基于模糊自適應PID的溫度控制系統
2011-01-10 03:37:00王曉員
成都大學學報(自然科學版) 2011年4期
王曉員
(合肥學院基礎實驗與實踐教學中心,安徽合肥 230022)
0 引 言
在電氣系統控制的發展中,PID控制在電氣系統控制中占據重要的地位.但傳統PID控制參數一經確定后,無法隨著對象的變化而調整,而在實際電氣控制中,會出現時變的、非線性、易受到隨機干擾的情況,為了使系統具有很好的動態性能,希望參數能依據當前系統的狀況來做出相應的調整.模糊控制是以模糊語言集、模糊變量和模糊推理為基礎的新型智能控制算法,其特點是無需知道被控系統的數學模型,控制性能魯棒性強[1,2].目前,PLC的功能指令越來越強大,依據模擬量的輸入輸出模塊就能夠實現許多復雜的控制算法.將模糊控制理論與PLC相結合,對無法建立精確數學模型的、復雜的非線性控制系統,有較好的控制效果[3-5].本文將模糊控制理論與PID控制算法相結合,設計了一種基于PLC的模糊自適應PID溫度控制系統,在實際應用測試中,取得了良好的控制效果.
1 模糊自適應PID控制器設計
1.1 模糊自適應PID控制系統結構
模糊自適應PID溫度控制系統結構如圖1所示.
由圖1可見,控制系統由模糊控制器與PID控制器2部分組成.模糊控制器是由SFC1、SFC2、SFC3子模糊控制器構成的復合模糊控制器.模糊推理系統利用系統的誤差和誤差變化率作為輸入,依據設計好的模糊推理規則來進行模糊推理運算,分別控制PID控制器的參數,Kp、Ki、Kd,使系統達到較好的動態、靜態性能.本控制系統的子模糊控制器的輸出為:
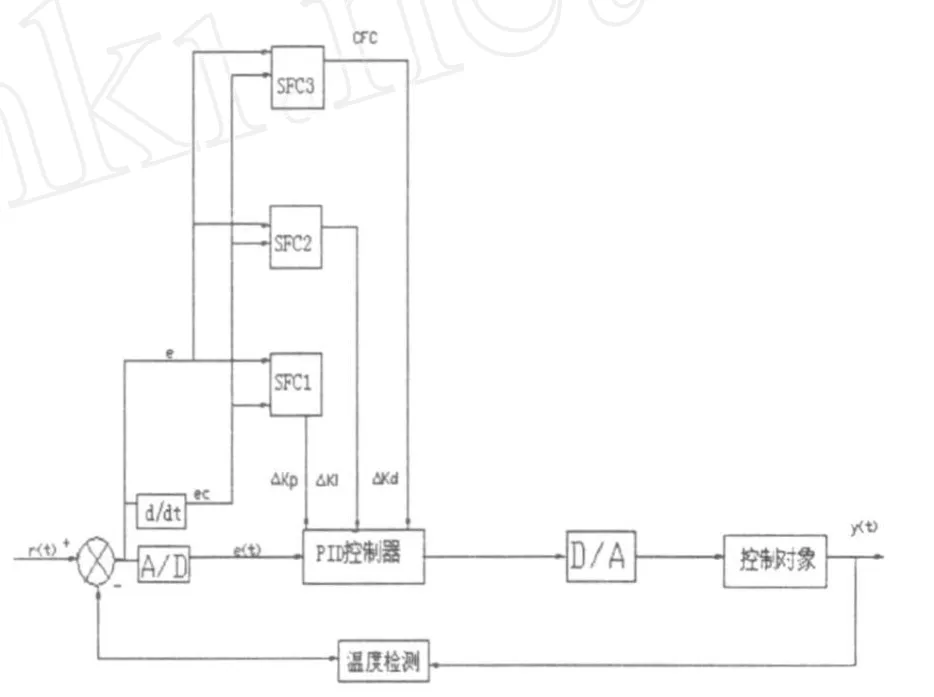
圖1 模糊自適應PID溫度控制系統結構示意圖
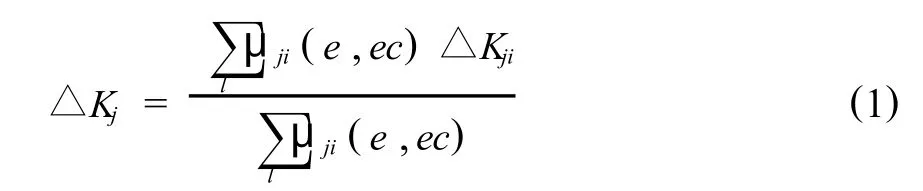
式中,△Kj分別代表 △Kp、△Ki、△Kd.
模糊控制器的輸出 △Kp、△Ki、△Kd分別經過修正系數修正后,和常規PID控制器的 Kp′、Ki′、Kd′分別相加,相加之和作為PID控制器的實際參數.
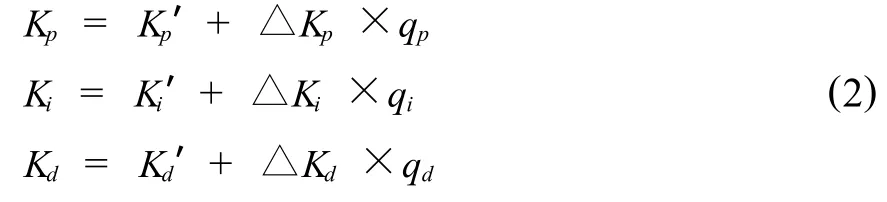
式中,qp、qi、qd分別為 △Kp、△Ki和 △Kd的修正系數.Kp、Ki、Kd是PID控制器的實際控制參數.
1.2 PID參數調整規則
數字PID控制算法為,

通常,模糊規則的建立依賴于操作者的經驗與技術專家的技術知識.依據 Kp、Ki、Kd對系統輸出的影響,得出 Kp、Ki、Kd的調整規則如下:
(1)當|e|較大時,可加快系統的響應速度,取較大的 Kp,較小的 Kd,為防止積分飽和,去掉積分,取Ki=0.
(2)當|e|、|ec|的值處于中間時,為防止系統產生過大的超調量,可取較小的 Ki值,適中的Kp、Ki,以保證系統的響應速度.
(3)當|e|較小時,適當選取 Kd值.如果|ec|較小,Kd可取大些;如果|ec|較大時,Kd可取小些,以保證系統響應具有良好的穩態性.
同時,依據PID參數的作用,在不同的偏差和偏差變化率時,對 PID參數的要求,可制定相應的△Kp、△Ki、△Kd模糊控制規則.
1.3 論域和隸屬度函數
本控制系統利用采樣得到的溫度信號和給定值相比較,得系統的誤差和誤差變化率,再通過量化,得到系統的輸入變量e和ec,輸出變量 △Kp、△Ki、△Kd.隸屬函數是論域元素對于變量從屬程度的描述,根據控制對象的具體情況,本文選用三角型隸屬函數,輸入變量e和ec,輸出 △Kp、△Ki、△Kd均采用三角型隸屬函數.
誤差 e和誤差變化率ec的模糊子集為,{PB、PM、PS、ZO、NS、NM、NB},其對應的論域為,{3、2、1、0、-1、-2、-3}.
輸出變量 △Kp、△Ki、△Kd的模糊子集為, {PB、PMB、PM、PMS、PS、ZO、NS、NMS、NM、NMB、NB},其對應的模糊論域為,{1、0.8、0.6、0.4、0.2、0、-0.2、-0.4、-0.6、-0.8、-1}.
1.4 建立模糊控制表
由于模糊推理過程必須進行復雜的矩陣運算,計算量很大,在線實施推理很難滿足控制系統實時性的要求,據此本文采用查表法來進行模糊推理運算,依據制定的模糊控制規則也就是推理語句,求出控制量,并以此來制定模糊控制表.
根據圖1,控制系統的推理語句形式可表示為,
If e is Ai、and ec is Bithen△Kjis Ci
其中,Ai、Bi、Ci分別是e、ec和輸出量 △Kj(j=p、i、d)的模糊子集,其合成關系是,

對于特定的輸入量A*i、B*i,通過式(4)可以計算得到對應的輸出量 C*i.將求得的模糊控制輸出量 C*i求并,可得到模糊輸出 C*,

模糊控制輸出 C*是模糊量,運用反模糊加權平均法求得輸出控制量 △Kj的精確值,并且經Matlab仿真加以修正,最后獲得如表1所示模糊控制表.
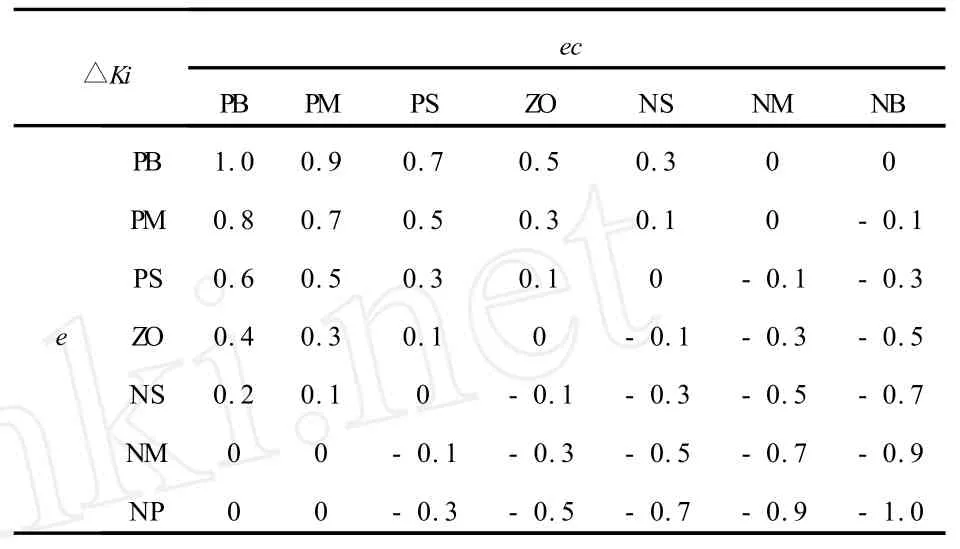
表1 模糊控制表
2 模糊自適應PID溫度控制系統
2.1 溫度控制系統組成
本文設計的模糊自適應PID溫度控制系統由PLC、輸入/輸出模塊、EM235模塊、接觸器等組成. PLC采用西門子S7-200系列CPU224.依據不同的輸入指令,PLC進行各數字量的邏輯控制、模擬量的處理、數據運算,通過變頻器控制電機控制泵的速度,從而使系統溫度穩定在設定值范圍中.溫度控制系統結構如圖2所示.
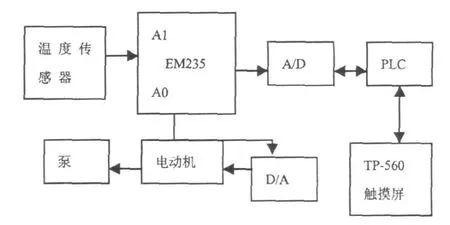
圖2 溫度控制系統結構圖
2.2 系統控制過程
系統控制過程的具體步驟為:
(1)系統的各項操作指令通過觸摸屏及通訊電纜傳送到PLC.PLC依據操作指令與預先設計好的程序進行相應的動作控制.
(2)PLD控制器的參數在觸摸屏上設定.通過觸摸屏來讀取PLC相應存儲器的數值,顯示被控系統的數值與變化情況.
(3)通過EM235模塊對模擬量的輸入與輸出轉換.系統的溫度經溫度傳感器檢測并經過EM235模塊轉換后,利用電流傳輸,來減少干擾信號的影響.
(4)觸摸屏和PLC間采用RS-485通訊方式,數據類型是8位數據位,1位停止位.
(5)PLC依據采集到的誤差與誤差變化率輸入信號,通過限幅量化處理,所對應的模糊論域中的值,查詢模糊控制表,求出 △Kp、△Ki、△Kd的值并加以修正,和 Kp′、Ki′、Kd′相加,得到PID調節器的控制參數 Kp、Ki、Kd,依據PID控制算法計算輸出控制量.
2.3 結果與分析
本文設計的模糊自適應溫度控制器應用在鍋爐溫度控制系統中后,結果如圖3所示.
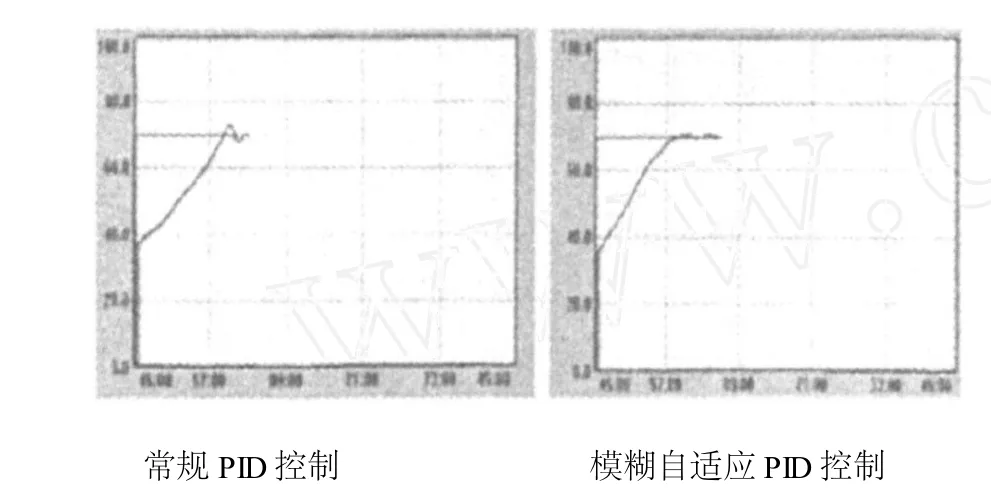
圖3 鍋爐溫度實時曲線
由于鍋爐溫度為非線性變化,由圖3可見,采用單一PID控制器控制時效果較差,與常規PID控制相比,模糊自適應PID控制波動度小、超調量小、穩定性好、過渡時間短,有較強的魯棒性,其性能明顯優于常規PID控制.
3 結 語
在PID控制與模糊控制技術的基礎上,設計了基于模糊自適應PID的溫度控制系統,系統具有很好的控制品質與較好的魯棒性.實際應用表明,此溫度控制系統方法簡單、經濟,具有一定的推廣應用價值.
[1]譚偉,徐玲.智能溫室溫濕度控制系統設計及其仿真[J].東北林業大學學報,2008,36(8):88-89.
[2]謝書明,柴天佑.一種參數自適應模糊PID控制器[J].信息與控制,1998,27(4):255-259.
[3]李祖欣.Matlab在模糊控制系統設計和仿真的應用[J].系統仿真學報,2003,15(1):132-134.
[4]劉金琨.先進PID控制Matlab仿真[M].北京:電子工業出版社,2004.
[5]SIEMENS.SIMATIC S7-200可編程控制器系統手冊[G].SIEMENS,2004.
[6]諸靜.模糊控制原理與應用[M].北京:機械工業出版社, 2003.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
