自適應模糊-PID控制在燃氣鍋爐系統中的應用
2011-03-06 06:38:54祁增慧河北建筑工程學院電氣工程系河北張家口075024
電源技術 2011年7期
關鍵詞:系統
祁增慧(河北建筑工程學院電氣工程系,河北張家口 075024)
目前,國內的工業鍋爐占據主流的仍然是燃煤鍋爐,但是燃煤鍋爐的污染嚴重,廢渣、廢氣、廢水“三廢”俱全,治理亦較困難,燃料儲存、輸送不便,自動化程度低,溫度調節慢。燃油鍋爐的煙塵排放量雖然較低,但其排放的有害氣體是造成“光化學煙霧”和酸雨的罪魁禍首,且運行成本高。而燃氣鍋爐具有占地面積少、排放污染少、調節迅速、易實現自動化、智能化控制。隨著社會經濟的發展和對節能、環保要求的提高,特別是對溫度自動調節要求較高的場合(如生物制藥、體育場館、賓館等的恒溫調節),燃氣鍋爐與燃煤鍋爐相比有著巨大的優勢。提高燃氣鍋爐系統運行性能,根據用戶需求及外界環境變化調整鍋爐系統運行狀態,將進一步節能減排,取得巨大的經濟效益。
當前運行的燃氣鍋爐自動控制系統大多繼承了經典PID(比例、積分、微分)控制算法。在工業過程控制中,PID控制器由于其原理清晰、整定簡單、應用經驗豐富,目前仍占統治地位。但是,PID控制一般只適用于小慣性、小滯后、且系統數學模型較精準的過程控制,而對于具有較大慣性和滯后的工業過程,特別是難以精確建模的非線性、時變系統,PID控制往往不能取得較滿意的控制效果。模糊控制及自適應控制經過多年的發展,在工業上已經得到廣泛應用,我課題組通過對燃氣鍋爐系統運行特性的分析研究,采用參數自適應模糊控制與PID控制相結合的控制方法取得了良好的控制效果。
1 控制對象特性分析與控制方案選擇
傳統的鍋爐控制系統是將溫度作為單一被控量,通過傳感器對回水溫度的檢測,與給定溫度比較產生偏差并對該偏差信號進行PID調節,形成恒值調節系統。PID調節器的三個參數通過理論及現場整定后一般不再調整。然而,燃氣鍋爐控制系統是一個典型的多輸入多輸出系統,溫度變化受室外氣溫、太陽輻射、空氣濕度、風速等因素的影響,水溫變化與負荷變化及循環水量、流量有關,系統存在大慣性滯后、非線性、時變、難以精確建模等特點。對于一些控制過程較為復雜且對控制精度和穩定性要求較高的系統,單一的PID控制方法就難以滿足要求了。并且常規PID調節器不具有在線整定參數的功能,不能滿足在不同工況下系統對控制參數的自整定要求。而環境對過程的影響及過程本身特性的變化是必然的,甚至其中一些變化可能還是大范圍的,一旦被控對象參數、結構發生變化,如用戶負荷的增減等,將影響其控制效果,或達不到溫控需求,或造成能源浪費。
模糊控制可模擬人腦的思維方式,能處理客觀世界的非精確、非線性的信息,具有很強的抗干擾能力。在常規的模糊控制系統中,由于模糊控制器實現的簡易性和快速性,往往采用二維控制器的形式。這類控制器都是以系統偏差和偏差變化率作為輸入變量,因此具有類似常規比例-微分控制器的作用,可以獲得良好的動態特性;但其可靠性差,并且當偏差和偏差變化率偏小時,傳統的模糊控制方法失去作用,從而導致模糊控制規則失效[1-2]。
自適應控制所要解決的問題是,當被控對象參數發生大范圍變化時,控制器如何自動地改變其自身參數,以使控制系統的性能維持不變,或具有更好的控制品質。
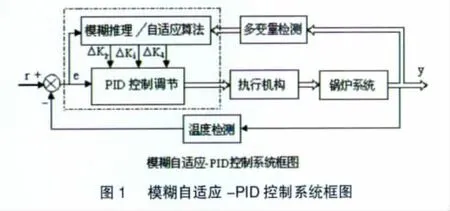
將模糊控制技術、自適應控制技術和PID控制技術結合起來,以偏差e和偏差變化率ec作為輸入變量,可以滿足不同時刻偏差e和偏差變化率ec對PID參數自整定的要求,結合對多項被控量的檢測,利用模糊理論和自適應算法在線對PID參數進行校正,便構成自整定模糊-PID控制器。這無疑可彌補單一控制技術的不足,為現代工業自動控制問題提供新的解決方案。具體結合方法如圖1所示。
2 模糊-自適應控制器的設計
通常,將模糊控制器輸入變量的個數稱為模糊控制器的維數。一般情況下,一維模糊控制器用于一階被控對象,由于這種控制器輸入變量只有一個誤差,它的動態控制性能不佳,因此目前被廣泛采用的均為二維模糊控制器,這種模糊控制器以誤差和誤差的變化率為輸入量,以控制量的變化為輸出變量。從理論上講,模糊控制器的維數越高,控制就越精細。但是維數越高,模糊控制規則變得過于復雜,控制算法的實現就會相當困難。
本文設計一個雙輸入三輸出的模糊控制器,選取系統偏差e和偏差變化率ec作為輸入變量,輸出量ΔKP、ΔKI和ΔKD,通過輸出來實時的整定PID的KP、KI和KD三個參數。
2.1 輸入/輸出變量的量化
設定偏差e的基本論域為[-14,14]。偏差變化率ec的基本論域為[-25,25],而控制量ΔKP、ΔKI、ΔKD的變化范圍根據實際鍋爐系統的容量、負荷確定;給定輸入變量的基本論域可以通過專家指導來確定,它在控制過程中往往是不變化的。偏差輸入變量 E 和 EC 的模糊論域為{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},輸出量是 PID 參數ΔKP、ΔKI和ΔKD,它們的模糊論域均為{-3,-2,-1,0,1,2,3}。
一般說來,論域的量化等級越細,控制精度也越高。但過細的量化等級將使算法復雜化。在確定了變量的基本論域和模糊集論域后,比例因子也就確定了。若用Ke和Kec表示偏差和偏差變化的量化因子,KP、KI、KD表示控制量的比例因子,e由量化因子Ke=6/14=0.429量化為E;ec由量化因子Kec=6/25=0.24 量化為 EC;KP、KI、KD的比例因子亦可算出。
2.2 輸入/輸出變量的模糊化
模糊化過程主要包括兩方面的工作。首先要建立輸入/輸出變量的模糊集,其次是對輸入/輸出變量選定隸屬函數。
模糊子集均為{NB,NM,NS,ZO,PS,PM,PB},其中,NB表示負大,NM表示負中,NS表示負小,ZO表示零,PS表示正小,PM表示正中,PB表示正大。
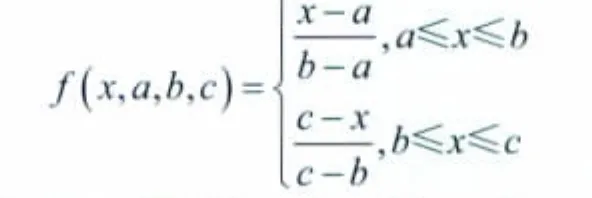
E、EC以及ΔKP、ΔKI和ΔKD的模糊隸屬度函數均選擇三角形隸屬度函數。其隸屬函數計算公式如下:
2.3 模糊控制器的控制規則的設計
模糊規則庫是根據PID三個參數KP、KI、KD和輸入偏差及偏差變化率之間的關系,結合工程設計人員的技術知識和實際操作經驗設計而成的,稱為IF-THEN規則,是模糊判決的依據。根據IF-THEN模糊推理規則,以E、EC為輸入,ΔKP、ΔKI、ΔKD為輸出,根據專家知識和有經驗的操作人員的經驗,總結出控制規則,可用模糊條件語句來描述。
2.4 模糊推理及模糊決策
系統采用Mamdani推理法,即先對兩個推理前件的隸屬度取小,作為推理后件隸屬度在語言變量區域取截集,把對應于當前輸入值的所有有效規則推理所得的控制量的模糊截集相“并”,然后根據重心法公式:

對輸出模糊量進行模糊判決,求得控制量。
根據以上方法,經過總結和歸納得到控制規則,計算出所有的控制量變化值,并寫成矩陣,從而得到模糊控制規則表。以上工作都是離線進行的,在求得控制表后,將其存放在計算機的內存中,并采用VB語言在上位機上編寫一個相應的查找控制表的子程序,來實現PID參數模糊自整定控制算法。
2.5 自適應控制方式的選擇
自適應控制主要有增益自調度型、模型參考自適應型和自校正控制型等幾種形式,考慮到模型參考自適應型和自校正控制型要求被控對象數學模型清晰,本系統難以實現;鍋爐系統的因數變化規律可以事先把握,則依據這些經驗知識設計的控制系統,對這個變化因素的適應能力可以做得更好,而且設計方法簡單,也并不需要更多的新的理論來支持,故選擇增益自調度型自適應控制。
3 結束語
本文以燃氣鍋爐系統為控制對象,介紹了自適應/模糊控制器的設計與實現方法。從仿真結果可看出自適應模糊控制器能適應對象參數、結構的變化,對象改變后,系統穩定性能較好。可見自適應模糊控制仍具有強的魯棒性,有更好的控制性能。采用自適應模糊算法結合PID控制,對鍋爐燃燒這一具有明顯大慣性和非線性特性,被控量時變性大、影響因素多的系統進行控制,取得了較好的控制效果。
[1] 王振臣.Lon Works總線與模糊PID控制在空調系統中的應用[J].工業控制計算機,2007,20(11):20-21.
[2] 邱黎輝.模糊PID控制在中央空調系統中的應用研究[J].計算機測量與控制,2004,12(1):57-59.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32