插秧機(jī)偏置橢圓齒輪后插旋轉(zhuǎn)式分插機(jī)構(gòu)優(yōu)化設(shè)計(jì)
2011-01-10 03:35:58宮霞霞
關(guān)鍵詞:優(yōu)化設(shè)計(jì)
宮霞霞,劉 麗
(成都大學(xué)工業(yè)制造學(xué)院,四川成都 610106)
0 引 言
水稻在栽插時要求插秧機(jī)的插植臂在回轉(zhuǎn)運(yùn)動的過程中,當(dāng)秧針取秧時苗箱橫向移動的速度減慢,而在非取秧的時間間隔中苗箱的橫向移動速度加快,從而實(shí)現(xiàn)非勻速送秧.這樣可減少對秧塊橫向的擠壓和撕扯,提高取秧精度,確保插秧效率.據(jù)此,為保證插秧過程中的農(nóng)藝要求精度,對步行式插秧機(jī)的偏置橢圓齒輪后插旋轉(zhuǎn)式分插機(jī)構(gòu)進(jìn)行優(yōu)化設(shè)計(jì).
1 機(jī)構(gòu)簡化圖及運(yùn)動分析
1.1 機(jī)構(gòu)簡化圖
偏置橢圓齒輪后插旋轉(zhuǎn)式分插機(jī)構(gòu)的結(jié)構(gòu)如圖1所示.圖1中,在一個回轉(zhuǎn)的殼體里(相當(dāng)于輪系機(jī)構(gòu)的行星架)安裝3個全等的橢圓齒輪,3個橢圓齒輪的回轉(zhuǎn)中心均在橢圓齒輪的焦點(diǎn)上,且相位相同,并支撐在殼體上,兩套對稱的栽植臂分別與兩個行星輪軸相固連.工作時,殼體4作為一個原動件繞中心輪1的回轉(zhuǎn)中心的轉(zhuǎn)動,而中心輪1作為另一個原動體以殼體2倍的轉(zhuǎn)速同向轉(zhuǎn)動.栽植臂上秧爪輸出的絕對運(yùn)動為隨殼體的平動和繞行星輪軸心的不等速轉(zhuǎn)動的合成,從而使秧爪獲得適于分秧、插秧的運(yùn)動軌跡.另外,在栽植臂中附加推秧機(jī)構(gòu)(由6、7、9和10組成),其作用是插秧時將秧苗準(zhǔn)確推入土壤中.機(jī)構(gòu)中,分插機(jī)構(gòu)橢圓齒輪機(jī)構(gòu)的結(jié)構(gòu)設(shè)計(jì)精度決定了插秧機(jī)插秧效率及精度.因此,可將分插機(jī)構(gòu)中的一套栽植臂輪系機(jī)構(gòu)獨(dú)立出來,簡化成橢圓齒輪曲柄連桿滑塊機(jī)構(gòu),其機(jī)構(gòu)簡圖如圖2所示.
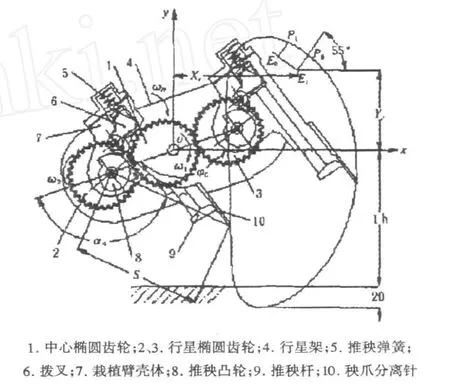
圖1 偏置橢圓齒輪后插旋轉(zhuǎn)式分插機(jī)構(gòu)結(jié)構(gòu)示意圖
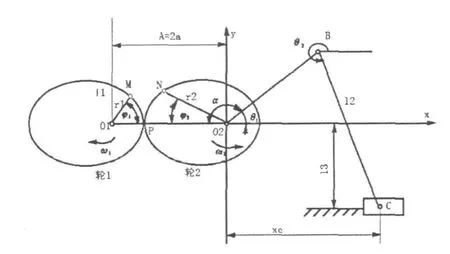
圖2 橢圓齒輪曲柄連桿滑塊機(jī)構(gòu)簡圖
1.2 機(jī)構(gòu)運(yùn)動分析
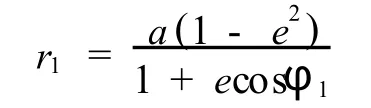
在簡化后的橢圓齒輪曲柄連桿機(jī)構(gòu)中,主動輪1和從動輪2是全等共軛的一對橢圓齒輪,P為瞬時節(jié)點(diǎn),以O(shè)1P和O2P分別作為兩輪極軸,當(dāng)輪1以角速度ω1轉(zhuǎn)過φ1角時,輪2則以變角速度ω2逆時針轉(zhuǎn)過φ2角,節(jié)曲線上轉(zhuǎn)過的弧長,MP⌒=NP⌒.同時,兩輪的向徑滿足,r1+r2=A=2a.令向徑 r1的極角為φ2,橢圓長半軸為 a,橢圓偏心率為e.
主動橢圓齒輪的節(jié)曲線方程為,
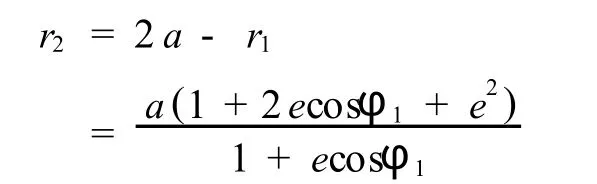
從動輪的節(jié)曲線方程為,
傳動比函數(shù)為,
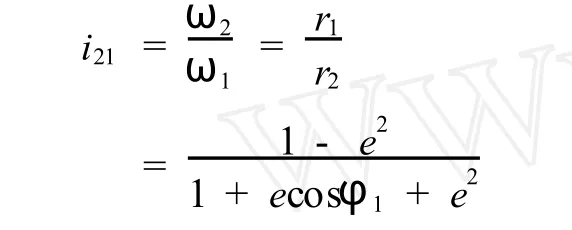
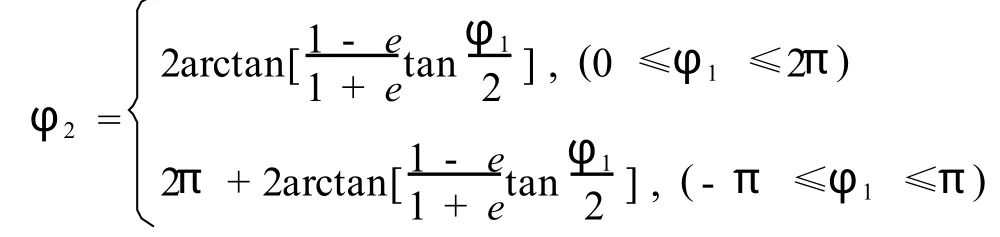
橢圓齒輪副的位置函數(shù)為,

則有,
對于曲柄滑塊部分,以O(shè)2為坐標(biāo)原點(diǎn)建立坐標(biāo)系 xO2y,其位移方程為,
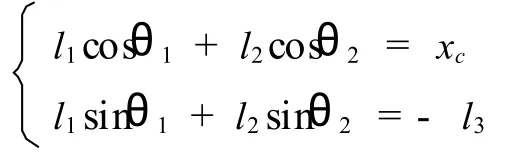
則,

對位移方程求導(dǎo),得到速度方程為,
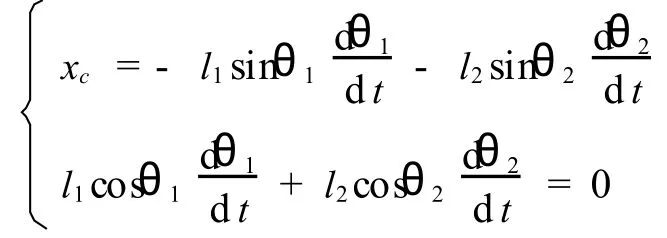
因?yàn)?

有,
因此,滑塊的速度,即分插的速度,可表示為,
由此可見,分插速度為主動橢圓齒輪轉(zhuǎn)角φ1的函數(shù)即,
2 分插機(jī)構(gòu)優(yōu)化設(shè)計(jì)
插秧機(jī)分插機(jī)構(gòu)秧針取秧時,苗箱橫向移動的速度減慢.而在非取秧的時問間隔中,苗箱的橫向移動速度加快,從而實(shí)現(xiàn)非勻速送秧.根據(jù)這一農(nóng)藝特點(diǎn),建立機(jī)構(gòu)優(yōu)化設(shè)計(jì)數(shù)學(xué)模型.
2.1 確定設(shè)計(jì)變量
以橢圓齒輪節(jié)曲線的偏心率e,曲柄 l1相對于從動輪2的位置角α,曲柄l1的長度,連桿l2的長度及滑塊的偏置距離 l3為設(shè)計(jì)變量,有,
2.2 建立優(yōu)化設(shè)計(jì)目標(biāo)函數(shù)
為保證取秧精度和插秧速度,以秧針取秧時的運(yùn)動速度,即滑塊進(jìn)程時速度等于設(shè)定最佳速度(設(shè)為c),為設(shè)計(jì)目標(biāo),并確定滑塊的左右兩個極限位置時,曲柄O2B與x軸正向的夾角θ1,即:
左極限,

右極限,
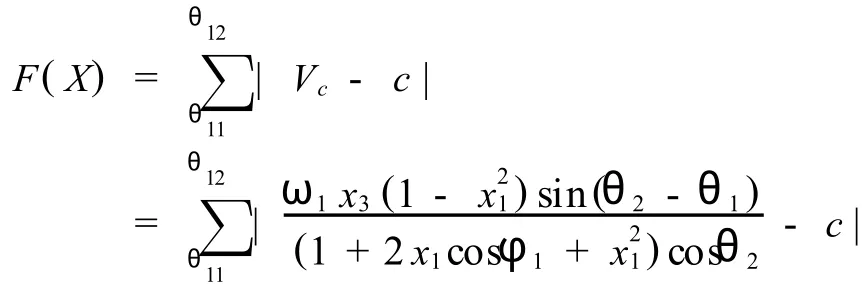
據(jù)此,目標(biāo)函數(shù)可以寫為,
2.3 約束條件及優(yōu)化設(shè)計(jì)模型
(1)邊界條件,
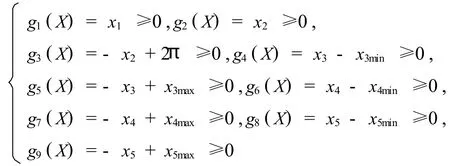
(2)四桿機(jī)構(gòu)曲柄存在條件,

(3)最小傳動角條件,

(4)橢圓齒輪運(yùn)動無突跳條件,即從動輪最大與最小角速度之比需滿足 K≤5,即,

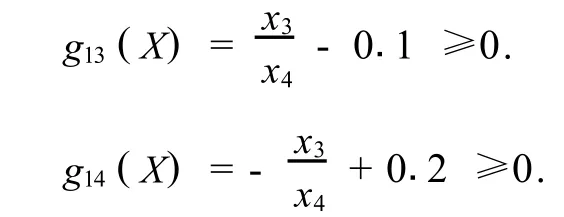
(5)曲柄和連桿的長度關(guān)系,
則,機(jī)構(gòu)優(yōu)化設(shè)計(jì)數(shù)學(xué)模型為,
其中,c=0.34m/s,ω1=180 rpm,Z=31,m=2.利用約束隨機(jī)方向法進(jìn)行求解得到,

優(yōu)化參數(shù)即得到,

3 總 結(jié)
通過對插秧機(jī)偏置橢圓齒輪后插旋轉(zhuǎn)式分插機(jī)構(gòu)簡化成非圓齒輪曲柄連桿滑塊機(jī)構(gòu),并對簡化模型通過數(shù)學(xué)建模和優(yōu)化設(shè)計(jì)計(jì)算,以確定機(jī)構(gòu)的各結(jié)構(gòu)參數(shù),從而保證插秧機(jī)取秧精度及插秧效率的農(nóng)藝要求.
[1]吳序堂,王貴海.非圓齒輪及非勻速比傳動[M].北京:機(jī)械工業(yè)出版社,1997.
[2]周杰,周少華.橢圓齒輪曲柄滑塊機(jī)構(gòu)的運(yùn)動分析及設(shè)計(jì)計(jì)算[J].武漢交通科技大學(xué)學(xué)報(bào),1998,22(3):84-87.
[3]方明輝,李革,趙勻,等.基于Matlab的非圓齒輪副齒廓算法研究[J].農(nóng)機(jī)化研究,2010,32(8):57-60.
[4]程啟森.基于UG的非圓齒輪設(shè)計(jì)與實(shí)現(xiàn)[J].煤礦機(jī)械, 2011,32(1):221-224.
[5]于大堅(jiān),鄔義杰,王彬,等.基于非圓齒輪傳動的精密壓力機(jī)驅(qū)動機(jī)構(gòu)設(shè)計(jì)[J].組合機(jī)床與自動化加工技術(shù),2010, 52(12):13-18.
[6]尹建軍,趙勻,張際先.高速插秧機(jī)差速分插機(jī)構(gòu)的工作原理及其CAD/CAE[J].農(nóng)業(yè)工程學(xué)報(bào),2003,19(3):1-5.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
