激光通信用車載桅桿設(shè)計
2011-03-16 07:41:40孟立新南世君史健碩
長春理工大學(xué)學(xué)報(自然科學(xué)版) 2011年2期
孟立新,南世君,史健碩
(1.長春理工大學(xué) 空間光電技術(shù)研究所,長春 130022;2.長春理工大學(xué) 機(jī)電工程學(xué)院,長春 130022)
當(dāng)今的高科技戰(zhàn)爭中,一切運(yùn)動的武器平臺,如坦克、步兵戰(zhàn)車、偵察車、自行火炮、武裝直升機(jī)、偵察直升機(jī)、艦船等都必須有相應(yīng)的高效通信系統(tǒng)。大氣激光通信具有通信容量大、機(jī)動性好、抗干擾能力強(qiáng)、保密性好,信息不易被截獲,甚至在原子輻射情況下也能正常工作的優(yōu)點。在地面進(jìn)行激光通信,要求通信站點間能夠通視,因此需要將通信光端機(jī)架設(shè)在高處——桅桿上,以克服地表建筑、植被對通信的遮擋,提高通視性,達(dá)到順利通信。
本文對桅桿進(jìn)行結(jié)構(gòu)設(shè)計,并利用ANSYS分析其動態(tài)特性,對其受風(fēng)載荷力進(jìn)行分析,最后在真實環(huán)境做實驗驗證,在滿足桅桿和光端機(jī)技術(shù)指標(biāo)的前提下,實驗結(jié)果符合設(shè)計要求。
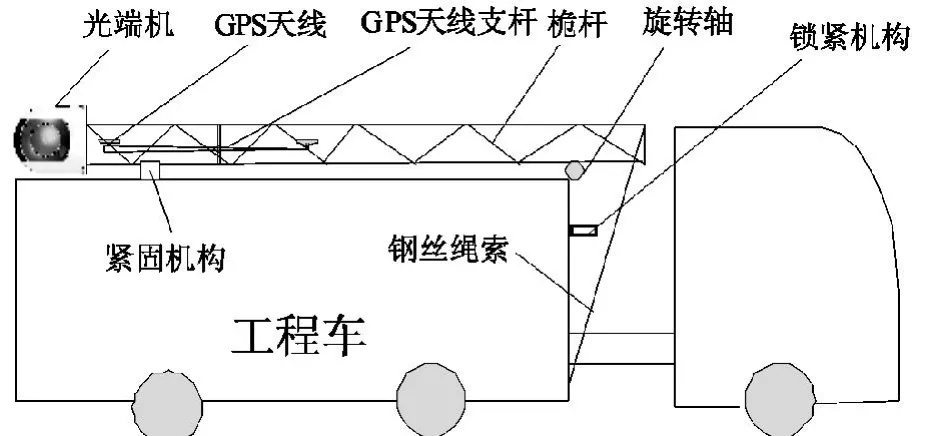
圖1 非正常工作狀態(tài)時,桅桿收藏圖Fig.1 The diagram of mast collection when non-normal working condition
1 桅桿總體設(shè)計
在非工作狀態(tài)時,桅桿通過旋轉(zhuǎn)軸和緊固機(jī)構(gòu)平放并固定在工程車上,如圖 1所示;準(zhǔn)備工作時,采用電機(jī)或人通過轉(zhuǎn)動絞盤牽引鋼絲繩索運(yùn)動,使桅桿繞旋轉(zhuǎn)軸旋轉(zhuǎn),到達(dá)工作位置后,用鎖緊機(jī)構(gòu)使桅桿豎直并固定,如圖2所示。
1.1 車載桅桿及光端機(jī)主要技術(shù)指標(biāo)
(1)桅桿:
高度:12m(含載車高4m);
重量:<60Kg。
(2)光端機(jī):
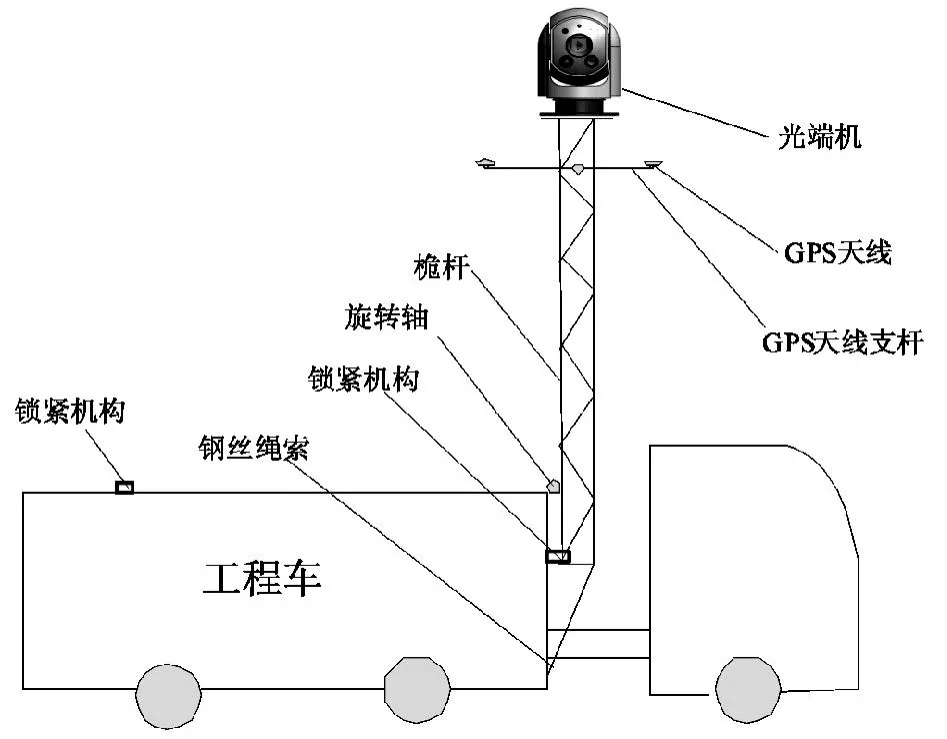
圖2 正常工作狀態(tài)時,桅桿架設(shè)圖Fig.2 The diagram of mast erection when normal working condition
1.2 桅桿結(jié)構(gòu)設(shè)計
本文設(shè)計的桅桿是在已有的通信車上使用,考慮到安裝方便、固定牢固、負(fù)載輕等問題,決定采用三角形框架結(jié)構(gòu)形式[1],材料用45#,周圍鋼管與主鋼管排“人”字型焊接[2]。結(jié)構(gòu)形式圖如圖3所示。
此設(shè)計在軸上還安裝了一排作用力與桅桿和負(fù)載重力方向相反的彈簧機(jī)構(gòu)-扭簧,使其一邊與車體固定,另一邊與桅桿軸向垂直緊貼,這樣當(dāng)桅桿隨軸旋轉(zhuǎn)的時候,扭簧產(chǎn)生反力,使其達(dá)到力矩平衡,減小了牽引力。扭簧結(jié)構(gòu)如圖4所示。

圖3 桅桿結(jié)構(gòu)圖Fig.3 The diagram of mast structure

圖4 扭簧結(jié)構(gòu)簡圖Fig.4 The diagram of twist spring structure
1.3 桅桿模態(tài)分析
在大慣量功率系統(tǒng)中,都幾乎共同面臨著一個結(jié)構(gòu)諧振問題。桅桿的結(jié)構(gòu)諧振主要是由桅桿的柔性與大負(fù)載慣量引起的,它有一定的諧振頻率,如果這一諧振頻率接近伺服系統(tǒng)頻寬,將使系統(tǒng)的穩(wěn)定性受到威脅。因此,常將桅桿機(jī)械部分的固有頻率設(shè)計成為驅(qū)動部分固有頻率的5~8倍以上,所以要進(jìn)行桅桿的模態(tài)分析,如圖5所示是桅桿前6階模態(tài)分析結(jié)果。
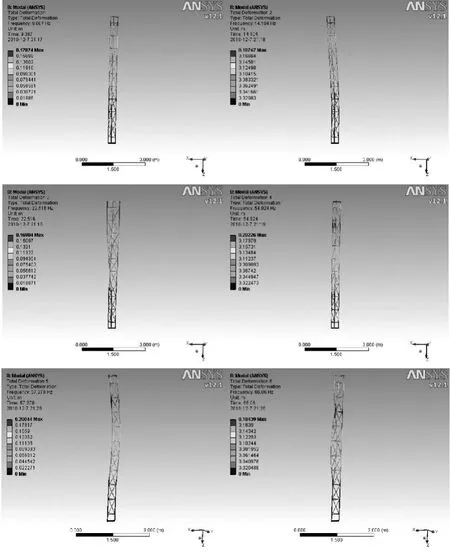
圖5 桅桿前6階模態(tài)分析圖Fig.5 The diagram of modal analysis of mast for the 6 steps
前6階模態(tài)圖譜如圖6所示。
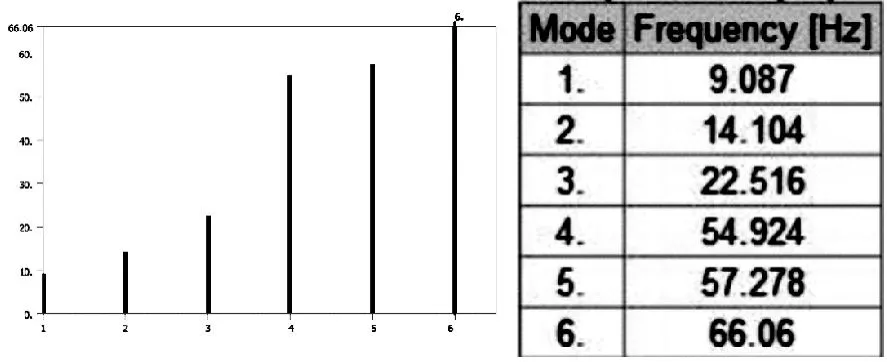
圖6 系統(tǒng)前6階模態(tài)分析結(jié)果圖Fig.6 The diagram of modal analysis result of system for the 6 steps
通過模態(tài)分析,桅桿最低頻率為9Hz,高于控制帶寬設(shè)計要求。
1.4 桅桿結(jié)構(gòu)諧響應(yīng)分析
桅桿結(jié)構(gòu)諧響應(yīng)的位移和加速度如圖7、8所示。
分析以上兩圖,得出它們共同的諧振頻率約為100Hz,所以設(shè)計和使用時應(yīng)避開這個頻率,以克服共振、疲勞,以及受迫振動引起的有害效果。

圖7 位移諧響應(yīng)圖Fig.7 The diagram of displacement harmony response

圖8 加速度諧響應(yīng)圖Fig.8 The diagram of acceleration harmony response
1.5 桅桿受力分析
桅桿工作時所受外力主要有負(fù)載壓力和風(fēng)載荷,由于風(fēng)載荷是高聳結(jié)構(gòu)的主要載荷,所以風(fēng)載荷是影響桅桿晃動的主要因素。
風(fēng)載荷計算公式為[3]:

(1)風(fēng)力系數(shù)C
風(fēng)力系數(shù)與結(jié)構(gòu)物的體型、尺寸等有關(guān),對于圓管制成的框架結(jié)構(gòu)C=1.3。
式中:q—計算風(fēng)壓,單位 N/m2;V—計算風(fēng)速,單位m/s
(3)計算風(fēng)壓q
風(fēng)壓與空氣密度和風(fēng)速有關(guān),按下式計算:

(4)迎風(fēng)面積A
結(jié)構(gòu)與其上物品的迎風(fēng)面積按最不利迎風(fēng)方位
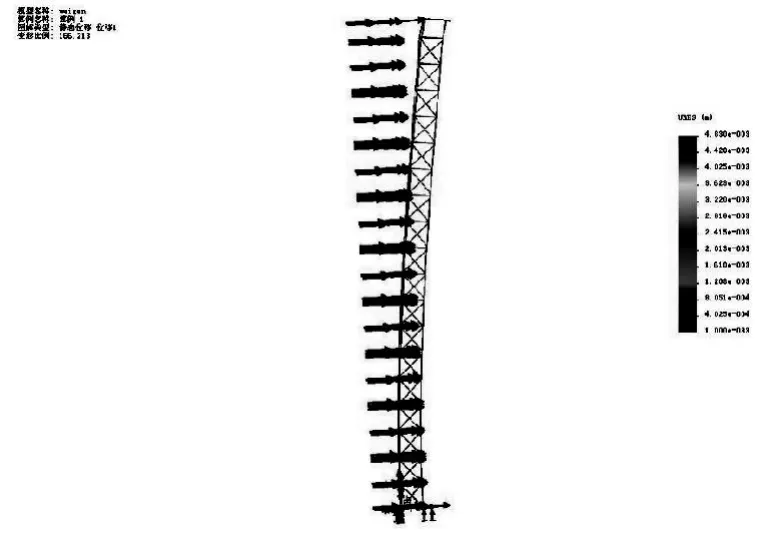
圖9 桅桿變形仿真分析圖Fig.9 The diagram of mast distortionsimulation analysis
計算并取垂直于風(fēng)向平面上的投影面積。

經(jīng)計算桅桿所受風(fēng)載荷為:1.12×2N,按五級風(fēng)計算,風(fēng)速為8.0~13.8m/s,風(fēng)載荷約為213N。
將上述計算出的風(fēng)載荷213N看作分布力均勻施加在桅桿垂直表面上,如圖9所示。經(jīng)過變形仿真分析,計算出最大變形為4.83mm,此位移很小,符合系統(tǒng)要求。
2 桅桿外場實驗
對于載體振動強(qiáng)烈的環(huán)境,穩(wěn)定誤差是光端機(jī)跟蹤誤差的主要來源之一,通信光端機(jī)所承受的振動主要由兩部分組成,一是儀載車在怠速情況下,發(fā)動機(jī)的定頻振動,這部分振動通過桅桿傳遞到光端機(jī)上,經(jīng)過對桅桿振動模態(tài)分析和實際振動測試,經(jīng)過桅桿衰減后,傳遞到光端機(jī)上的振動十分微弱,可以忽略不計;另一個是風(fēng)載荷引起的低頻大幅值搖擺振動,這種搖擺振動對光端機(jī)的影響較強(qiáng)烈。
本設(shè)計為了檢測桅桿在真實工作環(huán)境中的性能,進(jìn)行了原理樣機(jī)室外演示驗證實驗。由于目前只有一臺儀載車,因此將其中一個光端機(jī)架設(shè)在室內(nèi),另一臺架設(shè)在桅桿上,圖10為野外實驗現(xiàn)場。

圖10 野外實驗現(xiàn)場圖Fig.10 The diagram of field experiment
當(dāng)桅桿處于工作狀態(tài)后,首先利用 GPS測得雙方的距離,其次用風(fēng)速計測量環(huán)境風(fēng)速,再用振動測試儀測量桅桿頂端即光端機(jī)安裝座處的振動情況[4],最后利用誤碼儀測量通信雙方的誤碼率,經(jīng)過多次實驗和測量,對光端機(jī)的跟蹤精度和通信誤碼率進(jìn)行了大量的實驗,經(jīng)過數(shù)據(jù)統(tǒng)計和處理,得到光端機(jī)的性能參數(shù),實驗條件歸納如表1。

表1 野外動態(tài)實驗條件及跟蹤精度統(tǒng)計表Tab.1 The statistics table of the wild dynamic experiment conditions and tracking precision
兩次實驗所測得的桅桿振動特性見圖11、12。

圖11 實驗一時桅桿振動特性圖Fig.11 The diagram of mast vibration peculiarity when experiment 1
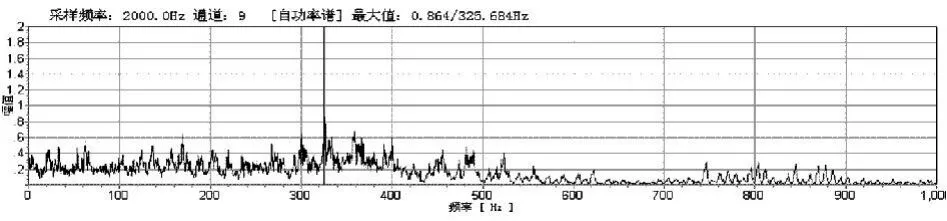
圖12 實驗二時桅桿振動特性圖Fig.12 The diagram of mast vibration peculiarity when experiment 2
兩次實驗桅桿擺動特性見圖13、14。
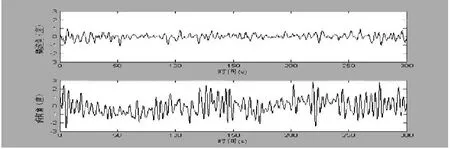
圖13 實驗一時桅桿擺動特性圖Fig.13 The diagram of mast swing peculiarity for experiment 1
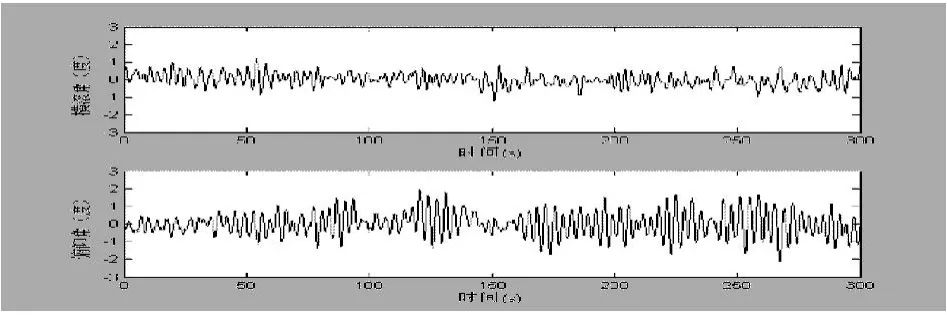
圖14 實驗二時桅桿擺動特性圖Fig.14 The diagram of mast swing peculiarity for experiment 2
兩次實驗實測跟蹤誤差曲線見圖15、16。
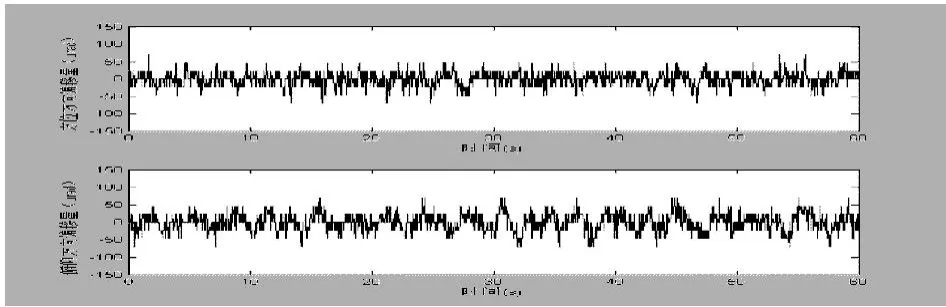
圖15 外場實驗一跟蹤誤差曲線圖Fig.15 The diagram of tracking error curve for field experiment 1
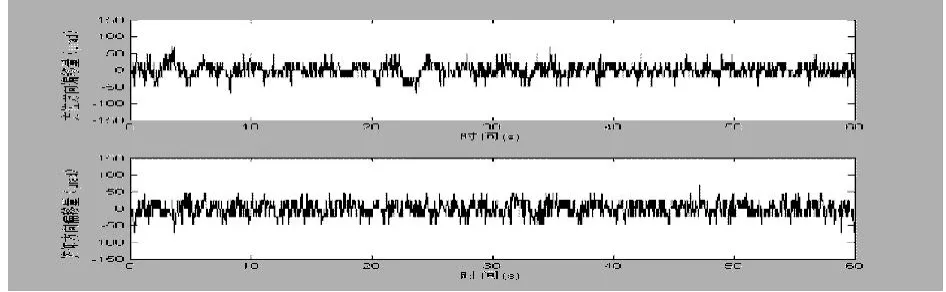
圖16 外場實驗二跟蹤誤差曲線圖Fig.16 The diagram of tracking error curve for field experiment 2
對測試數(shù)據(jù)統(tǒng)計分析,得到表 2所示測試結(jié)果。

表2 野外動態(tài)跟蹤精度測量數(shù)據(jù)Tap.2 The measurement date of the wild dynamic tracing accuracy
由實驗結(jié)果可知:在不同風(fēng)速、振動等動態(tài)條件下,跟蹤誤差滿足設(shè)計要求,驗證了本設(shè)計桅桿的可行性。
3 結(jié)論
本文通過對激光通信用車載桅桿進(jìn)行結(jié)構(gòu)設(shè)計、受力計算和有限元分析,并進(jìn)行室外實驗,在獲得了在特定環(huán)境下的性能參數(shù)下,實踐證明此桅桿是可行的。
[1]王肇民.桅桿結(jié)構(gòu)[M].北京:科學(xué)出版社,2000.
[2]T.R.格爾內(nèi).焊接結(jié)構(gòu)的疲勞[M].北京:機(jī)械工業(yè)出版社,1988.
[3]何慶林.桅桿計算中幾個因素的綜合分析[J].艦船工程研究,1997(1):20-24.
[4]鄧洪洲,屠海明,王肇民.桅桿結(jié)構(gòu)隨機(jī)風(fēng)振疲勞研究[J].土木工程學(xué)報,2003,36(4):21-22.
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
中華詩詞(2019年7期)2019-11-25 01:43:04
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經(jīng)濟(jì)學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
上海電機(jī)學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
