基于MAS的彈藥裝填機器人運動控制研究
2011-04-10 02:22:30韓振飛
制造業自動化 2011年11期
關鍵詞:智能
徐 達,帥 元,韓振飛,夏 祥
XU Da,SHUAI Yuan,HAN Zhen-fei,XIA Xiang
(裝甲兵工程學院,北京 100072)
0 引言
智能體機器人(Agent)是機器人領域近年來十分熱點的問題,它以高度的靈活性、容錯性和魯棒性克服了以往集中式控制理念的不足,成為對機器人系統進行系統分析和設計的強有力的一種方法。在一個復雜系統中,系統整體往往可由許多個智能體按一定規則結合而成,通過采用基于協商的決策這就是多智能體系統(Multi-Agent System,MAS),它能夠在相同環境中得到多種的解決問題方法,具有并行性、智能性和柔性。對于具有高智能特性的7自由度彈藥裝填機器人來講由于對機器人的魯棒性要求較高,所以運動控制的過程十分復雜。本文運用MAS方法,通過軟件對七自由度彈藥裝填機器人運動軌跡進行了研究,得出了單關節失效時的運動軌跡。
1 彈藥裝填機器人運動控制結構
研究彈藥裝填機器人運動控制最為主要的工作是關節空間位置、速度、加速度以及所形成的運行軌跡。彈藥裝填機器人結構復雜普通關節空間地解算不利于快速和有效地克服關節故障產生的運動退化,而MAS系統具備高度的錯容性,可以有針對性地對彈藥裝填機器人進行運動控制。
1.1 任務區分
對于彈藥裝填機器人的MAS系統來講,設計的根本意義就是簡化數學的模型,增加關節協作的次數從而達到克服故障的目的。這就要求將任務的目標作為實時解算的根本依據,所以首先要將任務進行有效的區分。
1)協調任務目標:在整個協作過程中,除了必須存在多個參與協作實現協作目標的參與者外,還存在負責MAS協作的協調者。協作協調者的任務主要是一方面提出協作需求,并對協作目標進行規劃;另一方面,協調者還負責根據競爭者的條件挑選恰當的協作伙伴。
2)控制任務目標:由協調Agent在特定的情況下產生。本文假設特定的情況為無法達到預定的裝填位置而采用保持空間中兩個坐標不變,第三個坐標微調適應的原則。
3)實時任務目標:預定任務目標是依賴于前面協調任務的結果而由產生的新的能達到預定目標的實施方案,其具有實時的特性。
4)子任務目標:實時任務目標體系內獨立的Agent應當完成的任務,以及當完成的關聯協作。
5)預定目標:最終應當完成的裝填任務。
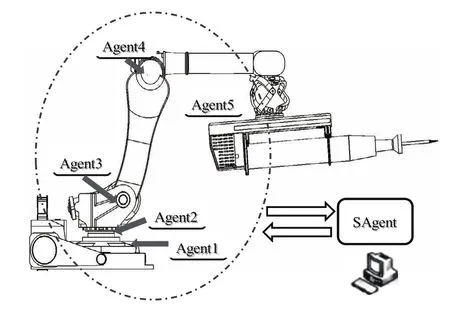
圖1 MAS設置方案
設計該模型主要的思路是功能和目標分離,以目標為主;規劃和目標實時交互,突出規劃對于目標的影響和指導,體現目標對于規劃的補充和延伸。
1.2 彈藥裝填機器人智能體設置方案
將整個彈藥裝填機器人臂手結構設計成五個智能體和一個協調智能體,如圖1所示。
分別將各個智能的關節設計為簡單的反應式Agent,分別是:
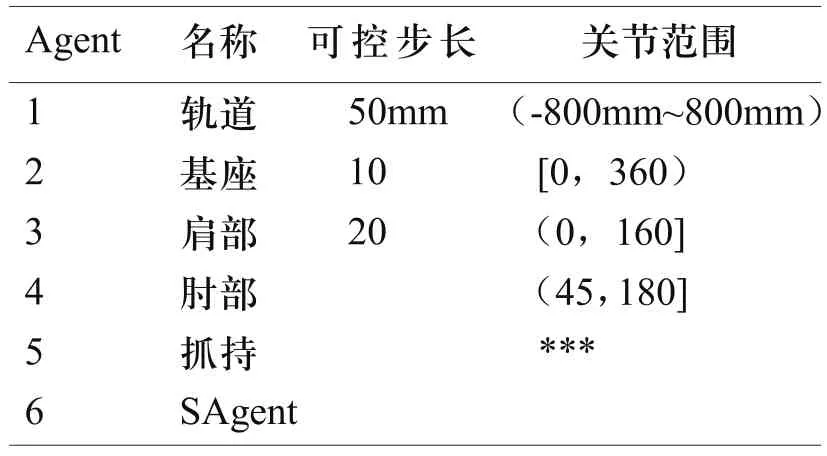
表1 智能體設置方案
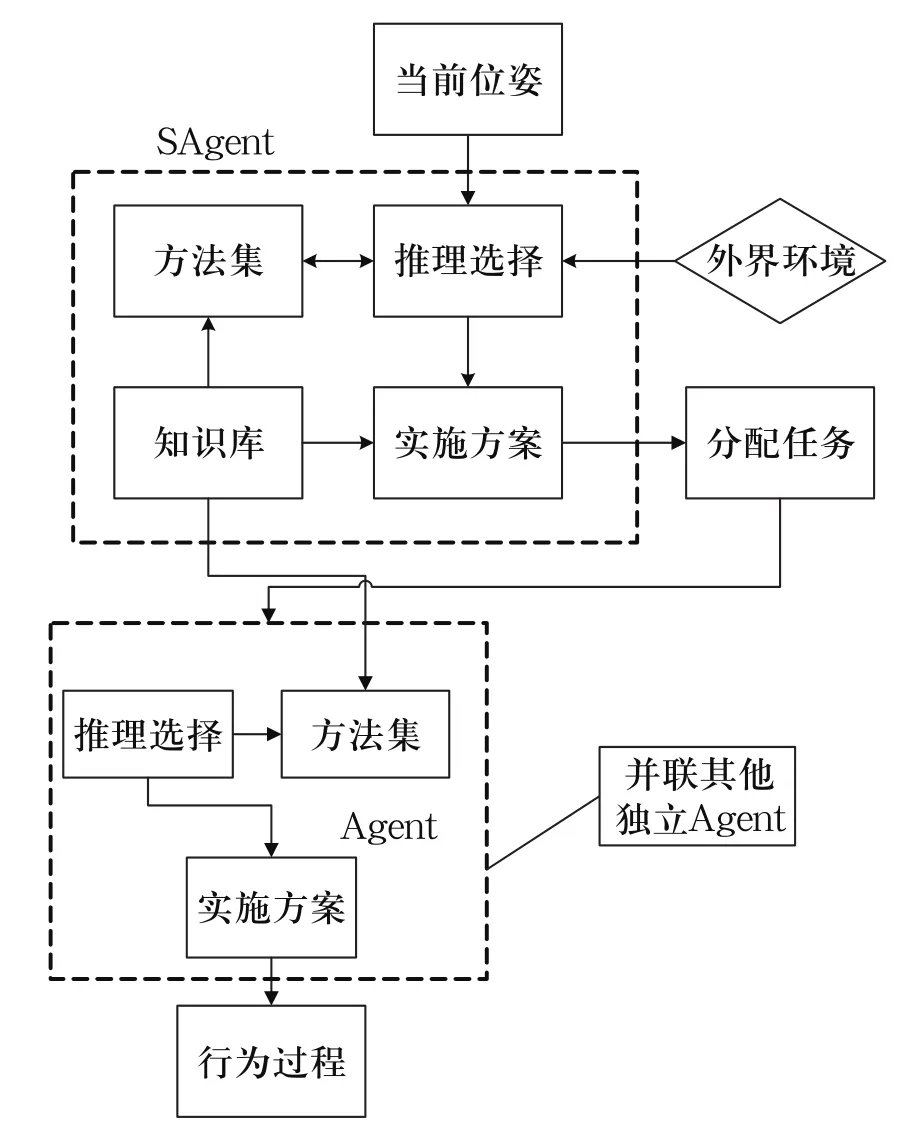
圖2 控制體系
1.3 彈藥裝填機器人控制體系
本文采用分布式的控制體系如圖2所示,主要思想就是:在協調SAgent收到工作的任務目標的時候,通過知識庫得出各個Agent的子任務目標,以及各個Agent協調工作順序的相關信息,并立即將其傳遞給每一個Agent;然后單個Agent在自己的知識目標中找到子任務目標,以及相關的規劃信息,根據當前所有信息得出完成方案并執行。執行過程中實時的將信息傳遞到每個Agent以及SAgent處,實時的優化運動方案。
2 面向任務域完全協作設計
各Agent在工作的過程中需要進行實時協作,本文根據彈藥裝填機器人MAS系統各個智能體之間相互獨立,但是卻又共享協作的工作模式設計出基本的面向任務預的協作函數,以及應當具備的協作策略。
協作方式可以分為兩類:單Agent協作方式以及MAS在SAgent協調下的聯合協作方式。單Agent協作主要是指進行單個Agent之間的通信與協調,而其他不相關Agent保持原來的狀態。MAS在SAgent協調下的聯合協作方式是指,SAgent進行多個Agent同時協調控制。兩種控制方式具體通信過程如下:
1)單Agent協作方式:單個Agent和Agent之間的協作。首先由任務Agent向協作Agent發送指令,設置新的目標位置或者查詢當前位置,之后等待。協作Agent收到指令后必須應答,任務Agent在收到應答信息后才能發送新的指令或重發上一次的指令。任務Agent等待應答的時間為1ms上限為,若超過此上限,則主計算機將發送新的指令或重發上一次的指令。
2)MAS在SAgent協調下的聯合協作方式是指:進行位置控制時,SAgent首先依次對單獨的Agent控制器設置任務,每一次只和某個Agent通信,當確認所有應答無誤時,主計算機采用廣播方式發送一條啟動指令,命令所有Agent按預定指示開始工作。
3 基于MAS彈藥裝填機器人運動控制魯棒性試驗
3.1 程序設計
7自由度彈藥裝填機器人如圖3所示,之間的關節角為θp(p=1,2,......,n)記末端的執行機構的坐標為E(xe,ye,ze)末端執行器期望軌跡上任意一個點T(xd,yd,zd)利用齊次變換矩陣的方法可以得出關于執行機構的坐標和各個關節角之間的關系:
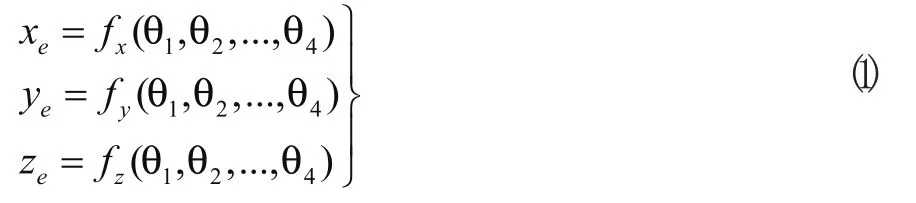
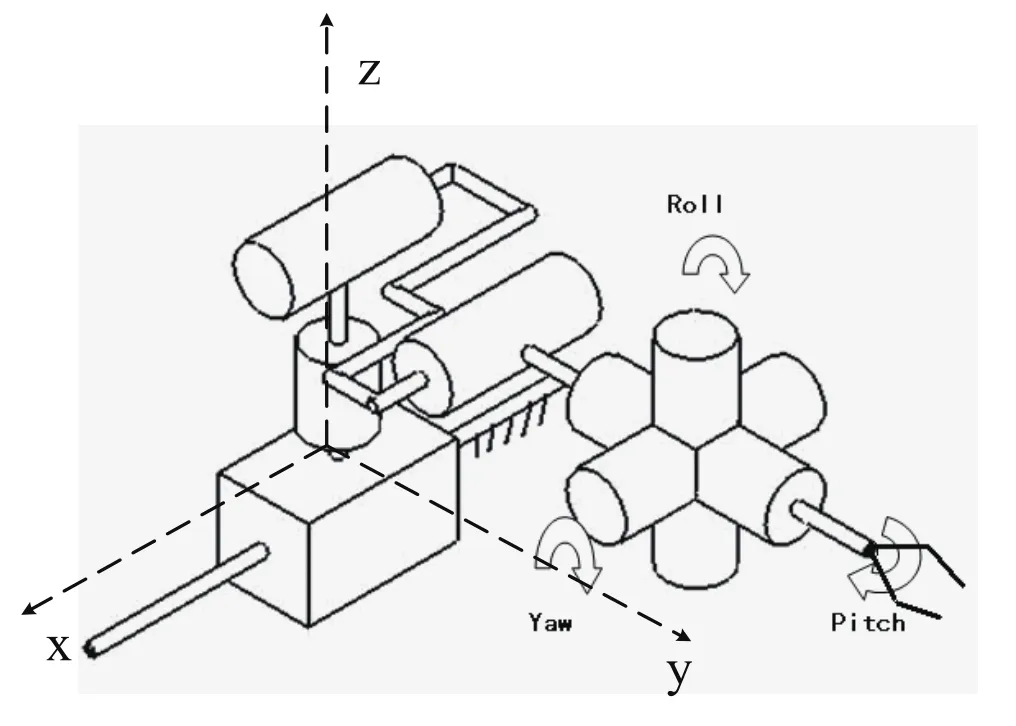
圖3 彈藥裝填機器人機構簡圖
我們取相對的位移差得到:
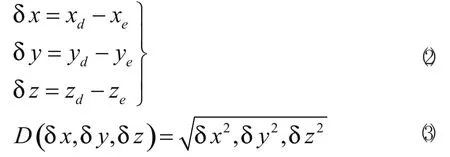
理論上是當D(δx,δy,δz)=0時彈藥裝填機器人的任務才算是完成,即末端執行器已經到達了指定的位置。假設三個坐標軸的方向上的相對距離θp的梯度分別為Gxp(θp)、Gyp(θp)和Gzp(θp)。在迭代求解過程中,采用的決策應保證D(δx,δy,δz)沿其梯度方向減小,否則θp應保持靜止。
在研究的過程中發現機器人的工作過程中受到了空間和關節角度的影響,其運動能力應當出現一定的退化所以本文構造簡易的車內空間假設在裝填彈藥的過程中只要能夠滿足z坐標,x和y坐標能有微小的變化就能完成彈藥的裝填。
采用簡單的控制策略為:
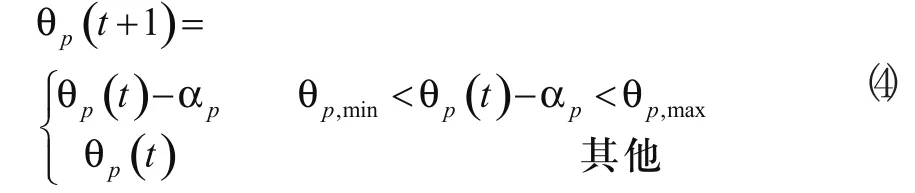
式中:θp,max和θp,min分別為機器人的第p個關節角動作范圍上、下限;αp為動態步進角,即:

λp為定常的正值比例系數,用以將:
3.2 實現過程
設計時鐘變量timer()進行實時的跟蹤可設時間間隔為1s,在SAgent變量中設計多種規劃為裝填位置沿y軸方向上的每隔5mm的一個目標集合G={g0,g1,g2,...,gn}優選順序為:

其中g0是預定的無故障平臺時候的裝填機器人軌跡。然后通信各個Agent接收到SAgent發送的gi信號后得出自己的子任務,然后按照預定的計劃完成任務。通過仿真得出一下結果如圖4所示
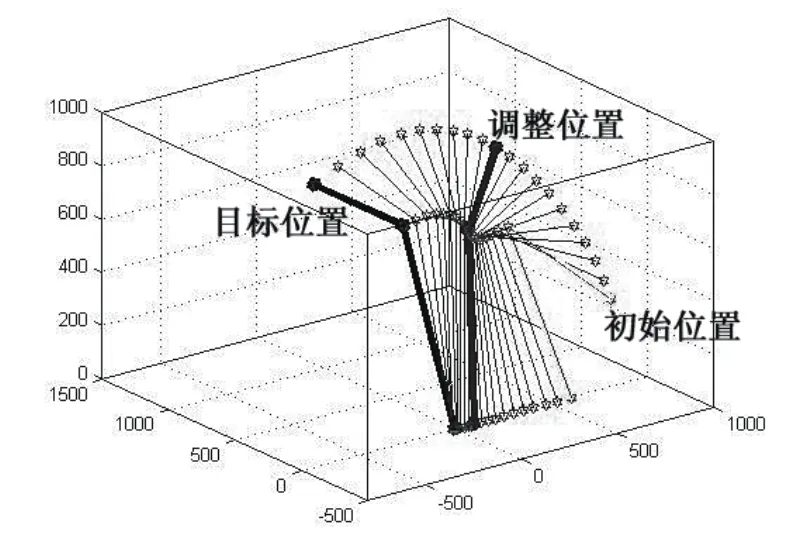
圖4 無故障平臺時的位置軌跡
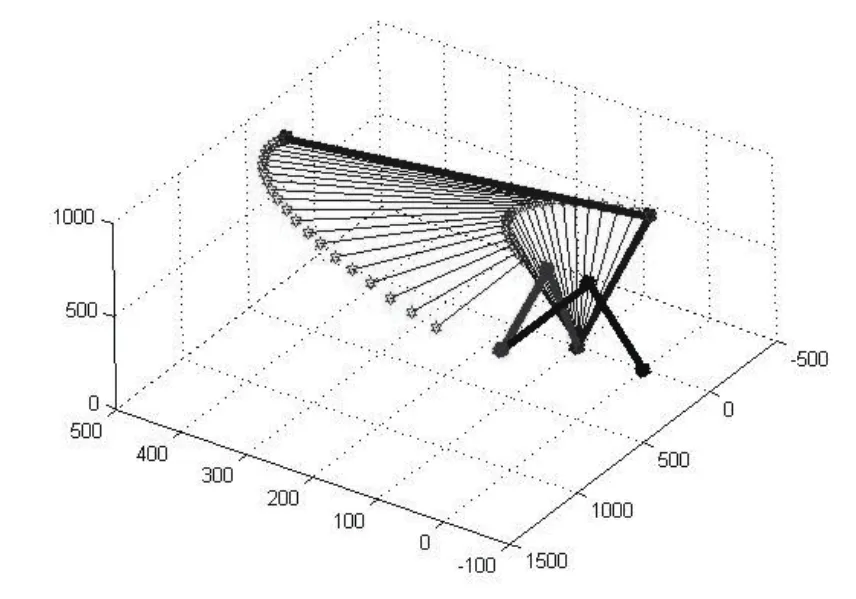
圖5 軌道失效退化后的位置軌跡
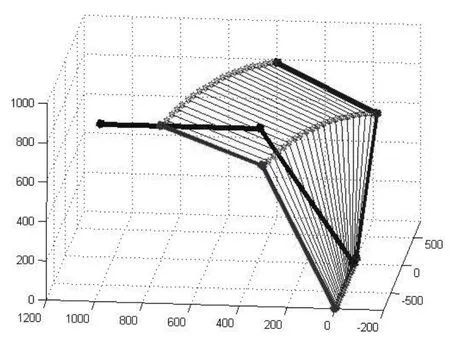
圖6 基座失效后的位置軌跡
從圖5軌道Agent失效后彈藥裝填機器人的退化后的軌跡和實時姿態可以看出軌道故障后彈藥裝填機器人仍然能夠到達預定的裝填位置完成裝填的任務。
基座Agent失效后彈藥裝填機器人退化后無法達到預定的位置,此時SAgent在收到信息后根據算法給出另外的目標Si,然后各個子Agent得出運行軌跡如圖6所示。
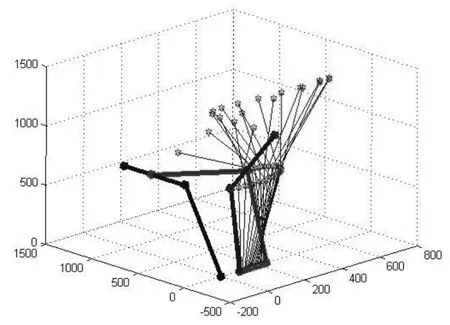
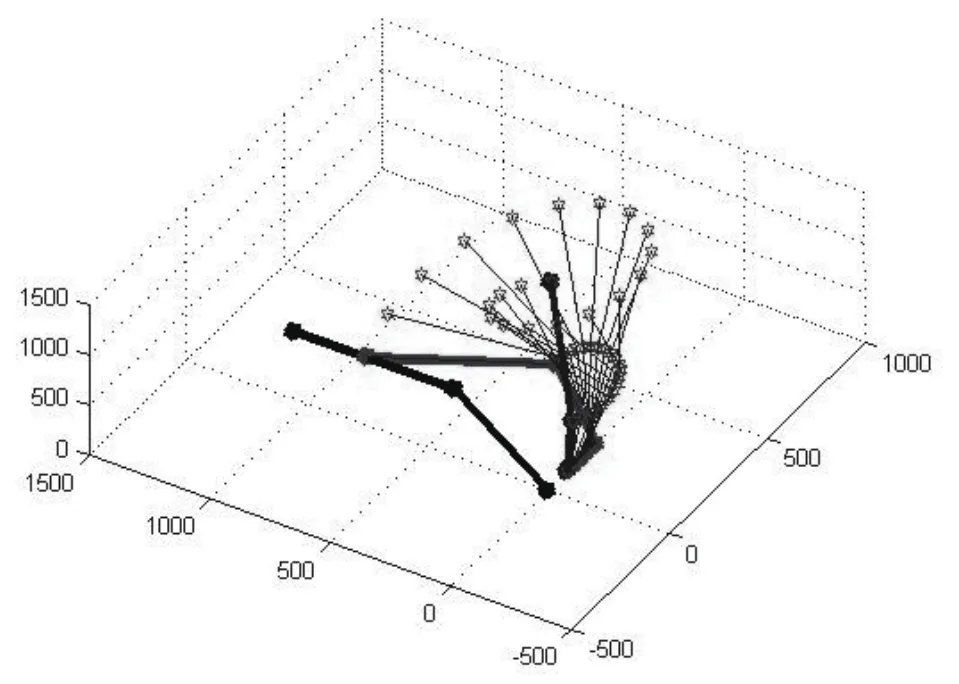
圖7 大臂失效后位置軌跡
根據圖像顯示根據,基于MAS的運動控制方法能夠簡單的進行柔性控制達到機器人整體魯棒性能的提高。
4 結束語
本文提出了一種基于MAS的具有較高錯容性的彈藥裝填機器人運動控制方法,將彈藥裝填機器人看成是由MAS系統組成,同時由一個協調SAgent進行協調控制運動。彈藥裝填機器人完成預定的裝填目標時,將裝填任務分解各個Agent的子任務,而各個Agent又獨立完成子任務并由SAgent進行時鐘協調運動控制最終完成預定目標。這種方法的好處有以下四點:
1)彈藥裝填系統的工作能力可以通過增加預定的規劃數量,就可以在彈藥裝填機器人可達空間內增加工作方案;
2)在MAS系統內,可以有效的進行規避障礙物和克服關節故障帶來工作難題,提高彈藥裝填機器人的柔性和魯棒性;
3)該方法比較過去的并行控制的模式具有更高的靈活性和可靠性;
4)通過仿真實驗,MAS系統具有很好的環境適應能力,魯棒性較好,能夠保證在動態、不確定環境下實時地進行運動控制。
[1] 王中盛.彈藥裝填機器人軌跡規劃及動力學分析[D].裝甲兵工程學院,2008.
[2] 寧可軍,楊汝清.基于多智能體的機械臂嵌入系統控制[J].上海交通大學學報,2005.
[3] 王汝傳.智能體技術在信息網絡中的應用[M].工業出版社,2006.
[4] Jorge Angeles theory,technique and arithmetic of mechanical System[M].機械工業出版社,2008.
[5] 劉金坤.機器人控制系統的設計與仿真[M].清華大學出版社,2008.
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
