雙噴嘴擋板電液伺服閥主要參數的優化
2011-01-24 02:39:30陳奎生雷輝虎
武漢科技大學學報 2011年6期
關鍵詞:優化
黃 浩,周 淵,陳奎生,雷輝虎
(武漢科技大學機械自動化學院,湖北武漢,430081)
電液伺服閥是液壓伺服系統中的核心控制器件,起著連接液壓和電氣的紐帶作用,其代表性產品有噴嘴擋板式、射流管式、射流式和動圈滑閥式等類型。雙噴嘴擋板電液伺服閥由于具有控制精度高、響應速度快、死區小、運動平穩和結構緊湊等特點,在冶金和軍工領域均得到廣泛的應用。目前國內外對雙噴嘴擋板電液伺服閥的研究主要集中在優化結構參數、采用新材料和新內部結構等方面,而電液伺服閥的動態性能是由液壓系統的工況和伺服閥的結構參數決定的,優化伺服閥的結構參數對改善伺服閥的動態性能、提高伺服閥的響應速度具有重要的意義[1]。為此,本文以國產雙噴嘴擋板電液伺服閥為研究對象,推導出相關數學模型,并通過分析伺服閥動態性能的變化,從而達到其參數優化的目的。
1 數學模型描述
雙噴嘴擋板電液伺服閥由力矩馬達和液壓放大器組成,第一級為雙噴嘴擋板,第二級為四通滑閥,其動態方程可由以下4個基本方程來確定。
1.1 力矩馬達運動方程
力矩馬達傳遞函數為

式中:θ為銜鐵轉角,rad;Kmf為力矩馬達的總剛度[2](綜合剛度),N/m;ωmf為力矩馬達的固有頻率,其中,Ja為銜鐵組件的轉動慣量,kg·m2;ξmf為力矩馬達的阻尼比,ζmf其中,Ba為銜鐵的粘性阻尼系數;Kt為力矩馬達的電流-力矩增益;ΔI為輸入電流,A;Kf為反饋桿剛度,N/m;r為噴嘴中心至彈簧管回轉中心的距離,m;b為反饋桿中心至噴嘴中心的距離,m;Xv為閥芯位移,m;AN為噴嘴孔的面積,m2;pLp為兩噴嘴孔壓力差,Pa。
1.2 擋板位移與銜鐵轉角的關系
擋板位移Xf與銜鐵轉角θ的關系為

式中:Xf為擋板的位移,m。
1.3 噴嘴擋板閥控制閥芯的傳遞函數
噴嘴擋板閥控制閥芯的傳遞函數為

式中:Kqp為噴嘴擋板閥的流量增益;Av為主閥芯端面面積,m2;ωhp為滑閥的液壓固有頻率,rad/s;ξhp為滑閥的液壓阻尼比。
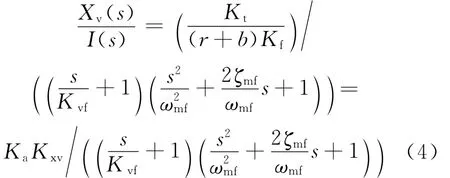
1.4 伺服閥傳遞函數
伺服閥簡化后總的傳遞函數為式中:Kvf為力反饋回路開環放大系數,Kvf=r(r+b)KtKqp/(AvKmf);Kxv為伺服閥增益[3],Kxv=Kt/(r+b)Kf;Ka為伺服放大器增益,Ka=2Ku/(Rc+rp),其中,Ku為放大器每邊的增益;Rc為每個線圈的電阻,Ω;rp為線圈回路的放大器內阻,Ω。
2 目標參數
影響伺服閥綜合性能的主要參數有:Kt、和Kf,其中Kt是力矩馬達增益,它處于閉環系統之外。當力矩馬達裝入伺服閥后,Kt可由放大器數字調節,單獨研究的價值不大。Kqp為噴嘴擋板閥流量增益,它取決于第一級泄漏流量和噴嘴與擋板之間的零位間隙大小,且Kqp受泄漏流量和力矩馬達功率的限制,對固定型號的噴嘴擋板閥變化不大。屬于力矩馬達機械阻尼比。所以對伺服閥動態性能的影響主要研究四個參數[4]。考慮到4個參數之間的耦合關系,在此引入另一個力反饋回路開環放大系數Kvf,即:
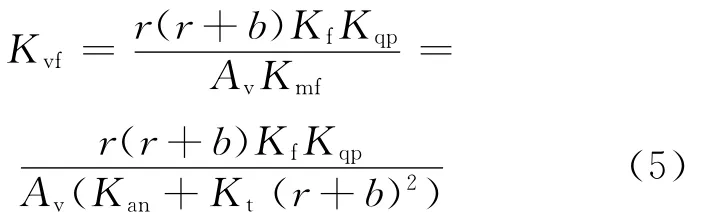
當噴嘴擋板上液動力忽略不計、銜鐵擋板的凈剛度Kan=0時,即:

由式(6)可知,Kvf和Av呈反比,與r/(r+b)的比值和流量增益Kqp呈正比[5],即:

由式(7)可得,ωmf與力矩馬達的綜合剛度Kmf根號呈正比,與銜鐵組件的轉動慣量Ja根號呈反比。從頻率法上看,對于任何伺服閥,當0.707時,系統具有較好的穩定性和較好的動態性能,但實際上伺服閥的阻尼比難達到此理想值,因此對伺服閥參數的優化主要集中對3個參數進行優化[5]。
3 參數優化
伺服閥參數優化的通常方法是利用Parseval定理,再將函數優化轉化為變量優化。選擇電液伺服閥的結構參數作為設計變量,以系統穩定性、快速性、穩態誤差最小為目標函數,建立伺服閥機構優化模型,從而達到伺服閥參數優化的目的[6]。
通過分別對4個目標參數求偏導數,然后再進行全微分,就可以得到主要參數與系統的關系。我們求得一組在穩定性條件下的伺服閥參數,運用Matlab軟件中的Simulink模塊仿真,對伺服閥的閉環傳遞回路進行仿真。通過改變目標函數的大小,得出伺服閥閉環伯德圖。對比仿真圖形,分析改變目標參數后的系統頻寬變化,從而得到目標函數與伺服閥動態性能的關系,完成了目標參數的優化。
3.1 力反饋回路開環增益Kvf的優化對比
當Kvf=900、Kvf=1 400時,其他參數不變,依據Simulink仿真得出力反饋系統閉環伯德圖如圖1所示。由圖1可看出,增大開環增益使伺服閥的頻寬明顯增加,但增量有限。
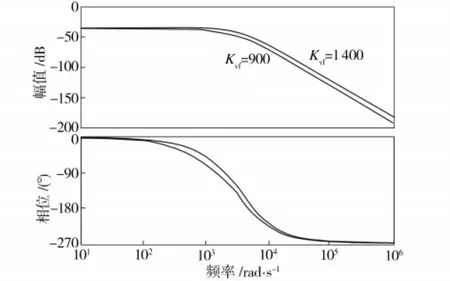
圖1 Kvf不同時力反饋回路閉環伯德圖對比Fig.1 Force feedback loop closed-loop Bode graph at different Kvf
3.2 力矩馬達固有頻率ωmf和綜合阻尼比的優化對比
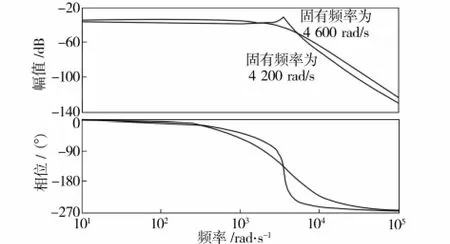
圖2 ωmf和不同時力反饋回路閉環伯德圖對比Fig.2 Force feedback loop closed-loop Bode graph at differentωmf and
4 結論
(1)伺服閥動態性能與很多參數相關,必須在仿真前確立系統的目標函數,只有將耦合度降至最低,才能求出目標函數對系統的影響。
(2)為增大Kvf,可適當增大Kqp和減小Av,以增大伺服閥的頻寬來提高響應速度,但增幅有限,因為Kvf受到穩定性的制約,當無限增大時,伺服閥穩定性就會降低。
(3)為增大ωmf和主要可增大力矩馬達的綜合剛度Kmf和減小銜鐵組件轉動慣量;也可增大以達到增大系統頻寬的目的。
[1] 方群,黃增.電液伺服閥的發展歷史、研究現狀和發展趨勢[J].機床與液壓,2007,35(11):162-165.
[2] 盧長耿,李金良.液壓控制系統的分析與設計[M].北京:煤炭工業出版社,1991:180-200.
[3] 王春行.液壓控制系統[M].北京:機械工業出版社,2000:90-97.
[4] Stefanov Y P,Makarov P V,Urkov P V,et al.Dynamic simulation of chip generation and formation in metal cutting[J].Theoretical and Applied Fracture Mechanics,1997,28:117-124.
[5] 王幼民.電液伺服閥結構參數優化[J].安徽機電學院學報:自然科學版,2002,17(2):13-16.
[6] 凌俊杰,周自振.提高電液伺服閥頻寬的途徑[J].機床與液壓,2004,32(18):113-118.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45