磁懸浮軸承開關功率放大器系統建模及控制研究
2010-12-03 09:47:28徐龍祥
中國機械工程 2010年4期
關鍵詞:信號
王 軍 徐龍祥
南京航空航天大學,南京,210016
0 引言
磁懸浮軸承由于無機械摩擦、損耗小、無潤滑的特點而適用于高速旋轉的場合[1-2]。磁懸浮軸承改變了傳統的支承形式,提高了工作效率,廣泛應用在透平膨脹機、高速電機[3]和無軸承電機[4-6]等高新技術領域。磁懸浮軸承開關功率放大器的作用是控制電磁線圈的電流以產生相應的電磁力,需要根據控制器信號轉換成不失真的電流信號,其性能對磁懸浮軸承系統控制效果有顯著影響,因此建立開關功率放大器數學模型成為理論分析磁懸浮軸承控制系統的關鍵[7-9]。目前磁懸浮軸承開關功率放大器系統的分析方法有兩種:一種是基于仿真軟件建立的開關功率放大器模型[10-12],如利用Simulink中的電力系統模型庫和電路仿真軟件PSPICE建立的仿真模型。這種方法的缺點是沒有建立清晰的物理概念,不能用于指導功率放大器設計;另外一種方法是簡化開關功率放大器模型[13],采用近似一階慣性環節作為實際的功率放大器模型,但是開關功率放大器本質是一個非線性的系統,這種近似的模型不能完全反映開關功率放大器的特性。
磁懸浮軸承功率放大器有兩電平和三電平兩種形式。兩電平功率放大器應用廣泛,但是其電流紋波大,取代它的是三電平功率放大器。三電平功率放大器電流紋波小,非常適合用于高精度的磁懸浮軸承系統。本文以三電平功率放大器為例,在分析開關功率放大器三電平控制工作原理的基礎上[14-16],以傅里葉級數表達式來代替功率放大器非線性部分,推導系統各部分數學模型,建立了開關功率放大器的閉環傳遞函數。
1 開關功率放大器閉環系統
開關功率放大器主要由PI控制器、PWM調制器、功率主電路和電流反饋環節組成,開關功率放大器控制系統框圖見圖1。PI調節器對參考信號uref(s)與反饋信號uf(s)相減所得的誤差信號e(s)起比例積分調節作用,另外也改善開關功率放大器的閉環特性。PWM調制器用控制信號uc(s)與三角載波交截得到的脈沖電壓信號驅動開關管S1和S4。改進半橋功率主電路由開關管S1和S4、快恢復二極管D2和D3組成,這種電路只能為磁懸浮電磁線圈提供單方向的電流,即電流從a點進入,b點流出。用開關管S2和S3替代快恢復二極管D2和D3,組成的全橋電路可以給電磁線圈提供雙方向的電流。因分析的原理相似,本文以提供單方向電流的三電平開關功率放大器為例建立數學模型。
2 開關功率放大器系統建模
2.1 三電平功率電路工作原理[16]
基于三電平控制原理的功率放大器電路有4個不同的工作模式,各工作模式原理如圖2所示。
(1)工作模式1為線圈電流增大狀態。開關管S1和S4同時導通,二極管D2和D3關斷,線圈兩端電壓為電源電壓Ui,線圈電流iL增大。
(2)工作模式2為線圈電流續流狀態。開關管S1導通,S4關斷,二極管D3開通,線圈電流 iL沿同方向續流。
(3)工作模式3為線圈電流減小狀態。開關管S1和S4關斷,二極管D2和D3開通,電源電壓Ui反向加載于線圈兩端,線圈電流iL減小。
(4)工作模式4為線圈電流續流狀態。開關管S4導通,S1關斷,二極管D2開通,線圈電流 iL沿同方向續流,與模式2狀態相同。
三電平功率放大器電路根據負載電流iL與給定參考電流信號i0之間的關系確定工作模式。當負載電流iL小于給定參考電流信號i0時,電路將在模式1和模式2之間交替工作,負載電流逐漸增大到參考值。當負載電流iL大于給定參考電流信號i0時,電路將在模式3和模式4之間交替工作,負載電流減小至參考值。
三電平控制原理如圖3所示。圖3中S1和S4為開關管的驅動信號,是PI控制器根據誤差信號調節輸出的信號uc與三角載波交截生成的,d1為開關管S1的占空比,d2為開關管S4的占空比,δ14為S1和S4同時作用在電磁線圈L兩端等效的占空比,uab為電磁線圈L兩端的電壓,Ui為直流電源電壓幅值,T為開關周期。三電平控制電路穩態工作時,負載電流工作在參考電流i0附近。在d4T(d6T)時間段,電路工作在模式2或模式4,負載電流在自身阻抗和開關管導通壓降的作用下略有減小;在d3T(d5T)時間段,電路工作在模式1,S1和S4同時導通以補償續流狀態負載電流的損失。
2.2 功率放大器閉環系統模型
由圖2電路工作原理可得開關功率放大器在一個周期內的狀態方程:
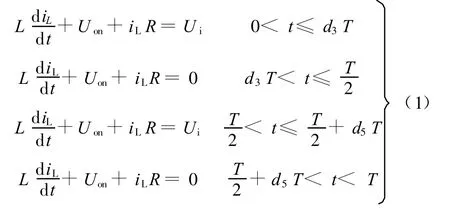
式(1)可簡化為

式中,Uon為開關管和二極管導通壓降的平均值;R為電磁線圈的等效電阻;L為電磁線圈的電感;d3T、d5T為開關功率放大器穩定工作在模式1的時間。
δ14為與開關管S1和S4有關的周期開關函數,是一非線性函數,對其用傅里葉級數展開:
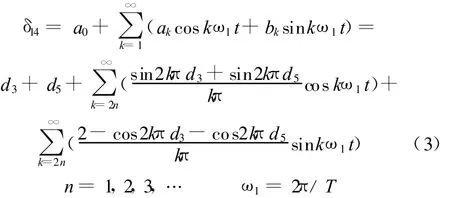
可以看出式(3)只有偶數項諧波,奇數項諧波為零。
電磁線圈電流iL受輸入電壓信號uab激勵,也可用傅里葉級數形式表示。在一個周期內令

將式(4)代入式(2),且由三角載波的對稱性,有d3=d5,由諧波平衡原理可得各次項方程:
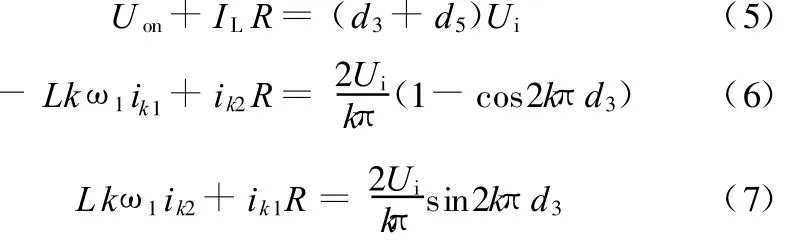
式(5)為直流項方程,變換形式得

式(8)為電磁線圈電流上升段時間,其結果與文獻[16]推導的式(34)的結果基本相似。
由式(6)和式(7)可解得各高次項系數:
故負載電流iL的紋波電流ik可由下式表示:

電磁線圈兩端電壓uab為
電源Ui提供給功率電路的輸入電流is為
由圖3和式(3)可知,在開關函數δ14的傅里葉級數中只有直流分量起有效傳輸能量作用,其他高頻諧波分量小,可忽略,則:

式中,d4、d6為開關功率放大器穩定工作在模式2或模式4的占空比;uc為控制器輸出信號;Utri為三角載波電壓幅值。
將式(13)和式(15)合并可得從調制器輸入到功率電路輸出的傳遞函數:

電流反饋環節功能是將電磁線圈電流轉換為相應的電壓反饋信號,可認為是線性關系,其傳遞函數H為

式中,h為電流反饋系數。
在開環系統中加入補償環節來提高系統帶寬,增加穩定裕量,本文給定一簡單的補償網絡傳遞函數,為

式中,p2、p3為常系數。
綜合式(16)、式(17)和式(18)可得開關功率放大器系統的閉環傳遞函數:

式(19)表明建立的三電平功率放大器閉環系統數學模型為一個二階系統,而文獻[13]將系統近似為一階慣性環節模型。
3 仿真與試驗
本文以單方向電流的三電平開關功率放大器為例建立了數學模型,得出閉環系統傳遞函數,并進行仿真與試驗。圖4為仿真與試驗依據的電路工作步驟框圖。仿真以虛線框內本文建立的閉環系統傳遞函數模型作為研究對象,試驗對根據電路工作步驟框圖研制的樣機進行測試。磁懸浮軸承三電平開關功率放大器仿真與試驗的參數如下:直流母線電壓Ui=50V,電流反饋系數h=5,三角載波單邊幅值Utri=13V,電磁線圈電流IL=1A,線圈等效電阻R=2Ω,線圈電感L=0.9mH。
三電平功率放大器輸出的電磁線圈電流紋波ik根據式(11)得


式(20)為前8次偶次諧波的紋波電流計算表達式,ξ(ω1t)為含10次諧波以上無窮小分量,計算得電流紋波大小約0.08A,在相同參數下由文獻[16]中式(34)計算的電流紋波為0.07A,用PSPICE軟件仿真電路法得出電流紋波大小為0.07A,試驗測得電流紋波大小約0.10A,可知由該模型建立的輸出電流方程比較符合功率放大器電路實際工作特性。
三電平開關功率放大器閉環系統的階躍響應波形如圖5所示。參考輸入電壓為±2V的階躍信號,負載輸出電流從0.6A上升到1.4A時數學模型仿真波形如圖5a所示,輸出電流到達穩態需要約130μ s。圖 5b是三電平開關功率放大器的PSPICE電路仿真階躍響應的結果圖,輸出電流同樣需要約 130μ s達到穩態。圖 5c是功率放大器電路的試驗結果圖,從圖中可知階躍響應所需要時間與仿真結果基本一致。
三電平開關功率放大器動態性能對磁懸浮系統控制效果有顯著影響,磁懸浮軸承系統一般工作在60 000r/min(對應的頻率為1000Hz)以下,故在此頻率下研究建立的數學模型動態特性具有指導意義。參考輸入電壓幅值為±2V的激勵正弦信號,信號頻率為1000Hz,三電平開關功率放大器數學模型的電流輸出特性如圖6所示。圖7是三電平開關功率放大器的PSPICE電路仿真電流輸出特性圖,圖8是三電平開關功率放大器的實際電路試驗得到的電流輸出特性圖。由3種結果對比可知,由數學模型得到的開關功率放大器在高頻下特性與電路仿真、試驗結果相一致,輸出電流響應都在0.6~1.4A之間,測量結果表明通過數學模型法所得的系統特性與試驗結果基本相同,輸出電流能快速響應輸入信號的變化,數學模型能較好反映開關功率放大器實際的工作動態特性,可為研究磁懸浮控制系統提供較為精確的模型。
4 結束語
本文通過分析開關功率放大器電路三電平控制原理,對系統中非線性部分采用傅里葉級數表達式代替,建立線性的開關功率放大器數學模型,得出開關功率放大器閉環系統的傳遞函數,利用MATLAB軟件對數學模型進行仿真,得到的結果與其他軟件仿真結果和試驗結果基本一致,表明得到的開關功率放大器數學模型是可行有效的,可以指導性地設計不同的補償網絡以滿足對負載電流動態性能的要求,對研究磁懸浮系統的穩態和動態特性具有重要意義。
[1]徐龍祥,周瑾.機械設計[M].北京:高等教育出版社,2008.
[2]徐龍祥,張金淼,余同正.H∞控制理論在磁懸浮軸承系統中的應用研究[J].中國機械工程,2006,17(10):1060-1064.
[3]Wang Fengxiang,Zong Ming,Zheng Wenpeng,et al.Design Features of High Speed PM Machine[C]//Proceedings of the 6th International Conference on Electrical Machines and Systems.Beijing:2003,66-70.
[4]王曉琳,鄧智泉,嚴仰光.一種新型的五自由度磁懸浮電機[J].南京航空航天大學學報,2004,36(2):210-214.
[5]劉賢興,孫宇新,朱熀秋,等.無軸承永磁同步電機的發展、應用和前景[J].中國機械工程,2004,15(17):1594-1597.
[6]劉曉軍,劉小英,胡業發,等.人工心臟泵磁懸浮轉子非線性特性及控制方法研究[J].中國機械工程,2006,17(20):2091-2094.
[7]Liu Shuqin,Chen Darong,Xu Feng.Study of Switching Power Amplifier for Active Magnetic Bearing[C]//Proceedings of the 4th International Power E-lectronics and Motion Control Conference.Xi'an,2004:1539-1543.
[8]Schulz A,Schneeberger M,Wassermann J.A Reliability Analysis of Switching Power Concepts for Active M agnetic Bearing[C]//Proceedings of the IEEE International Conference on Industrial Technology.Mumbai:IEEE,2006:1460-1465.
[9]Carabelli S,Maddaleno F,Muzzarelli M.High Efficiency Linear Power Amplifier for Active Magnetic Bearings[J].IEEE Transactions on Industrial Electronics,2000,47(1):17-24.
[10]張亮,房建成.基于MAT LAB的電磁軸承開關功放建模與仿真研究[J].系統仿真學報,2007,11(19):2395-2398.
[11]臧曉敏,王曉琳,仇志堅,等.磁軸承開關功放中電流三態調制技術的研究[J].中國電機工程學報,2004,24(9):167-172.
[12]Zhang Liang,Fang Jiancheng,Liu Gang.Modeling and Simulation of the Switching Power Amplifier for Magnetic Suspending Flywheel[C]//Proceedings of the Eighth International Symposium on M agnetic Suspension Technology.Dresden,2005:240-244.
[13]Buding P K,Werner R.Stiffness of Magnetic Bearings[C]//Proceedings of the Fourth International Symposium on Magnetic Bearings.Zurich,1994:251-255.
[14]Zhang Jing.Synchronous Three—level PWM Power Amplifier for Active Magnetic Bearings[C]//Proceedings of the 5th International Symposium on M agnetic Bearing.Kanazawa,1996:277-282.
[15]曾學明,徐龍祥,劉正塤.電磁軸承三電平 PWM 功率放大器研究[J].電力電子技術,2002,36(3):13-15.
[16]張亮,房建成.電磁軸承脈寬調制型開關功放的實現及電流紋波的分析[J].電工技術學報,2007,22(3):13-20.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06