EGO算法的翼型氣動(dòng)外形優(yōu)化設(shè)計(jì)
2011-03-12 14:05:04侯成義
哈爾濱工業(yè)大學(xué)學(xué)報(bào) 2011年3期
侯成義
(西北工業(yè)大學(xué)國(guó)防科技研究院,710072西安,peggy.cao@163.com)
遺傳算法、粒子群算法等隨機(jī)優(yōu)化算法同基于梯度的優(yōu)化算法相比具有很強(qiáng)的全局性和魯棒性,然而這些隨機(jī)優(yōu)化算法進(jìn)行需要用CFD、FEM分析等耗時(shí)的目標(biāo)值評(píng)估的工程優(yōu)化時(shí),存在著計(jì)算量大的問題,嚴(yán)重制約了在工程中的應(yīng)用.用代理模型代替費(fèi)時(shí)的精確模型計(jì)算進(jìn)行優(yōu)化的方法得到了發(fā)展[1-2],常用的代理模型有多項(xiàng)式響應(yīng)面模型、人工神經(jīng)網(wǎng)絡(luò)模型、Kriging模型等.首先由一定數(shù)量的樣本構(gòu)造代理模型,用優(yōu)化算法搜索代理模型的最優(yōu)解并進(jìn)行精確模型校驗(yàn),進(jìn)而更新校驗(yàn)點(diǎn)到代理模型直至滿足收斂要求.由于代理模型的計(jì)算量比精確模型小得多,該方法可大幅度提高優(yōu)化效率,但是其優(yōu)化精度嚴(yán)重依賴于代理模型預(yù)測(cè)的能力,容易陷入局部最優(yōu)[3].M.Schonlau[4]提出的EGO(Efficient Global Optimization)算法在選取校驗(yàn)點(diǎn)時(shí)綜合考慮了代理模型的預(yù)測(cè)值和預(yù)測(cè)精度,有效避免了陷入局部最優(yōu)的風(fēng)險(xiǎn),該方法在工程優(yōu)化中得到了應(yīng)用[5-6].
本文采用拉丁超立方實(shí)驗(yàn)設(shè)計(jì)方法產(chǎn)生樣本點(diǎn),用EI(Expected Improvement)最優(yōu)策略綜合評(píng)價(jià)由Kriging代理模型獲取的預(yù)測(cè)適應(yīng)值及預(yù)測(cè)精度,并結(jié)合響應(yīng)最優(yōu)策略,用粒子群算法搜索最優(yōu)校驗(yàn)點(diǎn),結(jié)合Hicks-Henne型函數(shù)翼型參數(shù)化方法與雷諾平均N-S方程流場(chǎng)求解器進(jìn)行了翼型優(yōu)化設(shè)計(jì).
1 優(yōu)化系統(tǒng)
1.1 試驗(yàn)設(shè)計(jì)方法
選取合理分布的樣本點(diǎn)對(duì)構(gòu)造代理模型具有重要的影響,一般要求有限的樣本應(yīng)該盡可能全面的反映設(shè)計(jì)空間的特性.常用的實(shí)驗(yàn)設(shè)計(jì)方法有全析因設(shè)計(jì)、正交設(shè)計(jì)、均勻設(shè)計(jì)等,本文采用了拉丁超立方設(shè)計(jì)方法產(chǎn)生樣本點(diǎn).
1.2 粒子群優(yōu)化算法
粒子群優(yōu)化算法(Particle Swarm Optimization)[7]是一種模擬鳥群覓食行為的群體智能算法,該算法實(shí)現(xiàn)簡(jiǎn)單,參數(shù)設(shè)置方便,收斂速度快,能有效解決復(fù)雜優(yōu)化問題.該算法以“粒子”作為個(gè)體,按照設(shè)定的規(guī)則進(jìn)行群體的協(xié)作從而進(jìn)行有效的搜索.首先隨機(jī)初始化粒子種群位置和初速度,每個(gè)粒子通過跟蹤自身所找的個(gè)體最優(yōu)粒子pbest以及整個(gè)種群找到的全局最優(yōu)粒子gbest,在粒子當(dāng)前速度、pbest和gbest的位置的共同引導(dǎo)下,粒子在下一個(gè)時(shí)刻將飛行到新的位置.粒子的速度和位置更新公式分別為

式中:d=1,2,…,n(n為搜索空間維數(shù));i=1,2,…,m(m為種群規(guī)模);t為當(dāng)前進(jìn)化代數(shù);分別為對(duì)應(yīng)粒子的歷史最優(yōu)位置和全局最優(yōu)位置;c1,c2分別為學(xué)習(xí)因子;R1,R2分別為(0,1)的隨機(jī)數(shù);ω為慣性權(quán)重因子,慣性權(quán)重因子決定了粒子先前速度對(duì)當(dāng)前速度的影響程度.Shi Y采用隨迭代進(jìn)行慣性權(quán)重因子減小的方法,在優(yōu)化初期提高全局搜索能力,而在后期加速收斂.
1.3 Kriging代理模型
Kriging代理模型[8]起源于地理空間統(tǒng)計(jì)學(xué),是一種估計(jì)方差最小的無偏估計(jì)模型,通過相關(guān)函數(shù)的作用,具有局部估計(jì)的特點(diǎn),它可以較好的預(yù)估未知點(diǎn)處函數(shù)值的分布情況.Kriging模型假設(shè)目標(biāo)函數(shù)值與設(shè)計(jì)變量之間的真實(shí)關(guān)系可以寫為

式中:f(x)為回歸模型,是對(duì)設(shè)計(jì)空間的全局近似,為確定性部分,可以一個(gè)常數(shù)β表示;Z(x)為均值為0,方差為σ2的統(tǒng)計(jì)過程,表示對(duì)全局近似的背離,2個(gè)插值點(diǎn)的協(xié)方差為

式中R為點(diǎn)x(i)和x(j)的相關(guān)函數(shù),可用高斯函數(shù)表示為

未知點(diǎn)x0處的預(yù)測(cè)值^y(x0)和方差估計(jì)值^σ通過下列形式給出:
可以通過極大似然估計(jì)確定相關(guān)參數(shù)θk為

1.4 EGO算法
選擇代理模型預(yù)測(cè)值的最優(yōu)點(diǎn)作為校驗(yàn)點(diǎn)的方法稱為響應(yīng)最優(yōu)策略.但是代理模型的預(yù)測(cè)精度總是有限的,如果代理模型在真實(shí)的最優(yōu)解處預(yù)測(cè)精度較差,就有可能在選擇校驗(yàn)點(diǎn)時(shí)總是無法搜索到該區(qū)域,使得優(yōu)化陷入局部最優(yōu).因此在選擇校驗(yàn)點(diǎn)時(shí)有必要綜合考慮Kriging模型獲取的預(yù)測(cè)適應(yīng)值及預(yù)測(cè)精度.本文采用了EI(Expected Improvement)方法,根據(jù)下式確定個(gè)體的EI值,EI值越大說明該個(gè)體越需要校正.

式中:fmin為樣本點(diǎn)中最小適應(yīng)值;^y為預(yù)測(cè)適應(yīng)值為預(yù)測(cè)標(biāo)準(zhǔn)差;Φ,Ψ分別為標(biāo)準(zhǔn)正態(tài)分布和標(biāo)準(zhǔn)正態(tài)分布密度函數(shù).當(dāng)個(gè)體預(yù)測(cè)值越小,預(yù)測(cè)標(biāo)準(zhǔn)差越大,則個(gè)體的EI值越大,個(gè)體越需要校正.
1.5 優(yōu)化流程
本文在選擇校驗(yàn)點(diǎn)時(shí),一部分校驗(yàn)點(diǎn)用響應(yīng)最優(yōu)策略選擇,另一部分采用EI最優(yōu)策略,2種方法交替進(jìn)行.優(yōu)化流程為:
1)由拉丁超立方設(shè)計(jì)方法在設(shè)計(jì)空間內(nèi)生成一定數(shù)量的樣本.
2)由樣本點(diǎn)構(gòu)建Kriging代理模型.
3)確定是采用響應(yīng)最優(yōu)策略還是EI最優(yōu)策略,基于粒子群算法優(yōu)化選擇最優(yōu)響應(yīng)或最優(yōu)EI校驗(yàn)點(diǎn).
4)判斷是否滿足收斂條件,如果滿足則退出,不滿足則執(zhí)行步驟5).
5)將校驗(yàn)點(diǎn)加入樣本,執(zhí)行步驟2).
2 翼型氣動(dòng)優(yōu)化設(shè)計(jì)
翼型參數(shù)化方法采用的是Hicks-Henne型函數(shù)法[9],新翼型由基本翼型的上表面或下表面加擾動(dòng)構(gòu)成,表達(dá)為
式中n為控制上表面或下表面變量的個(gè)數(shù),本文選取n為7,即共計(jì)14個(gè)設(shè)計(jì)變量.
本文以RAE2822翼型為初始翼型進(jìn)行翼型氣動(dòng)優(yōu)化設(shè)計(jì)研究.采用雷諾平均N-S方程求解繞翼型流場(chǎng),湍流模型為k-ω SST模型.設(shè)計(jì)狀態(tài)為巡航馬赫數(shù)0.73,雷諾數(shù)6.5E6,設(shè)計(jì)升力系數(shù)0.74,約束條件為最大相對(duì)厚度不減,低頭力矩特性不差于初始翼型,優(yōu)化目標(biāo)為降低阻力系數(shù).
由拉丁超立方設(shè)計(jì)方法產(chǎn)生120個(gè)翼型作為代理模型初始樣本點(diǎn),校驗(yàn)次數(shù)為240,EI最優(yōu)策略進(jìn)行2次后響應(yīng)最優(yōu)策略進(jìn)行1次,如此交替進(jìn)行,即分別進(jìn)行160次和80次,PSO的種群規(guī)模為30,迭代步數(shù)為60.為了比較本文優(yōu)化方法,還采用響應(yīng)最優(yōu)法和粒子群算法進(jìn)行翼型優(yōu)化,其中響應(yīng)最優(yōu)法初始樣本數(shù)為120,校驗(yàn)次數(shù)為240,而粒子群算法種群規(guī)模為30,迭代步數(shù)為40,設(shè)計(jì)結(jié)果如表1所示.單純的響應(yīng)最優(yōu)法優(yōu)化陷入局部最優(yōu),其他2種方法得到了相似的優(yōu)化結(jié)果,阻力降低了22.4%,粒子群算法用了1 200次流場(chǎng)計(jì)算,而本文方法僅用360次.圖1和圖2分別為本文方法優(yōu)化前后翼型形狀和壓力分布,與初始翼型相比,設(shè)計(jì)翼型翼型完全消除了激波,阻力系數(shù)降低了0.003 4,而翼型最大相對(duì)厚度沒有降低.設(shè)計(jì)翼型整體彎度降低,而通過增加后加載來保持升力系數(shù).同時(shí)設(shè)計(jì)翼型增加了前加載和頭部上表面吸力峰值,一方面增加了翼型升力,另一方面抵消了后加載所附加的低頭力矩,使設(shè)計(jì)翼型保持著良好的低頭力矩特性.
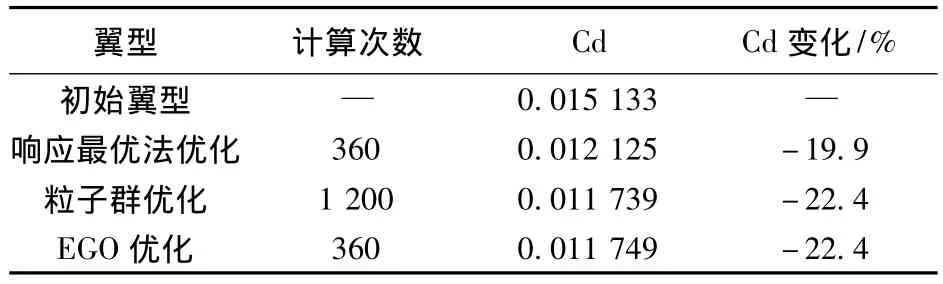
表1 不同優(yōu)化方法計(jì)算次數(shù)及優(yōu)化結(jié)果對(duì)比
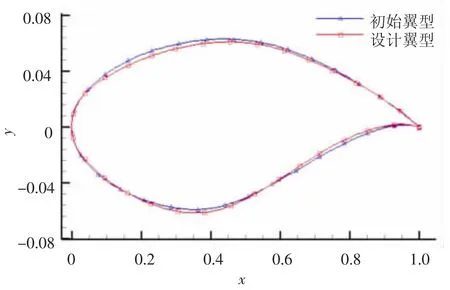
圖1 設(shè)計(jì)翼型與初始翼型形狀
雖然構(gòu)造Kriging模型以及預(yù)測(cè)氣動(dòng)力需要耗費(fèi)一定時(shí)間,但是與調(diào)用氣動(dòng)力計(jì)算的耗時(shí)相比要小得多,上文算例優(yōu)化耗時(shí)約比粒子群算法減少68%.
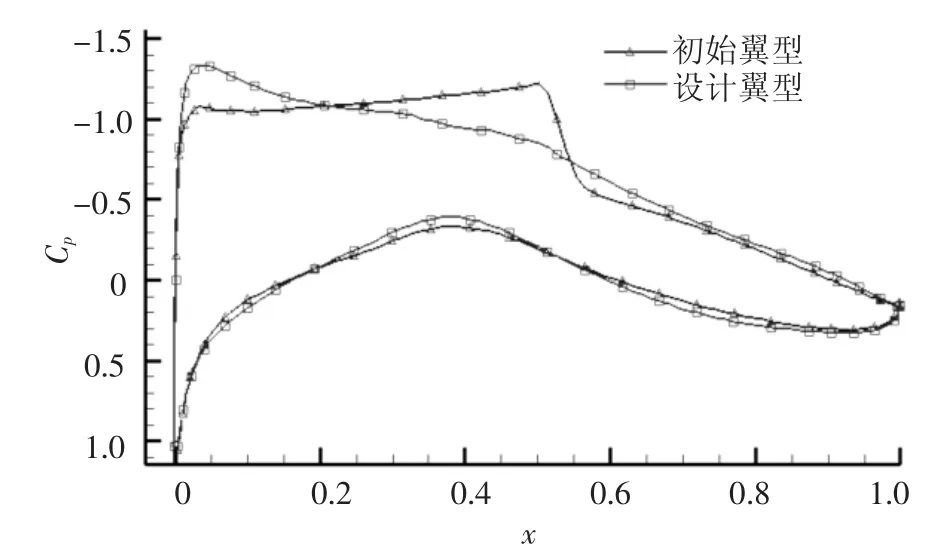
圖2 設(shè)計(jì)翼型與初始翼型壓力分布
3 結(jié)論
1)本文構(gòu)建了將Kriging代理模型和粒子群算法相結(jié)合的高效優(yōu)化系統(tǒng),采用粒子群算法搜索由EI最優(yōu)策略和響應(yīng)最優(yōu)策略交替選擇的最優(yōu)校驗(yàn)點(diǎn),前者綜合考慮代理模型的預(yù)測(cè)值及預(yù)測(cè)精度,可以有效避免陷入局部最優(yōu),后者可以促使快速收斂.
2)翼型優(yōu)化設(shè)計(jì)算例表明本文方法克服了響應(yīng)最優(yōu)法容易陷入局部最優(yōu)的缺點(diǎn),保證優(yōu)化精度,同時(shí)又有效地減少了計(jì)算量,大大提高了翼型氣動(dòng)優(yōu)化設(shè)計(jì)的工程實(shí)用性.
[1]DUVIGNEAU R,VISONNEAU M.Hybrid genetic algorithms and neural networks for fast CFD-based design[R].Atlanta:AIAA 2002-5465,2002.
[2]RAJAGOPAL S,GANGULI R.Multidisciplinary design optimization of an UAV wing using kriging based multi-objective genetic algorithm[R].AIAA 2009-2219,2009.
[3]JONES D L.A taxonomy of global optimization methods based on response surfaces[J].Journal of Global Optimization,2001,21(4):345-383.
[4]SCHONLAU M.Computer experiments and global optimization[D].Ontario Canada:Waterloo,1997.
[5]王紅濤,竺曉程,杜朝輝.基于Kriging代理模型的改進(jìn)EGO算法研究[J].工程設(shè)計(jì)學(xué)報(bào),2009,16(4): 266-270.
[6]蘇偉,高正紅,夏露.一種代理遺傳算法及其在氣動(dòng)優(yōu)化設(shè)計(jì)中的應(yīng)用[J].西北工業(yè)大學(xué)學(xué)報(bào),2008,26(3):303-307.
[7]KENNEDY J,EBERHART R C.Particle swarm optimization[C]//Proceedings of IEEE International Conference on Neural Networks.Washington,DC:IEEE Service Center,1995:1942-1948.
[8]CRESSIE N A C.Statistics for spatial data[M].New York:John Wiley&Sons,1993.
[9]HICKS R M,HENNE P A.Wing design by numerical optimization[J].Journal of Aircraft,1978,15(7): 407-413.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
意林原創(chuàng)版(2016年10期)2016-11-25 10:28:30
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
