mN級(jí)推力架靜態(tài)特性及推力測(cè)量不確定度分析①
2011-03-13 11:55:32施陳波湯海濱張莘艾秦超晉曹熙煒
固體火箭技術(shù) 2011年3期
關(guān)鍵詞:測(cè)量
施陳波,湯海濱,張莘艾,秦超晉,曹熙煒
(北京航空航天大學(xué)宇航學(xué)院,北京 100191)
0 引言
微小推力器研究與應(yīng)用離不開準(zhǔn)確的推力測(cè)量,靜態(tài)標(biāo)定是檢驗(yàn)推力架性能的重要手段,推力架靜態(tài)特性是評(píng)述推力測(cè)量方法的關(guān)鍵指標(biāo),表明測(cè)量結(jié)果的可信程度。目前,推力測(cè)量文獻(xiàn)中所述的標(biāo)定,只是確定推力架輸入輸出關(guān)系,而非真正意義上的靜態(tài)標(biāo)定[1-4]。本文使用砝碼對(duì) mN級(jí)推力架進(jìn)行靜態(tài)標(biāo)定,得到推力架的靜態(tài)特性,證明了電磁力反饋法測(cè)量mN級(jí)推力是可行的。
推力測(cè)量值的不確定度是對(duì)推力測(cè)量值質(zhì)量的定量表征,反映推力測(cè)量值的可信程度。不確定度是推力測(cè)量結(jié)果的重要組成部分,同時(shí)可觀察到各種因素對(duì)推力測(cè)量的影響。推力測(cè)量文獻(xiàn)中,多對(duì)影響推力測(cè)量的因素進(jìn)行分析,但缺少對(duì)不確定度系統(tǒng)的評(píng)定[5-7]。本文使用mN級(jí)推力架進(jìn)行冷氣推力器推力測(cè)量過程中主要影響因素的分析,并對(duì)推力測(cè)量值的不確定度進(jìn)行了計(jì)算,完善了推力測(cè)量結(jié)果。
1 推力架及標(biāo)定方法
1.1 推力架
mN級(jí)推力架分為機(jī)械結(jié)構(gòu)和控制部分。機(jī)械部分主要由無摩擦的彈性軸、安裝有發(fā)動(dòng)機(jī)能繞彈性軸轉(zhuǎn)動(dòng)的動(dòng)架以及安裝有位移傳感器和電磁線圈的靜架組成,如圖1所示。
控制部分主體是一個(gè)PID控制電路,PID控制電路由運(yùn)算放大器搭建。PID控制用來保證反饋的電磁力產(chǎn)生的力矩始終與推力器推力力矩平衡。圖2為推力架的閉環(huán)控制回路簡圖。
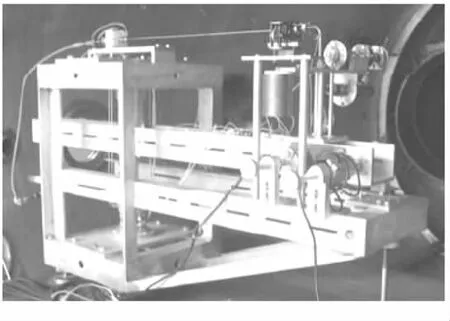
圖1 推力架機(jī)械結(jié)構(gòu)圖Fig.1 Structure diagram of thrust stand
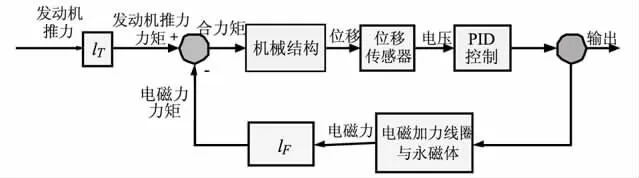
圖2 推力架閉環(huán)控制回路Fig.2 Closed loop control circuit of thrust stand
電磁線圈中的電流通過25 Ω電阻轉(zhuǎn)換為電壓信號(hào),這個(gè)電壓信號(hào)就是推力架推力輸出信號(hào)。推力輸出與推力關(guān)系通過砝碼靜態(tài)標(biāo)定得到。
1.2 推力架靜態(tài)標(biāo)定方法
靜態(tài)標(biāo)定是檢驗(yàn)推力架性能的重要手段,靜態(tài)標(biāo)定得到的推力架靜態(tài)特性指標(biāo)是評(píng)定推力測(cè)量結(jié)果的主要依據(jù)。mN級(jí)推力架使用M2等級(jí)的砝碼進(jìn)行靜態(tài)標(biāo)定,原理如圖3所示。
漁線直徑為0.6 mm,一端連接于推力器中心,經(jīng)過一個(gè)摩擦很小的滑輪后,漁線的另一端懸掛標(biāo)定所用的砝碼。
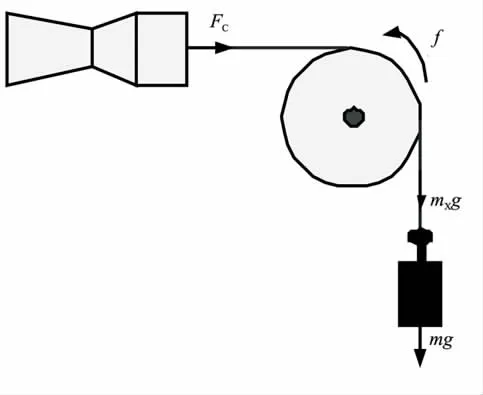
圖3 砝碼標(biāo)定原理圖Fig.3 Principle diagram of weight calibration
砝碼產(chǎn)生的標(biāo)定力為

式中 mg為標(biāo)定砝碼產(chǎn)生的重力;mxg為該段漁線產(chǎn)生的重力;f為漁線與滑輪之間的摩擦力。
標(biāo)定過程中,通過加載不同砝碼,施加不同的標(biāo)定力。測(cè)量不同標(biāo)定力下推力架輸出信號(hào),得到標(biāo)定曲線,完成標(biāo)定工作。
1.3 標(biāo)定方法誤差分析
受試驗(yàn)條件限制,標(biāo)定方法本身也會(huì)存在誤差,并直接決定了推力架推力測(cè)量能達(dá)到的最高精度。使用砝碼對(duì)mN級(jí)推力架進(jìn)行靜態(tài)標(biāo)定存在的方法誤差主要來自于4個(gè)方面:
(1)砝碼精度帶來的誤差。推力架靜態(tài)標(biāo)定所用的砝碼精度等級(jí)為M2級(jí),使用了1、2、5 g 3種砝碼,由砝碼精度帶來的最大誤差為0.5%[8]。
(2)砝碼標(biāo)定時(shí)漁線方向與發(fā)動(dòng)機(jī)推力方向不共軸帶來的誤差。靜態(tài)標(biāo)定時(shí),肉眼能保證兩者的夾角小于5°,由此使砝碼實(shí)際產(chǎn)生的標(biāo)定力偏小0.38%。由漁線方向與發(fā)動(dòng)機(jī)推力軸線方向不共軸帶來的推力測(cè)量誤差是恒定偏大的,導(dǎo)致測(cè)量得到的推力比發(fā)動(dòng)機(jī)實(shí)際產(chǎn)生的推力大0.38%。
(3)砝碼標(biāo)定時(shí)漁線質(zhì)量帶來的誤差。漁線強(qiáng)度高、質(zhì)量輕,因此標(biāo)定時(shí),選用漁線作為連接線。使用電子天平稱量20 cm長的漁線,發(fā)現(xiàn)質(zhì)量小于0.01 g,標(biāo)定中實(shí)際使用的漁線長度小于20 cm。因此,忽略漁線質(zhì)量帶來的影響。
(4)砝碼標(biāo)定時(shí)漁線和滑輪摩擦帶來的誤差。砝碼標(biāo)定時(shí),漁線與滑輪接觸存在摩擦。測(cè)量得到砝碼標(biāo)定時(shí)漁線和滑輪間摩擦力為所加砝碼重力的0.3%[9]。
因此,由標(biāo)定方法帶來的誤差小于1.18%,標(biāo)定方法誤差直接導(dǎo)致推力架的靈敏度誤差,從而導(dǎo)致測(cè)量值的誤差。
2 推力架靜態(tài)特性分析
2.1 推力架靜態(tài)特性分析
為了使推力測(cè)量結(jié)果具有普遍的科學(xué)意義,使用砝碼靜態(tài)標(biāo)定對(duì)mN級(jí)推力架進(jìn)行檢驗(yàn)。通過砝碼靜態(tài)標(biāo)定,得到mN推力架的靜態(tài)特性指標(biāo),從而為推力測(cè)量結(jié)果的不確定度分析提供了基礎(chǔ)。砝碼靜態(tài)標(biāo)定的數(shù)據(jù)見表1。
(1)靈敏度
表1中,第1組數(shù)據(jù)正行程和反行程的推力輸出和推力關(guān)系如圖4所示,重力加速度取為9.83 m/s2。對(duì)圖4中數(shù)據(jù)按照等式Tso=K·T進(jìn)行線性擬合,得到推力輸出Tso與推力T關(guān)系曲線的系數(shù)K為9.98 mV/mN,即此時(shí)推力架的靈敏度為9.98 mV/mN。
電磁線圈、永磁體的選用以及電磁線圈和永磁體之間間距的改變,都會(huì)影響到推力架的靈敏度。因此, 每次推力測(cè)量前都應(yīng)進(jìn)行靜態(tài)標(biāo)定。
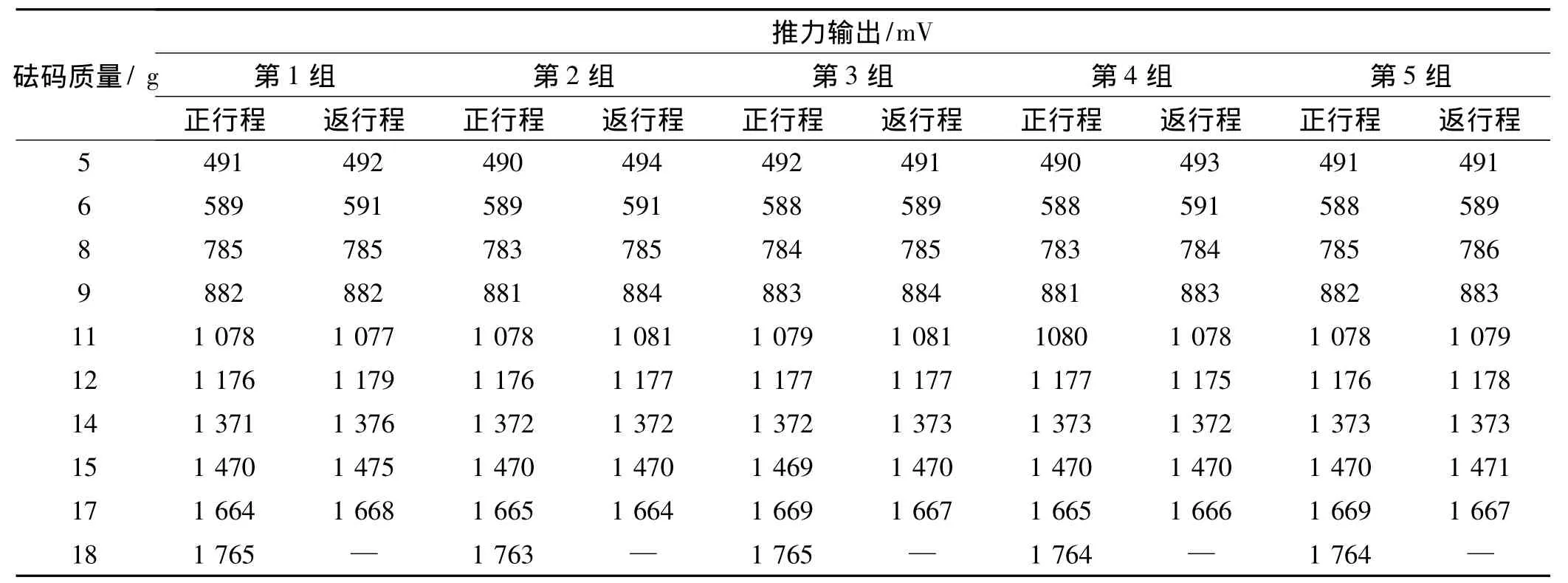
表1 mN級(jí)推力架靜態(tài)標(biāo)定數(shù)據(jù)Table 1 Static calibration data of mN magnitude-order thrust stand
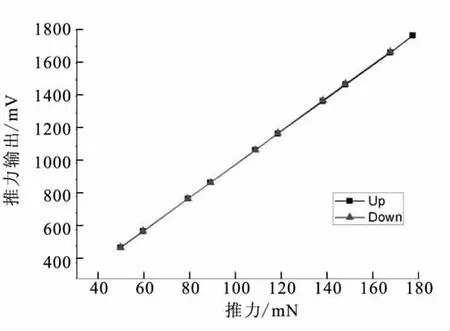
圖4 推力輸出與推力關(guān)系圖Fig.4 Relationship of thrust output vs thrust
(2)線性度
使用擬合得到理想推力輸出與推力關(guān)系曲線,來論證靜態(tài)標(biāo)定中的線性度。mN級(jí)推力架線性誤差[10]:

式中 △Lmax為推力輸出與理想推力輸出的最大偏差,△Lmax=4 mV;Fso為滿量程推力輸出1 966 mV。
(3)遲滯性
遲滯誤差:

式中 △Hmax為推力輸出的最大遲滯誤差,△Hmax=5 mV。
(4)重復(fù)性
重復(fù)性誤差:

式中 △Rmax為重復(fù)性試驗(yàn)中出現(xiàn)的最大偏差,△Rmax=5 mV。
(5)量程
因?yàn)闃?biāo)定所用標(biāo)準(zhǔn)砝碼數(shù)量的限制,表1中數(shù)據(jù)只論證了推力量程50~180 mN內(nèi)推力架的靜態(tài)特性。為了擴(kuò)展推力架推力測(cè)量量程,對(duì)10~50 mN進(jìn)行靜態(tài)標(biāo)定,得到最大線性偏差為2 mV,最大遲滯偏差為3 mV,最大重復(fù)偏差為3 mV,均小于50~180 mN量程內(nèi)相應(yīng)數(shù)據(jù)。因此,得到推力架靜態(tài)特性指標(biāo)能在推力架200 mN量程10%~90%的測(cè)量范圍內(nèi)使用。
(6)分辨率
推力架輸出為模擬信號(hào),理論上推力架的分辨率為無窮小。推力架分辨率實(shí)際受到位移傳感器分辨率、泵振動(dòng)等其他影響因素的限制。位移傳感器分辨率為0.3 μm,對(duì)應(yīng)力的大小約為 0.01 mN。因此,推力架的分辨率不可能優(yōu)于0.01 mN。試驗(yàn)中觀察到,在泵振動(dòng)的外界因素影響下,推力輸出的平均值總能穩(wěn)定于1 mV的水平,對(duì)應(yīng)于推力約為0.1 mN。因此,認(rèn)為推力架的分辨率為0.1 mN。
(7)漂移
mN級(jí)推力架測(cè)量穩(wěn)定性試驗(yàn)在真空艙中進(jìn)行,但泵未啟動(dòng),試驗(yàn)狀態(tài)為大氣。對(duì)推力架掛載10 g砝碼,在超過90 min的時(shí)間內(nèi),推力架推力輸出的變化小于1.5 mV。因此認(rèn)為推力架推力輸出的穩(wěn)定性指標(biāo)小于(等于)1 mV/h或小于(等于)0.3 mN/h。
推力架靜態(tài)特性的指標(biāo)列于表2中。
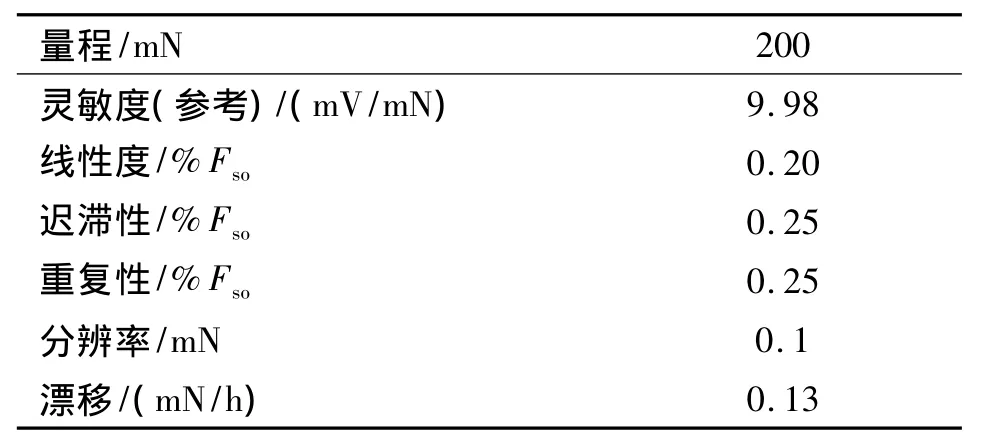
表2 推力架靜態(tài)特性指標(biāo)Table 2 Static characteristics index of thrust stand
2.2 三點(diǎn)標(biāo)定可行性分析
mN級(jí)推力架靈敏度會(huì)因?yàn)殡姶啪€圈、永磁體的選用或電磁線圈和永磁體之間間距的改變而發(fā)生變化。因此,每一次推力測(cè)量前,需重新標(biāo)定得到推力架的靈敏度。在滿足測(cè)量要求的情況下,只掛載5、10、20 g 3個(gè)砝碼,通過對(duì)推力輸出與推力關(guān)系進(jìn)行線性擬合得到推力架的靈敏度。下面論證三點(diǎn)標(biāo)定對(duì)推力測(cè)量帶來的影響。使用5、10、20 g 3個(gè)砝碼進(jìn)行標(biāo)定時(shí)推力架推力輸出的3組數(shù)據(jù)如表3所示。
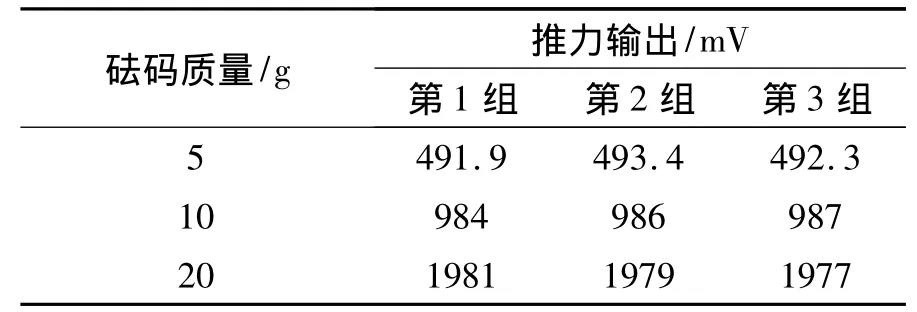
表3 三點(diǎn)標(biāo)定數(shù)據(jù)Table 3 Three-points calibration data
對(duì)表3中的數(shù)據(jù)進(jìn)行線性擬合,得到3組數(shù)據(jù)推力輸出與推力的關(guān)系曲線的系數(shù)K分別為10.06、10.06、10.05,與靜態(tài)標(biāo)定得到的值 9.98 的最大偏差為0.08,相當(dāng)于靜態(tài)標(biāo)定值的0.80%。線性擬合得到的校正決定系數(shù)都非常接近1,表明三點(diǎn)標(biāo)定的數(shù)據(jù)同樣滿足線性關(guān)系。因此,在試驗(yàn)精度允許的情況下,可使用三點(diǎn)進(jìn)行標(biāo)定,由此帶來的誤差為0.80%。
3 冷氣推力器推力測(cè)量不確定度分析
3.1 測(cè)量環(huán)境及冷氣推力器介紹
使用mN級(jí)推力架測(cè)量冷氣推力器推力的試驗(yàn)在北京航空航天大學(xué)電推進(jìn)實(shí)驗(yàn)室直徑為1.8 m的真空艙中進(jìn)行,真空艙配備4臺(tái)旋片機(jī)械真空泵、2臺(tái)羅茨泵和2臺(tái)高真空油擴(kuò)散泵。冷氣推力測(cè)量試驗(yàn)時(shí),只啟動(dòng)旋片機(jī)械真空泵及羅茨泵,真空油擴(kuò)散泵沒有啟動(dòng),試驗(yàn)時(shí)動(dòng)態(tài)真空度約為18 Pa。
待測(cè)推力的冷氣推力器喉部直徑0.6 mm,擴(kuò)張段為錐形設(shè)計(jì),擴(kuò)張比為25。
3.2 冷氣推力器推力測(cè)量數(shù)據(jù)
推力架靈敏度的標(biāo)定在抽真空前完成,靈敏度為11.31 mV/mN。冷氣推力器推力測(cè)量試驗(yàn)中,使用流量控制器控制調(diào)節(jié)氮?dú)饬髁俊T纪屏敵鰯?shù)據(jù)如圖5所示,并對(duì)原始數(shù)據(jù)進(jìn)行5 Hz低通濾波。
推力測(cè)量前后推力輸出零位變化了15.6 mV,對(duì)應(yīng)推力變化了1.4 mN。推力輸出零位的漂移主要由推進(jìn)劑供給管路施加的力的改變引起的,泵的振動(dòng)、泵抽氣的擾動(dòng)、發(fā)動(dòng)機(jī)工作帶來的動(dòng)架擺動(dòng),均可能會(huì)導(dǎo)致推進(jìn)劑供給管路施加力的改變。
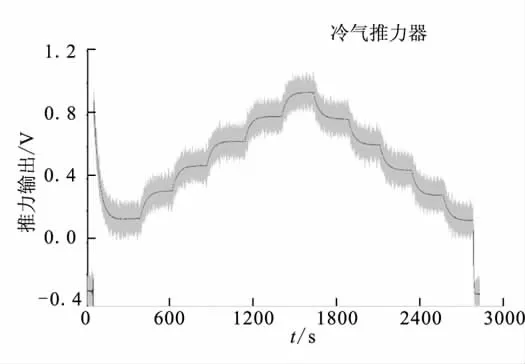
圖5 推力輸出數(shù)據(jù)Fig.5 Thrust output data
3.3 測(cè)量不確定的來源
影響冷氣推力器推力測(cè)量的不確定度主要因素有:標(biāo)定方法誤差帶來的不確定度μ1;推力架靜態(tài)特性帶來不確定度μ2;砝碼三點(diǎn)標(biāo)定誤差帶來的不確定度μ3;推力測(cè)量過程中,推力架推力輸出零位漂移帶來的不確定度μ4。不確定度μ1~μ4均采用B類評(píng)定方法。
3.4 不確定度的評(píng)定
以冷氣推力器推力測(cè)量第1組數(shù)據(jù),氮?dú)饬髁繛?.86 SLM時(shí)的推力值40.3 mN為例,進(jìn)行不確定度分析。
(1)標(biāo)定方法誤差帶來的不確定度μ1
標(biāo)定方法誤差導(dǎo)致每一個(gè)測(cè)量值誤差為1.18%,對(duì)于測(cè)量得到的推力值 40.3 mN,不確定度 μ1=40.3 mN ×1.18%=0.48 mN。
(2)推力架靜態(tài)特性帶來不確定度μ2
推力架靜態(tài)特性帶來不確定度μ2=200 mN×
(3)砝碼三點(diǎn)標(biāo)定誤差帶來的不確定度μ3
使用砝碼進(jìn)行三點(diǎn)標(biāo)定,會(huì)對(duì)每一個(gè)測(cè)量值帶來0.80%的誤差。因此,不確定度 μ3=40.3 mN×0.80%=0.32 mN。
(4)推力測(cè)量過程中推力架推力輸出零位漂移帶來的不確定度μ4
冷氣推力器推力測(cè)量過程中零位漂移了1.4 mN,使用界限不對(duì)稱的不確定度評(píng)定方法,得到不確定度
3.5 不確定度的合成
不確定度μ1~μ4相互獨(dú)立,得到合成不確定度μc
3.6 擴(kuò)展不確定度計(jì)算
取包含因子k=2,置信概率約為0.95,測(cè)量到推力測(cè)量值40.3 mN的擴(kuò)展不確定度 。
使用同樣的分析方法,得到冷氣推力器推力測(cè)量值的擴(kuò)展不確定度置于表4中。
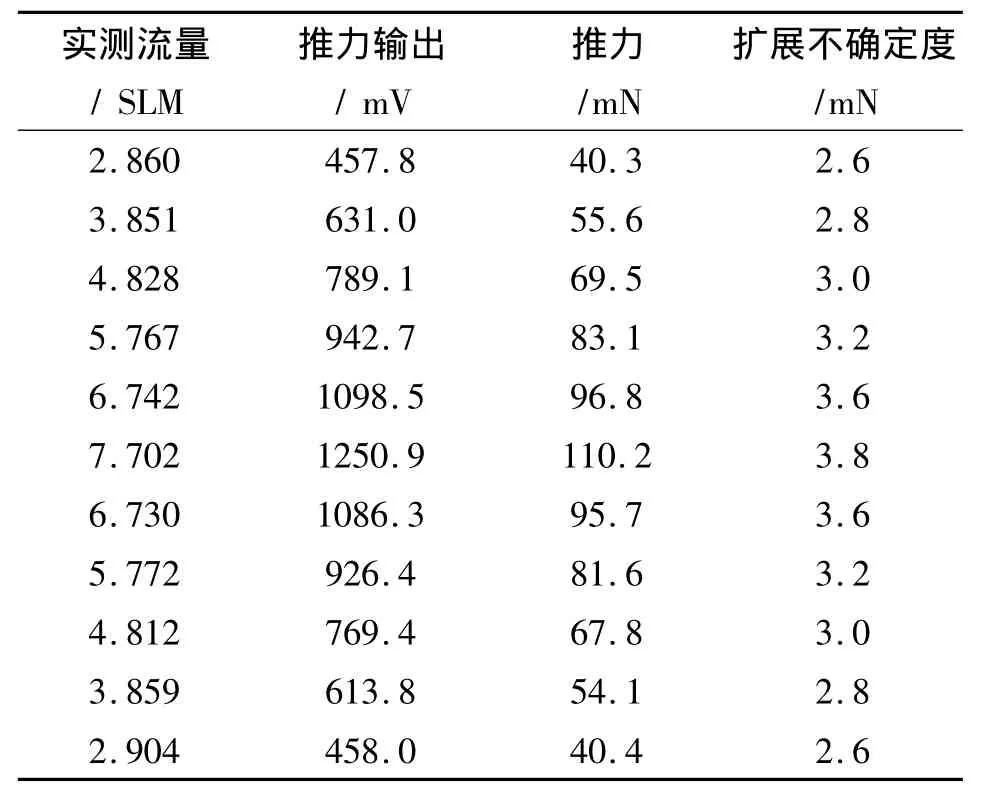
表4 冷氣推力器推力測(cè)量結(jié)果Table 4 Thrust measurement results of cold gas thruster
4 結(jié)論
(1)mN級(jí)推力架在進(jìn)行靜態(tài)標(biāo)定前,先對(duì)砝碼標(biāo)定的方法進(jìn)行了介紹,并對(duì)影響標(biāo)定精度的因素進(jìn)行了分析,包括砝碼精度、力方向不共軸、漁線和滑輪的摩擦等。
(2)通過靜態(tài)標(biāo)定對(duì)推力架的性能進(jìn)行評(píng)估,得到推力架靜態(tài)特性的主要指標(biāo)有測(cè)量范圍為10~200 mN,靈敏度為9.98 mV/mN,分辨率為0.1 mN,線性度誤差為 0.20%Fso,滯后性誤差為 0.25%Fso,重復(fù)性誤差為0.25%Fso,長時(shí)穩(wěn)定性為推力輸出小于1 mV/h。
(3)使用mN級(jí)推力架對(duì)冷氣推力器進(jìn)行實(shí)際推力測(cè)量,并對(duì)推力測(cè)量數(shù)據(jù)進(jìn)行了不確定度分析和計(jì)算,使得推力測(cè)量結(jié)果完整。通過不確定度分析可知,影響推力測(cè)量不確定度的因素主要是標(biāo)定方法、推力架靜態(tài)特性和推力輸出的零位漂移。
[1]Vlad Hruby,D Spence,N Denmons,et al.ST7-DRS colloid thruster system development and performance summary[R].AIAA 2008-4824.
[2]Cassady L D,Kodys A,Choueiriz E.A thrust stand for high-power steady-state plasma thrusters[R].AIAA 2002-4118.
[3]Markusi T E,Jones J,Cox M.Thrust stand for electric propulsion performance evaluation[R].AIAA 2004-3441.
[4]Nicolini D,Chesta E,Gonzalez J,del Amo,et al.FEEP-5 thrust validation in the 10 ~ 100 μN(yùn) range with a simple nulled-pendulum thrust stand:integration procedures[R].IEPC 01-288.
[5]Cubbin E A,Ziemer J,Choueiri E,et al.Pulsed thrust measurements using laser interferometry[J].Rev.Sci.Instrum.,1997,68(6):2339-2346.
[6]Lake P,Carallaro G,Spanjers G.Resonant operation of a micro-newton thrust stand[R].AIAA 2002-3821.
[7]Ziemer J K.Performance measurements using a sub-micronewton resolution thrust stand[R].IEPC 01-238.
[8]孫瑞嫻.砝碼[M].北京:中國計(jì)量出版社,1992.
[9]Sun Ruixian.Weights[M].Beijing:China Metrology Publishing House,1992(in Chinse).
[10]湯海濱,劉暢,向民,等.微推力全彈性測(cè)量裝置[J].推進(jìn)技術(shù),2007,28(6):703-706.
[11]Tang Haibin,Liu Chang,Xiang Min,et al.Full elastic micro-thrust measurement equipment[J].Journal of Propulsion Technology,2007,28(6):703-706(in Chinese).
[12]孔德仁,朱蘊(yùn)璞,狄長安.工程測(cè)試技術(shù)[M].北京:科學(xué)出版社,2009:47-54.
[13]Kong Deren,Zhu Wenpu,Di Changan.Engineering test technology[M].Beijing:Science Press,2009:47-54(in Chinese).
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00
