡的事故統計中被大量遺漏,不同國家、區域統計的遺漏的程度也不同;對于經濟損失而言,由于各個國家和地區的貨幣體系的不同、事故處理人員的認知程度不同,統計主觀因素很大,而缺乏可比性;受傷人數的統計也存在類似的問題,因此也缺乏可比性.
交通事故死亡是交通安全危害最大的一種結果,并且涉及人員死亡的道路交通事故歷來受到高度重視,在統計中很少遺漏,所以它最能表征安全與不安全的特征.而且從各國、各區域的數據統計上來看,都對死亡情況作了詳細記錄,可比性也較強,因此應本文將死亡人數作為表征衡量交通安全程度的預測指標.
1.2 相關影響因素
道路交通安全不但與宏觀道路交通背景直接相關,而且與社會環境的大背景相關.道路交通事故的發生具有很大的隨機性,影響因素眾多,本文選取人均GDP、機動車保有量、公路里程作為道路交通事故預測模型的核心的指標.相關因素的近年數據變化情況和主管部門對未來發展趨勢的預測和規劃情況見表1.
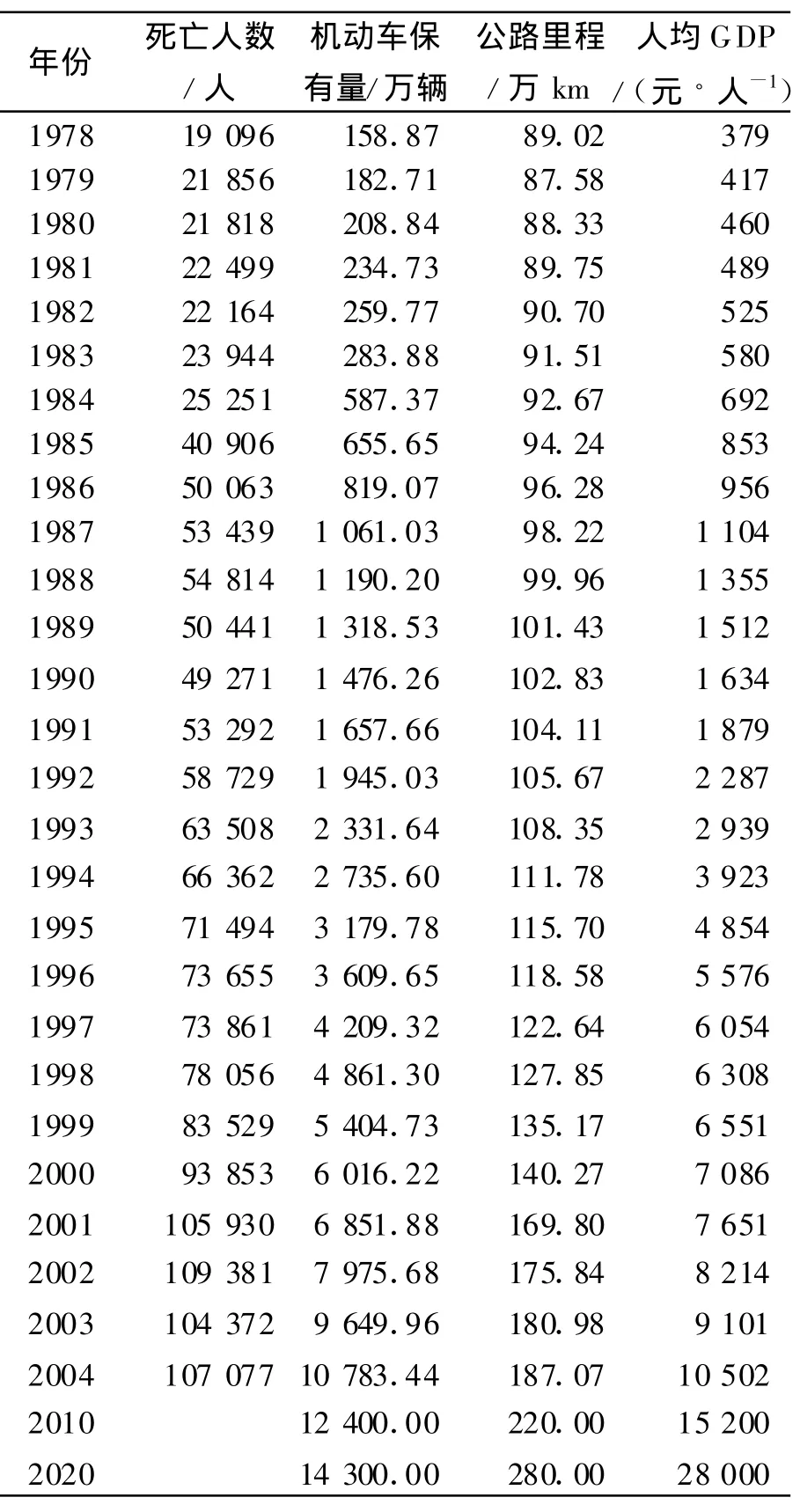
表1 中國歷年道路交通各項指標統計
2 遺傳優化神經網絡預測模型
2.1 用遺傳優化神經網絡學習算法
本文引入遺傳算法來優化神經網絡的權值和閾值,從而建立了一種新的事故死亡人數預測方法.其基本思想是以GA優化BP網絡的初始權值和閾值,再由BP算法按負梯度方向,修正網絡的權值和閾值,進行網絡訓練.這種方法避免了BP網絡易陷入局部極小的問題,實現優勢互補,達到優化網絡的目的[5-7].
1)編碼 對網絡中連接權值和閾值進行編碼主要有兩種方法:一是采用二進制編碼,另一種采用實數制編碼方案.本文采用二進制編碼.
2)產生初始群體M 種群的大小對遺傳算法影響很大,種群數目大,可增加種群中個體的多樣性,容易找到最優解,但會延長收斂時間;種群數目小可加快算法的收斂,但容易陷入局部極小(即不成熟收斂).本文中取M=40.
3)計算適應度 構造適應度函數 f,對于極小值采用下式
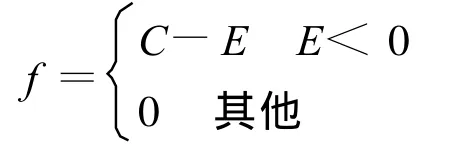
式中:C為常數;

然后,根據適應度函數計算出各個體的適應值,按適應值大小將個體進行遞減排列.
4)選擇(復制)操作 選擇適應度大的個體遺傳到下一代,本文應用適應度比例法.即各個個體的選擇概率與與其適應度成正比.如第i個個體的適應值為f i,則其被選中的概率為
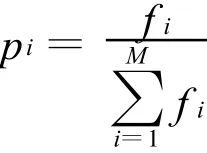
式中,M是群體規模.
5)交叉操作 從種群中按一定的交叉概率Pc隨機選擇2個權值個體,然后在個體字符串隨機設定一個交叉點,對該點后2個個體部分結構進行交換,生成新個體.
6)變異操作 以一定的概率P m從群體中隨機選取若干個體,對選中的個體,隨機地確定基因座即變異點對這些基因座的等位基因進行變異,在即將1換為0,將0換為1,其概率很小.
7)重復步驟3)、4)、5)、6),使初始權值及閾值分布不斷修正進化,取在整個操作中最優個體作為神經網絡的初始權值,然后對BP網絡進行訓練,求得全局最優解.
GA優化神經網絡的道路交通事故預測模型的學習過程框圖如圖1所示.
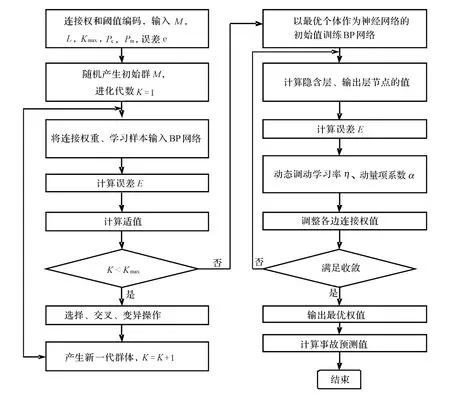
圖1 基于GA的神經網絡模型的事故宏觀預測學習過程圖
2.2 預測模型的訓練
采用1978~2004年的中國道路交通事故死亡人數的27組預測樣本(見表1),其中前21組作為訓練樣本,后6組作為檢驗樣本.
GA優化神經網絡模型確定輸入層神經元為3個,即公路里程、機動車擁有量、人均GDP;隱層節點確定為5個,輸出層為1個.在樣本的訓練過程中,取初始種群 M=40,交叉概率Pc為 0.65,變異率P m為0.005,終止進化代數K max為400,初始權值與閾值取值范圍(-15,16),取神經網絡的學習率η為0.7,誤差要求E m in為0.01.
BP網絡訓練確定了3個輸入層單元,分別是公路里程、機動車擁有量、人均GDP共3項因素,最佳隱層單元采用試算法確定為26,輸出層單元為預測未來年限的道路交通事故死亡人數.在樣本的訓練過程中,取神經網絡的學習率η為0.7,初始權值取值范圍(-1.0,1.0),誤差要求E min為0.01.
2.3 預測結果及分析
網絡訓練好后,同時將遺傳神經網絡和傳統的單獨的BP算法進行比較,結果見表2.將遺傳神經網絡和BP網絡的相對誤差取絕對值,計算平均誤差分別為5.40%和9.31%.
用訓練完畢且已掌握了“知識信息”的網絡進行預測時,只需將待測時段的3個影響因素資料輸入網絡,通過正向計算輸出各單元輸出值即刻可得到2010年和2020年的預測結果[8].
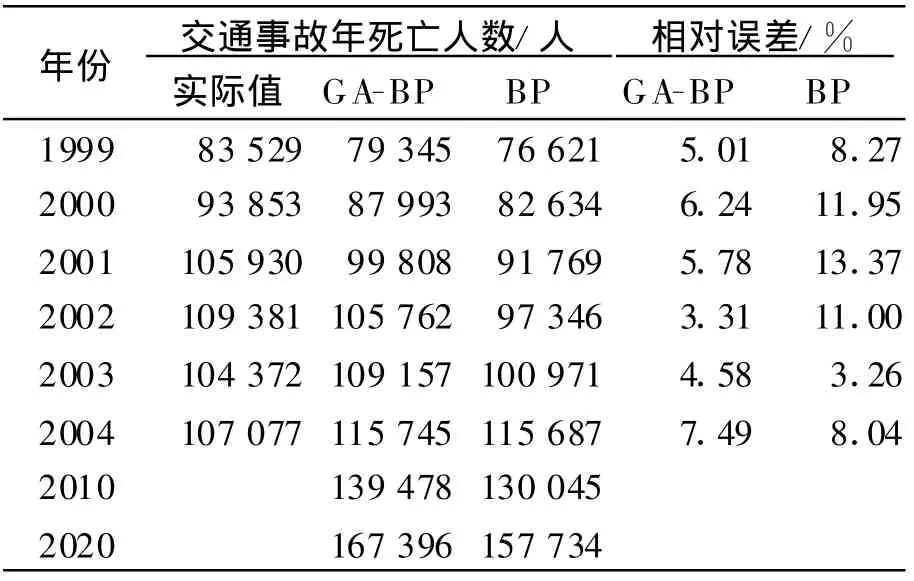
表2 道路交通事故死亡人數預測結果
2個模型的對比計算來看,用遺傳算法學習神經網絡權值,計算精度遠遠高于傳編統的單獨的BP算法,收到了比較好的預測效果,由于遺傳算法適合于處理規模較大的并行問題,收斂速度加快,網絡性能大大改善.
3 結 論
1)道路交通安全狀況的影響因素主要有機動車保有量、公路里程、人均GDP等.
2)借鑒遺傳算法全局尋優性和神經網絡局部尋優的特點,建立了基于遺傳算法的神經網絡道路交通事故宏觀預測模型.通過對兩個模型的計算和對比研究發現,基于遺傳算法的神經網絡事故預測模型計算精度高,網絡泛化能力強.
[1]公安部交通管理局.中華人民共和國道路交通事故統計資料匯編(1991~2006)[G].北京:公安部交通管理,2007.
[2]付 銳,劉浩學.關于中國道路交通安全政策框架的探討[J].交通運輸工程學報,2001(1):122-126.
[3]Hong D,Lee Y,K im J,et al.Development of traffic accident p rediction models by traffic and road characteristics in urban areas[C]//Proceedding of the Eatern A sia Society for Transportation Studies,Chiyoda-ku,Tokyo,2005:2046-2061.
[4]裴玉龍.道路交通事故成因分析及預防對策研究[D].南京:東南大學交通運輸工程系,2002.
[5]戴 葵.神經網絡實現技術[M].長沙:國防科技大學出版社,1998.
[6]呂 俊,張興華.幾種快速BP算法的比較研究[J].現代電子技術,2003,24(5):78-82.
[7]劉勇健.基于智能算法的地下水位動態預測模型的建立與應用[J].水文地質工程地質,2004(3):55-58.
[8]秦利燕.道路交通事故預測預防理論與方法研究[D].北京:北京交通大學交通運輸學院,2006.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19