高精度空間相機像移補償機構設計與試驗
2011-03-16 07:42:34谷松王紹舉金光
長春理工大學學報(自然科學版) 2011年2期
谷松,王紹舉,金光
(中國科學院 長春光學精密機械與物理研究所,長春 130033)
高分辨率TDICCD空間相機對地推掃成像時,由于受衛星飛行速度、地球自轉速度等因素的影響,地物在相機像面產生的像移速度將會與 TDI CCD 列的方向產生一定的傾斜角,即偏流角[1]。偏流角的存在會使圖像邊緣模糊,灰度失真,對比度和分辨率均下降[2]。為了降低像移對成像質量的影響,以獲得清晰的圖像,需要將TDI CCD列的方向調整到與像移速度的方向一致,使TDICCD沿列的累積積分過程中完成轉移速度與地物像移速度的匹配,這一過程稱為像移補償。完成像移匹配可通過像移補償技術來實現。一般情況下,像移會在兩個正交方向上產生分量,一個是飛行器飛行方向上產生的前向像移分量,另一個是在飛行器飛行的垂直方向上產生的橫向像移分量,即由偏流角產生的像移分量。進行像移補償時,首先通過調整偏流角消除橫向像移分量,然后再通過補償前向像移達到清晰成像的目的[3]。因此,需要設置像移補償機構[4-7]。傳統的像移補償機構體積大、質量重,不適合當今空間相機小型化,輕量化的發展趨勢。本文針對此問題設計了一套精度高、體積小、質量輕的像移補償機構。
1 像移補償機構組成及傳動原理
空間相機像移補償機構具有精度高、調整范圍小、結構緊湊、質量輕的要求。目前,空間相機像移補償機構大體有兩種傳動方式,一種是絲杠絲母傳動,另一種是全齒輪傳動。絲杠絲母傳動結構簡單,易于加工,費用低,但在真空低溫條件下的兩個極限位置易產生卡滯現象,抗沖擊能力差[5];而全齒輪結構同樣存在抗沖擊能力差的缺點,并且由于偏流角度調整范圍小,只能用到局部齒,付出代價相應較大。本文設計了一種凸輪、齒輪相結合的像移補償結構,凸輪、齒輪等運動件表面經特殊處理后無冷焊、無卡滯現象,有很好的抗沖擊能力,同時結構也比較簡單,將凸輪設計為一偏心輪,解決了凸輪曲線加工要求高的難點。
像移補償機構主要由減速機構、軸系和 CCD組件組成。像移補償機構結構組成如圖1所示。其傳動原理如圖2所示。
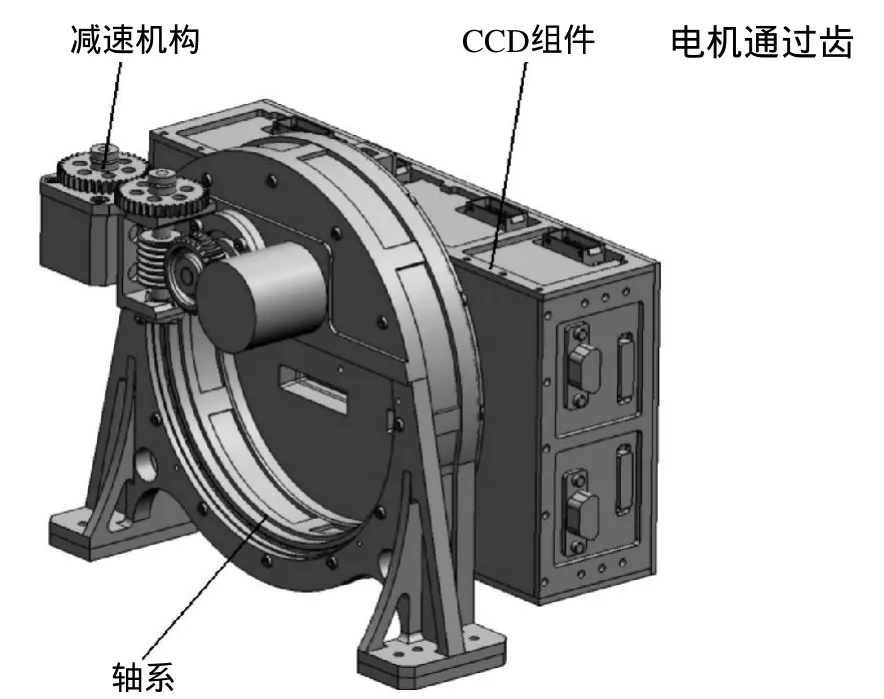
圖1 像移補償機構結構組成Fig.1 The configuration of image motion compensation mechanism
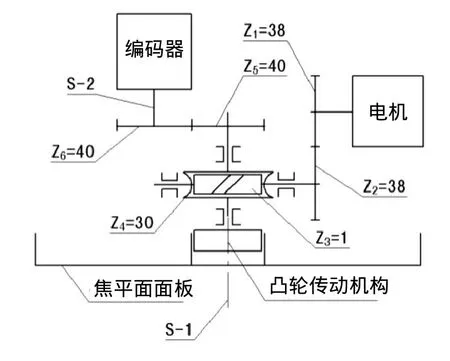
圖2 像移補償機構傳動原理圖Fig.2 Drive structure of the drift angle adjusting
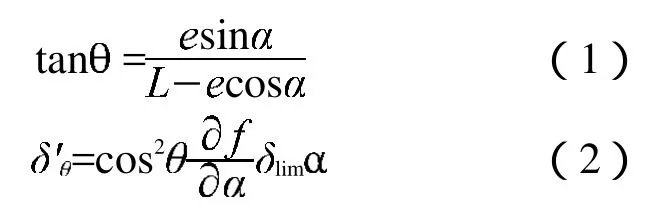
輪驅動蝸桿帶動蝸輪轉動,蝸輪帶動凸輪在滑槽中轉動,驅動焦平面組件繞軸線旋轉,實現了像移補償的功能。凸輪傳動機構運動轉化原理如圖3所示,凸輪傳動機構類似于一個擺臂結構,我們稱之為偏流擺,由于凸輪半徑是一個變值,并且是按一定規律變化的,凸輪推動滑槽,使偏流擺按一定規律左右擺動,這種規律是可設計的。凸輪機構運動轉化原理可以簡化為圖4。
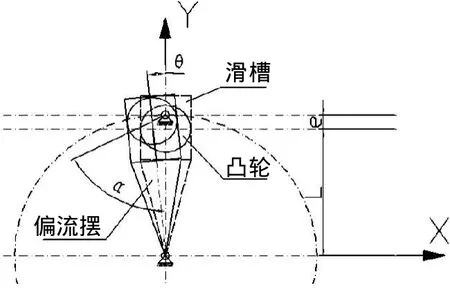
圖3 凸輪機構運動轉化原理圖Fig.3 The elements diagram of cam transmision

圖4 凸輪機構運動轉化原理簡化圖Fig.4 The elements predigestion diagram of cam transmission
2 精度分析
傳動誤差與空回是評定像移補償機構傳動精度的動態性能指標。本像移補償機構的控制系統為閉環控制,編碼器作為反饋元件,它所反映的是焦平面的位置,通過反饋信號控制電機轉動。由于編碼器與焦平面之間傳動誤差與空回的存在,使編碼器不能反映實際焦平面的位置,電機利用編碼器發出的反饋信號對像移補償角度進行控制,導致調偏流實際角度偏離理論角度值,從而相機像面實際位置偏離像面理想位置。傳動誤差與空回過大,會使像移補償機構不能實現像移補償,使相機成像模糊,甚至不能成像。因此,分析編碼器與焦平面之間的傳動誤差與空回是否在誤差允許的范圍內是十分必要的。這是對于這種半閉環像移補償機構所特有的[9]。
像移補償機構的誤差主要來源于軸S-1和軸S-2之間的齒輪傳動誤差、空回及凸輪傳動機構的傳動誤差、空回。
2.1 齒輪傳動誤差計算
齒輪傳動誤差是在齒輪的加工制造、裝配過程中產生的。傳動誤差的大小是由齒輪的加工精度、裝配質量等因素決定的。齒輪的加工精度越高、裝配越合理,齒輪機構的傳動誤差越小,傳動精度越高。齒輪機構的傳動誤差是由齒輪固有誤差和裝置跳動誤差引起的。齒輪的固有誤差就是齒輪的實際齒廓對理想齒廓的偏離。產生齒輪的固有誤差的因素主要有:齒輪的幾何偏心;齒輪的運動偏心;齒輪的基節誤差;齒輪的齒形誤差。裝置跳動誤差就是實際旋轉中心、對理想旋轉中心的偏離。產生裝置跳動誤差的因素主要有:齒輪孔與軸之間的間隙;齒輪安裝處軸徑的跳動;滾珠軸承環偏心。
由于齒輪誤差是隨機的連續變量;各種誤差源的分布都是相互獨立的;齒輪誤差的分布遵循正態分布。因此,可以用數理統計的計算方法對各部分誤差進行計算。
像移補償機構的傳動誤差主要為齒輪6、齒輪5嚙合處的傳動誤差。由于齒輪5、6加工精度等級為5-6-5,根據機械設計手冊可求得齒輪6、齒輪5嚙合處角值傳動誤差為268"。
2.2 凸輪傳動誤差計算

帶入值得凸輪傳動誤差為:

2.3 空回計算
焦平面到編碼器空回由凸輪機構空回和齒輪5和齒輪6嚙合處產生,但是齒輪6采用了消間隙設計,所以齒輪5和齒輪6嚙合處空回基本為0;凸輪機構空回主要由凸輪與滑槽之間間隙引起,間隙為0.005,凸輪與滑槽之間間隙引起的偏流角空回為:

則系統總誤差為:

3 測量試驗與結果
3.1 精度檢測試驗[10]
精度檢測方法如圖5所示,在偏流機構基準面上貼基準鏡,驅動偏流轉動一定角度,用經緯儀測量偏流角度的實際值,可以得到傳動誤差,試驗所用經緯儀的精度為3",而偏流機構的傳動精度要求小于3',所以所用經緯儀可以作為檢測工具。
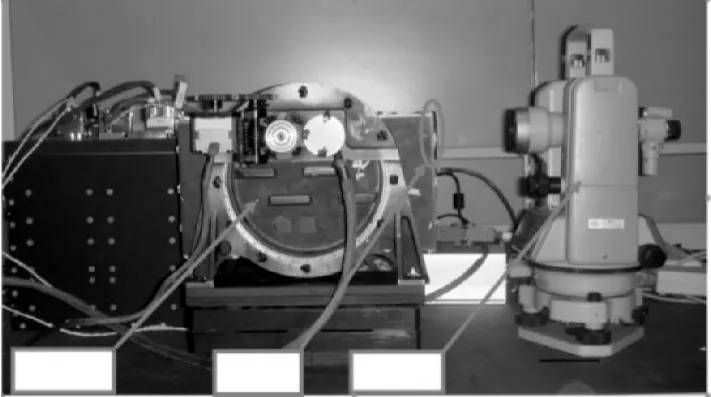
圖5 精度檢測方法Fig.5 The method of precision
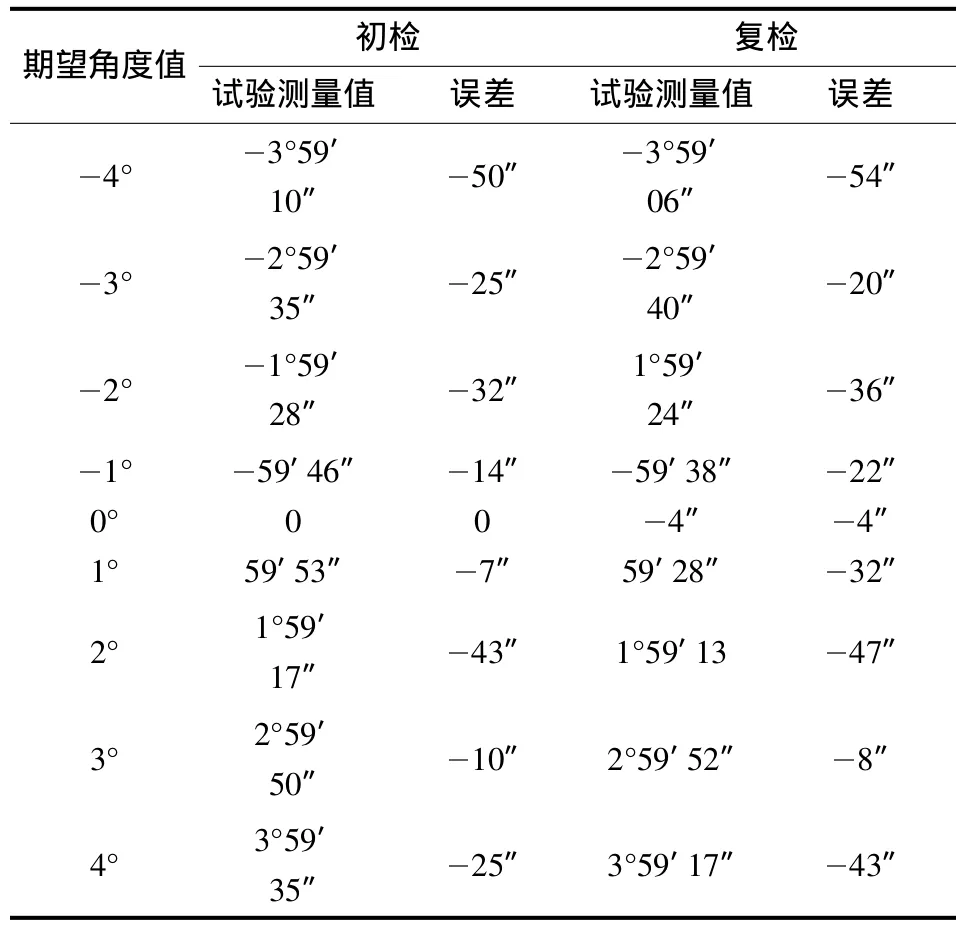
表1 力學振動試驗前精度檢測試驗結果Tab.1 Result of precision test before dynamics vibration

表2 力學振動試驗后精度檢測試驗結果Tab.2 Result of precision test after dynamics vibration
由于偏流角在 4°~4°之間,本實驗中給定偏流機構轉動角度為 4°、 3°、 2°、 1°,0°、1°、2°、3°、4°,并進行復檢,力學振動實驗前測量結果如表1,力學振動實驗后測量結果如表2。
從實驗數據可知,力學振動試驗前后傳動精度均小于1',精度高,滿足使用要求,并且可以斷定由于發射帶來的動態載荷不會對像移補償機構的精度造成影響。
3.2 力學振動試驗
為有效的驗證偏流機構組件自身的力學特性,考核總體力學環境對偏流機構的影響,分別在X、Y、Z三個方向對偏流機構進行了0.5g正弦掃描、5g正弦振動、和4g隨機振動試驗。試驗狀態如圖6所示,偏流機構一階頻率為150Hz;正弦振動最大放大倍率在100Hz處約為2倍,由于偏流機構的第一階頻率大于100Hz,故在0Hz~100Hz間結構件響應很小,試驗響應曲線與輸入曲線近似一致,說明結構件剛度好,在0Hz~100Hz間具有良好的結構穩定性;隨機振動試驗最大響應放大倍率約為輸入的5倍,均滿足設計要求。
4 結論
像移補償機構是空間相機的關鍵部件之一,直接影響空間相機的成像質量。本文設計的像移補償機構精度高—可以達到1',剛度好—一階頻率150 Hz,結構緊湊,質量輕,體積小,適合空間相機的高精度小型化的發展趨勢,對小型化光學衛星有效載荷像移補償機構設計有一定借鑒作用。
[1]許永森,丁亞林,田海英,等.推掃式航空遙感器像移補償精度的分析[J].光學精密工程,2009,17(2):454-458.
[2]童子磊.CCD相機的像移補償技術[J].激光與紅外,2005,35(9):628.
[3]于濤,徐抒巖,韓誠山,等.航空相機偏流角的間歇式實時調整[J].光學精密工程,2009,17(8):1909-1914.
[4]李松,張立平.空間相機偏流調整旋轉軸系的設計與精度分析[J].光學精密工程,2004,12(2):141-144.
[5]李友一.空間相機偏流角控制的研究[D].中科院碩士論文,2001.
[6]劉明,吳宏圣,匡海鵬,等.航空相機的像移補償方法及應用[J].光學精密工程,2004,12(4):30-34.
[7]李仕,張葆,孫輝.航空成像像移補償的并行計算[J].光學精密工程,2009,17(1):226-230.
[8]黃猛,劉家燕,張葆,等.小型面陣航空相機系統的像移補償[J].電光與控制,2009,16(3):69-74.
[9]張洪文.空間相機.航空相機調焦技術研究[D].中科院碩士論文,2003.
[10]谷松,王紹舉.空間相機調偏流機構的設計與控制[J].光學精密工程,2009,17(3):615-620.
[11]高飛,張葆,劉大禹.一種空間相機調焦機構的設計研究[J].長春理工大學學報,2008,31(4):74-76.
