分布式浮標(biāo)陣高幀率異步水聲定位
2011-04-13 09:21:40王燕梁國龍付進(jìn)
哈爾濱工程大學(xué)學(xué)報 2011年3期
關(guān)鍵詞:信號
王燕,梁國龍,付進(jìn)
(哈爾濱工程大學(xué) 水聲技術(shù)實驗室,黑龍江 哈爾濱 150001)
受水聲信道帶寬窄、信號傳播速度慢、界面多途及聲線彎曲等諸多不利因素的制約,對水下目標(biāo)進(jìn)行高精度的定位導(dǎo)航較之陸地和空中目標(biāo)要困難得多[1].而空間分布式浮標(biāo)陣水聲定位系統(tǒng)為水下目標(biāo)高精度三維定位提供了必要的技術(shù)手段[2-3].
對于水下合作目標(biāo),現(xiàn)有的水聲定位系統(tǒng)多采用同步工作方式[4],即在每次測量前,被測聲源的時鐘(安裝在運動目標(biāo)上)與接收系統(tǒng)需進(jìn)行同步對時.同步對時雖可達(dá)到很高的精度,但同步系統(tǒng)對聲源和接收系統(tǒng)時鐘的穩(wěn)定度要求均較高.有限的時鐘穩(wěn)定度不僅會導(dǎo)致時鐘偏差累積,還容易因外界隨機(jī)強(qiáng)脈沖干擾而引起時鐘擾動偏差,進(jìn)而影響系統(tǒng)定位精度.而異步工作方式不要求聲源和接收系統(tǒng)精確對時,在陣內(nèi)可達(dá)到與同步系統(tǒng)相媲美的定位精度[3],因而適用范圍更加廣泛.
對于作高速、復(fù)雜運動的水下目標(biāo),定位系統(tǒng)必須保證足夠高的軌跡采樣率才能正確描述其軌跡.但受距離模糊[5]的限制,通常的定位系統(tǒng)其軌跡采樣率均較低(在秒量級),這限制了對高速目標(biāo)的跟蹤能力.將長基線、超短基線2種定位方法組合[6],可在不產(chǎn)生距離模糊的前提下適當(dāng)提高測量幀率,但其單個浮標(biāo)基元的結(jié)構(gòu)較復(fù)雜,海上布放回收不便.為彌補(bǔ)上述缺陷,本文從信號波形設(shè)計出發(fā),提出了一種基于組合脈沖串的長基線高幀率異步水聲定位技術(shù),可將幀率進(jìn)一步提高到0.1 s量級.
1 定位系統(tǒng)構(gòu)成
圖1、2分別是浮標(biāo)陣異步水聲定位系統(tǒng)工作態(tài)勢圖和測量陣構(gòu)成圖.一個基本的定位系統(tǒng)由4個無線電遙控水聲定位浮標(biāo)組成,其中包括2個垂直雙水聽器浮標(biāo)和2個單水聽器浮標(biāo),構(gòu)成一個6陣元的立體測量陣.各浮標(biāo)間利用GPS同步對時,浮標(biāo)接收機(jī)以異步方式接收從目標(biāo)聲源發(fā)射的脈沖信號,檢測到信號后記錄下脈沖前沿到達(dá)的時刻.GPS實時測定浮標(biāo)的大地坐標(biāo)位置,借助于無線電通信鏈實時將浮標(biāo)位置、信號傳播時延等參數(shù)傳送到測量船顯控平臺進(jìn)行定位解算.一個基本陣型可對3 km×3 km×300 m范圍內(nèi)的目標(biāo)進(jìn)行實時三維跟蹤監(jiān)測,如需增大測量范圍,可通過增加級聯(lián)浮標(biāo)個數(shù)來實現(xiàn),系統(tǒng)擴(kuò)展便利.
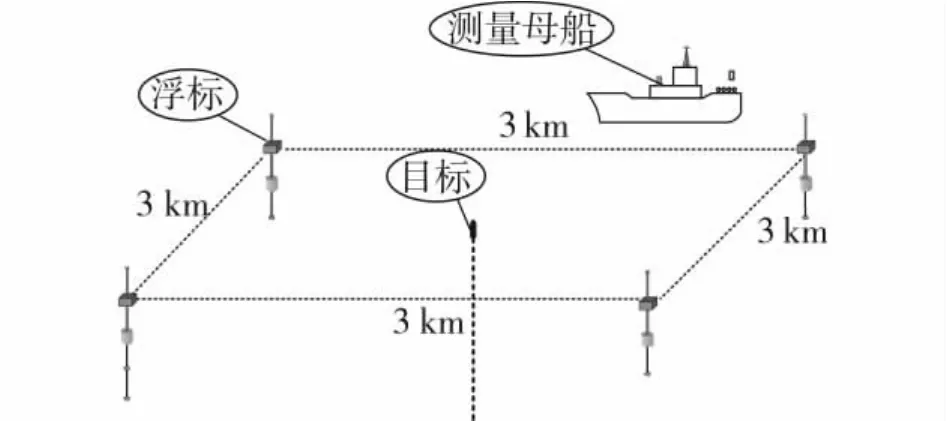
圖1 系統(tǒng)工作態(tài)勢Fig.1 Sketch of the localization system
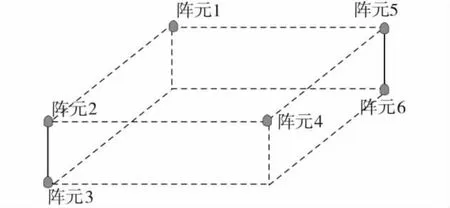
圖2 定位系統(tǒng)測量陣構(gòu)成Fig.2 Structure of the localization system measurement array
2 異步水聲定位原理
通過測量聲信號從聲源到各接收水聽器所經(jīng)歷的傳播時延可以確定聲源到各陣元的距離,每一組時延可確定聲源所在的一個球面[7]:

式中:(xi,yi,zi)和ti分別是第i個陣元的空間位置以及第i個陣元接收信號的時刻相對于接收機(jī)時鐘的時間;(xs,ys,zs)和ts分別為目標(biāo)的空間坐標(biāo)以及信號發(fā)射時刻相對于接收機(jī)時鐘的時間;c為聲波在水中的傳播速度.xs、ys、zs和ts為未知量,其余變量均為可測量.
在式(1)中,xs、ys、zs和ts為未知量,其余變量均為可測量.設(shè)di(i=1,2,3,4)為第i號陣元到目標(biāo)的距離,di1為第i號陣元與第1號陣元到目標(biāo)的距離差.ri為第i號陣元到坐標(biāo)原點的距離,并且有

式(1)表示的方程組還可寫成矩陣形式:

其中:
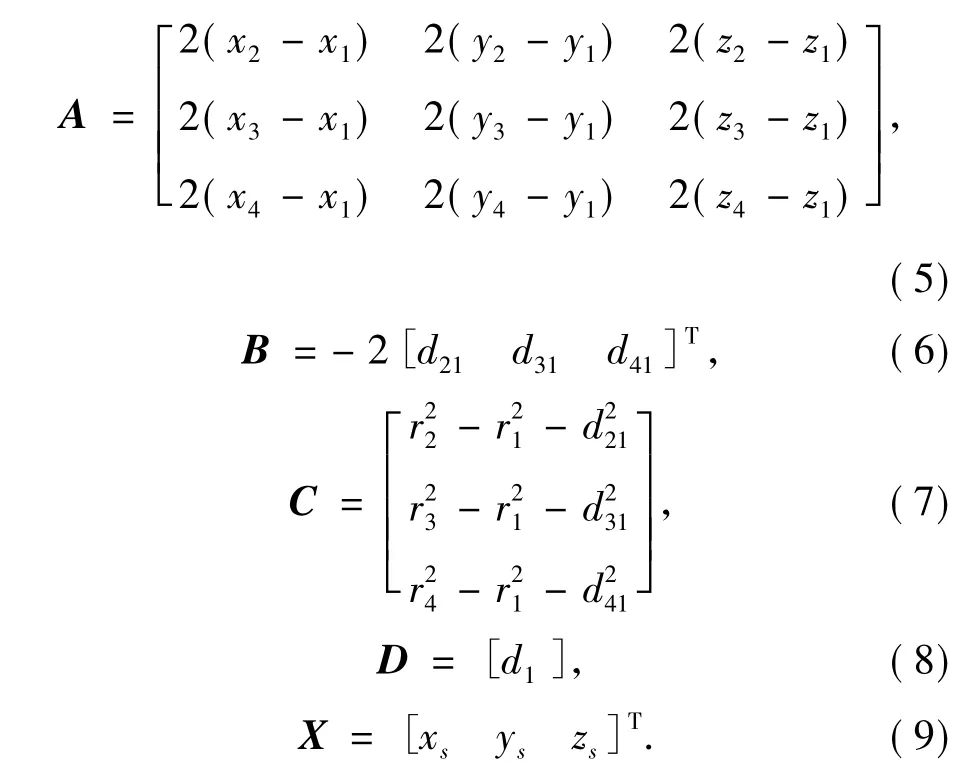
若A的逆矩陣存在,對式(3)中的X求解,得

再令F=A-1B,H=A-1C,K=[x1y1z1],L= FTF-1,N=HTH+KKT-2KH,M=2(FTHFTKT),得

將式(11)代入式(10),即可求得聲源位置(xs,ys,zs).但此時得到的解為雙解,利用陣元5或陣元6的測量數(shù)據(jù)作為判據(jù),便可得到目標(biāo)的真實位置.
任意選取6個陣元中的4個,只要式(3)中A的逆矩陣存在,即可求得一組目標(biāo)位置解,將多組解綜合,可得到更高精度的目標(biāo)三維位置.
3 組合脈沖串設(shè)計
在水聲信道中,上下邊界會引起多途時延擴(kuò)展,在淺水信道下時延擴(kuò)展可達(dá)到300~400 ms.多途時延擴(kuò)展會導(dǎo)致前后脈沖間的相互干擾,增加檢測和估計的難度[8-9].增加脈沖間距雖然會減小這種干擾,卻會使系統(tǒng)幀率降低.本文提出的應(yīng)對方法是設(shè)計一種組合脈沖串,不同頻段的脈沖信號交叉使用,并且前后脈沖的頻率不同,這樣可以在不降低幀率的條件下減小脈沖間干擾.
考慮到水聲信道可用頻帶較窄,組合脈沖串設(shè)計為由12個脈沖、最多7種類型脈沖組合而成,組合脈沖串重復(fù)周期2 s.不同類型的脈沖頻帶互不重疊或頻帶重疊但調(diào)頻斜率極性相反.設(shè)Pi(i=0,1,…,6)為脈沖類型序號.P0為CW脈沖,P1,P2,…,P6均為窄帶LFM脈沖.利用脈沖P0實時測量目標(biāo)高速運動產(chǎn)生的多普勒頻移,來實時調(diào)整與LFM脈沖作相關(guān)處理的參考信號.脈沖P1、P2用作脈沖子序列奇偶標(biāo)識碼,便于不同浮標(biāo)間測得脈沖信號信息的時空關(guān)聯(lián).
脈沖串的序列結(jié)構(gòu)可分別選取如圖3所示的3種結(jié)構(gòu).
上述脈沖序列結(jié)構(gòu)均可將幀率提高12倍,軌跡采樣周期降至0.166 ms.而其中結(jié)構(gòu)1所需的獨立信道數(shù)最少(只需5條),但抗多途能力較結(jié)構(gòu)2和結(jié)構(gòu)3稍差.當(dāng)信道帶寬比較充裕且多途時延擴(kuò)展嚴(yán)重時,可將脈沖序列結(jié)構(gòu)改換為結(jié)構(gòu)2或結(jié)構(gòu)3,其中結(jié)構(gòu)3可抗秒量級的多途擴(kuò)展.
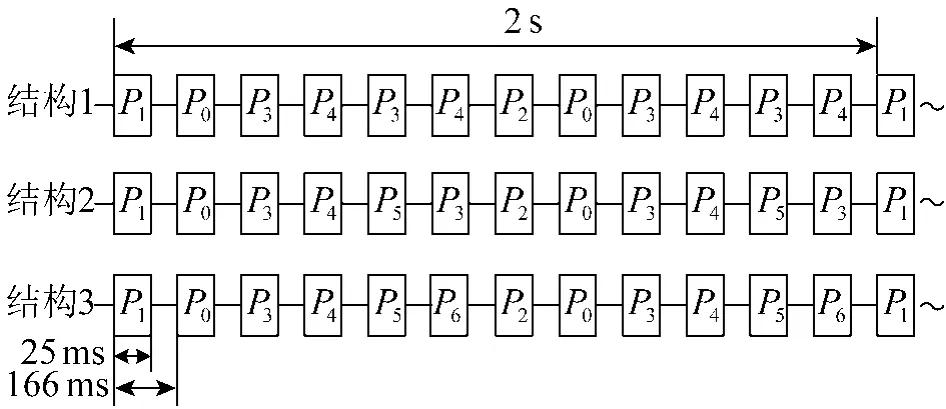
圖3 組合脈沖串的幾種可選序列結(jié)構(gòu)Fig.3 Several optinal structures of combined pulse train
4 信號處理算法
信號處理器采用2類處理器并聯(lián)結(jié)構(gòu),如圖4所示.并行多通道自適應(yīng)陷波器組[10]與瞬時頻率方差檢測器[11]用于CW脈沖的檢測、時延和頻率估計;并行拷貝相關(guān)器組用于多通道LFM脈沖的檢測和時延估計.拷貝相關(guān)器的參考樣本根據(jù)自適應(yīng)濾波器測得的CW脈沖頻率偏移量進(jìn)行實時修正.

圖4 信號處理器Fig.4 Diagram of the signal processor
4.1 并行多通道自適應(yīng)陷波器組
原則上講,僅利用單通道的自適應(yīng)陷波濾波器即可對單頻CW脈沖信號P0進(jìn)行檢測和參數(shù)估計[12].但LFM脈沖信號P1,P2,…,P6雖與P0頻帶不重疊,當(dāng)LFM信號強(qiáng)度較大時,邊帶頻譜分量的串漏仍會使陷波濾波器輸出的包絡(luò)起伏較大,容易引起虛警.對單通道自適應(yīng)陷波濾波器增設(shè)多個陷波通道,分別對應(yīng)幾個LFM脈沖信號的中心頻率,構(gòu)成并行多通道自適應(yīng)陷波器組(如圖5),則可去除LFM脈沖引起的干擾,避免包絡(luò)波動,進(jìn)而顯著改善CW脈沖信號的檢測能力和頻率估計精度.
并行多通道自適應(yīng)陷波器組由多個單頻陷波濾波器并聯(lián)而成.各路的正交參考輸入可表示為

式中:頻率ωi為脈沖信號Pi的中心頻率.各個通道的濾波輸出累加后,與期望信號求差得到殘差,用來調(diào)整各個正交權(quán).
自適應(yīng)迭代過程為
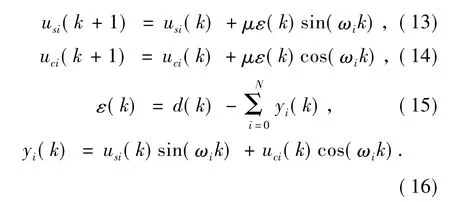
CW信號的包絡(luò)和頻率可在自適應(yīng)濾波器達(dá)到穩(wěn)態(tài)后利用權(quán)值計算得到
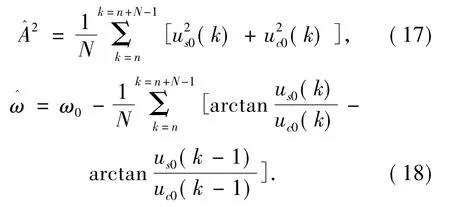
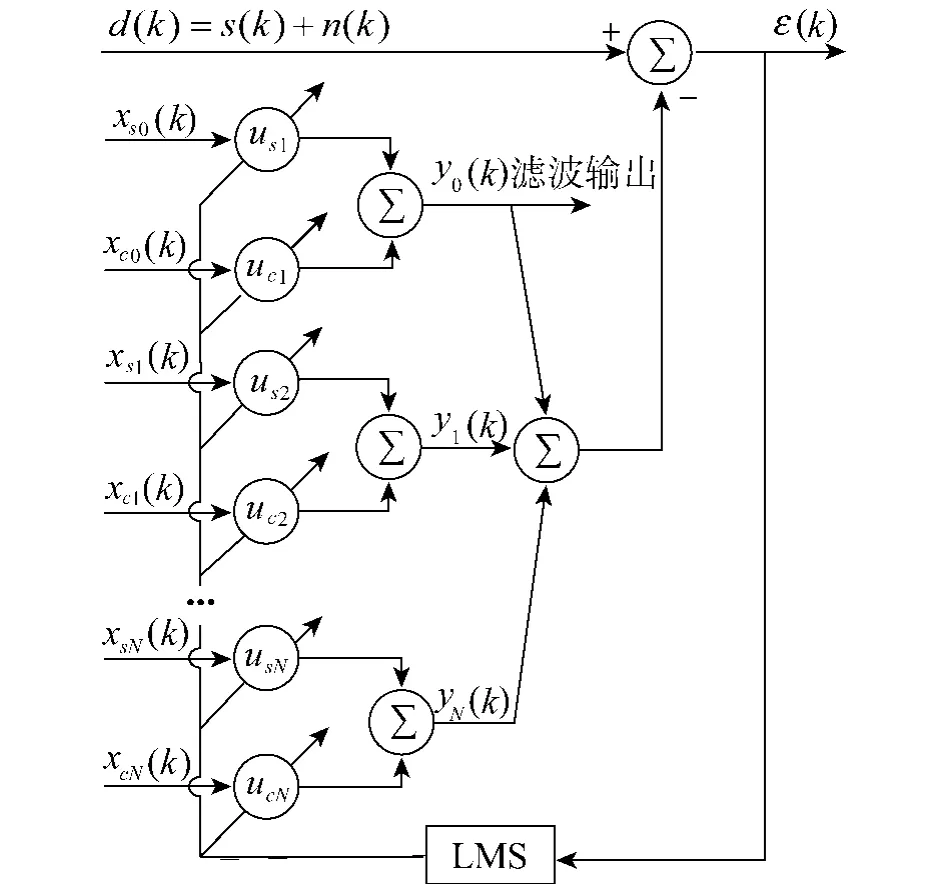
圖5 并行多通道自適應(yīng)陷波器組結(jié)構(gòu)Fig.5 Structure of parallel multi channel adaptive notch filter bank
4.2 并行拷貝相關(guān)器組
通常拷貝相關(guān)器以發(fā)射信號的樣本作為參考信號.而水聽器接收到的信號除加性白噪聲外,往往還存在多普勒、多途等干擾,難以實現(xiàn)參考信號與輸入信號的真正匹配.此外,CW脈沖信號還可能串漏到鄰近頻帶,使相應(yīng)頻帶內(nèi)的LFM信號檢測出現(xiàn)虛警.針對上述問題,在拷貝相關(guān)器設(shè)計中分別采取了應(yīng)對措施.
多普勒效應(yīng)會使拷貝相關(guān)輸出的峰值位置產(chǎn)生偏移,峰值降低,進(jìn)而影響檢測性能和測時精度.所以在信號波形設(shè)計上,除測時精度較高的LFM信號外,還增加了CW脈沖P0,它不僅可作為測時脈沖,其頻率還可給出多普勒頻偏的大小,作為修改拷貝相關(guān)器參考信號頻率的依據(jù),使參考信號和接收信號具有相同的多普勒頻偏.這不僅可提高測時精度,還有助于改善相關(guān)處理效果.
相對于水面來說,水底介質(zhì)往往有更大的聲吸收,同時浮標(biāo)距水面較近,其他途徑的反射聲影響較小,所以水面一次反射是最主要的多途干擾,其他反射聲可暫不考慮.一般水面反射系數(shù)接近于-1,所以水面反射聲的拷貝相關(guān)峰值是負(fù)的,而直達(dá)聲的拷貝相關(guān)峰值是正的,因而在峰選時只要挑選正的最大峰,對應(yīng)的信號就應(yīng)該是直達(dá)聲脈沖,從而可以有效剔除反射聲干擾.
為減小CW脈沖對LFM信號檢測的影響,在并行拷貝相關(guān)器組中增加了CW脈沖的相關(guān)器通道(拷貝相關(guān)器0).各路相關(guān)器輸出在峰選后進(jìn)行峰值比較,若峰值最大的通道是拷貝相關(guān)器0,則為串漏;若峰值最大的是其他通道并且峰值高于相關(guān)峰檢測門限,則判定該脈沖有效,記錄脈沖類型和時延.
并行拷貝相關(guān)器組的結(jié)構(gòu)如圖6所示.
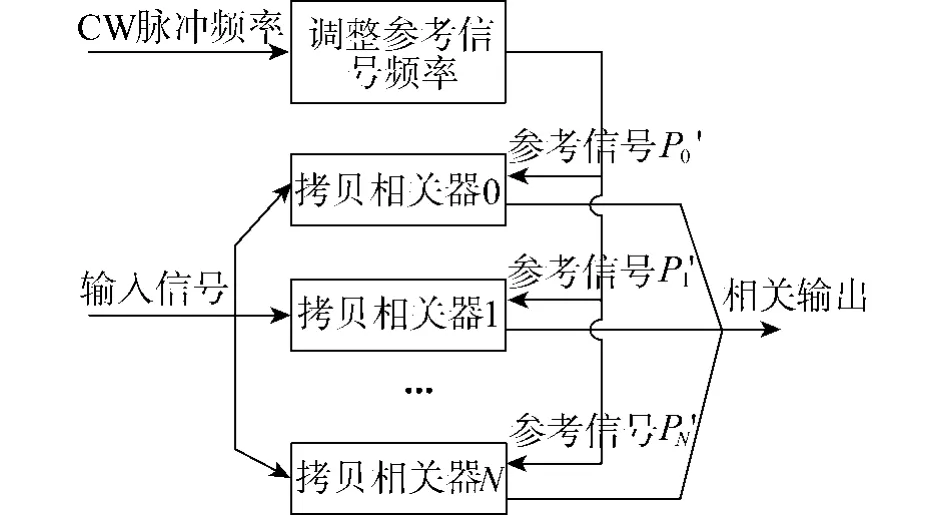
圖6 并行拷貝相關(guān)器組結(jié)構(gòu)Fig.6 Structure of parallel copy correlator bank
5 湖試結(jié)果與分析
2008年8月在湖北平洛湖進(jìn)行了浮標(biāo)陣異步水聲定位系統(tǒng)的湖上試驗.由于湖面較狹窄,試驗中水下僅布放了3個浮標(biāo),浮標(biāo)接收水聽器深度約30 m,構(gòu)成了一個邊長約350 m的三角形測量陣.發(fā)射換能器吊放于目標(biāo)船上,顯控平臺置于湖邊.湖深80~100 m,湖底不平,湖面不甚開闊,聲速剖面如圖7所示.采用結(jié)構(gòu)1的組合脈沖序列,幀周期0.166 s.
下面給出2個條次的湖試三維定位結(jié)果.試驗中目標(biāo)船停機(jī)漂泊,聲源的水平位置基本不變,條次1的聲源深度固定為50 m,條次2的聲源以約1 m/s的速度從深度27 m向下運動至44 m.圖8為系統(tǒng)湖試陣型及條次1水平定位結(jié)果圖,圖9和圖10分別為條次1和條次2的三維定位結(jié)果.統(tǒng)計條次1的水平x軸定位均方根誤差為0.61 m,水平y(tǒng)軸方向定位均方根誤差為0.81 m,垂直深度定位均方根誤差為0.93 m.
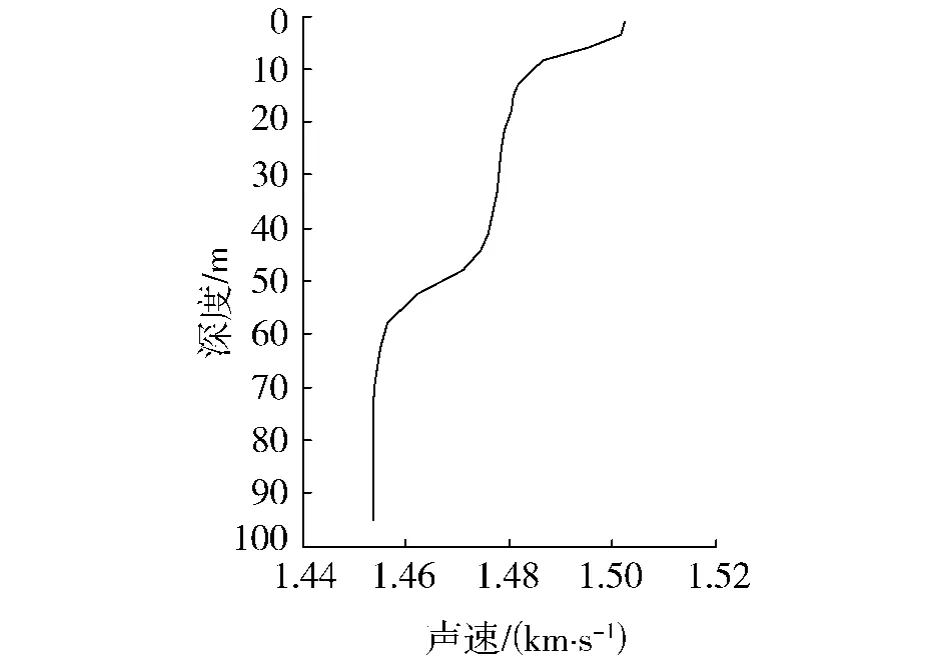
圖7 聲速剖面Fig.7 Sound velocity profile
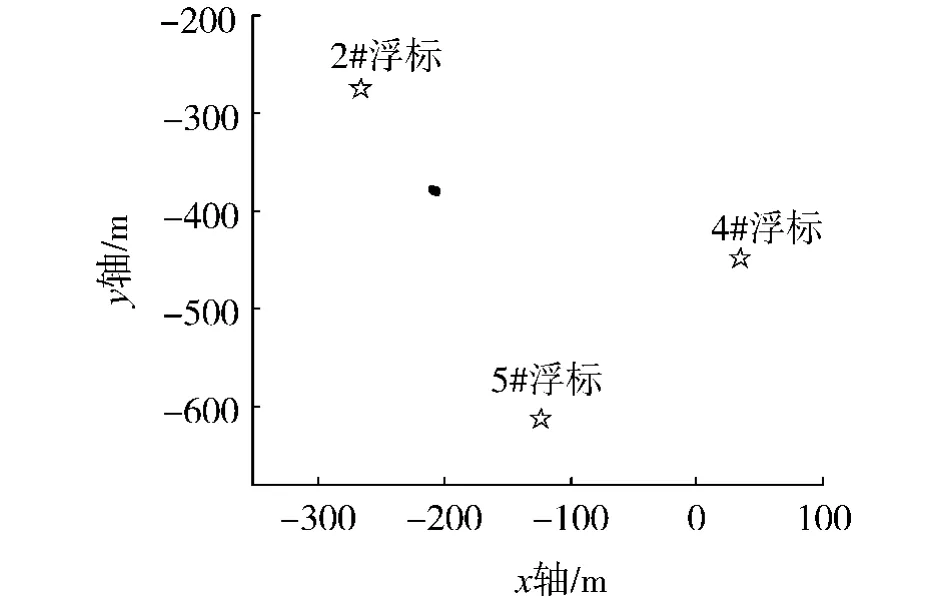
圖8 系統(tǒng)湖試陣型及條次1水平定位結(jié)果Fig.8 Array shape of the system lake trial and the horizontal locationing result of track 1
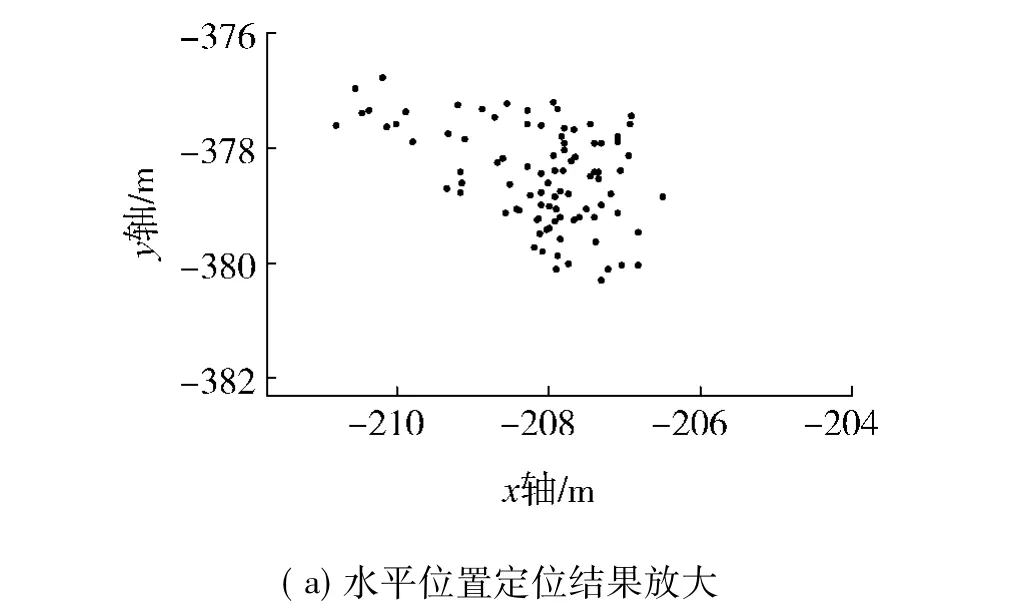
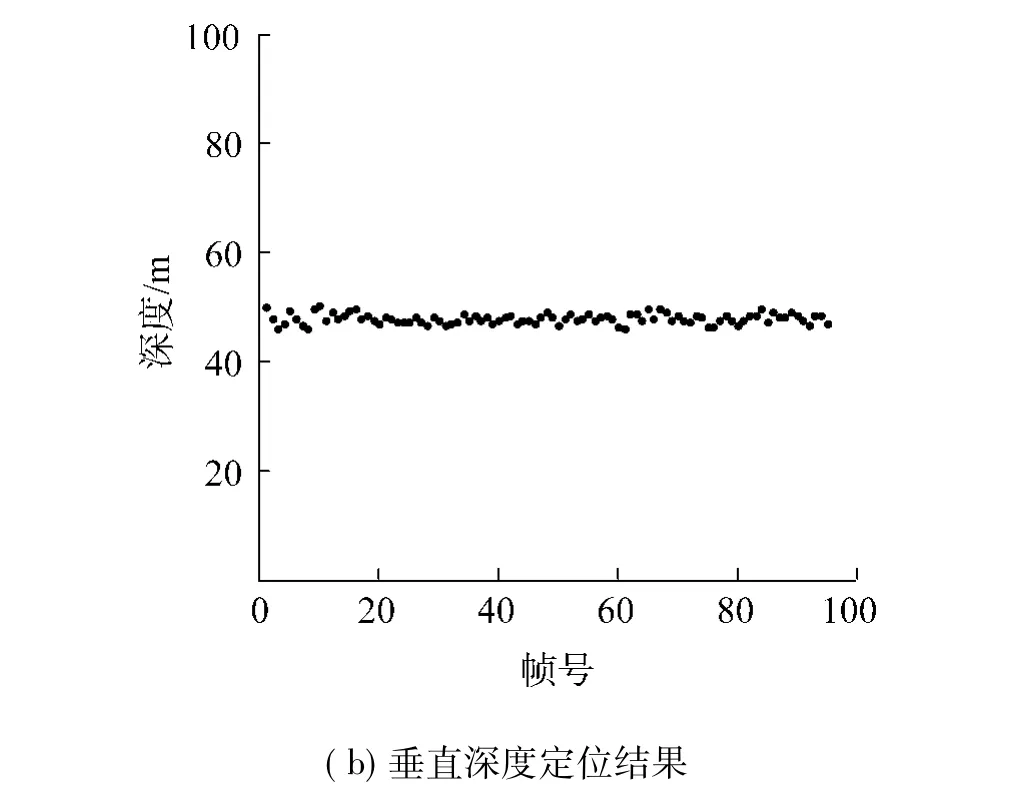
圖9 條次1三維定位結(jié)果Fig.9 3-D localization result of track 1
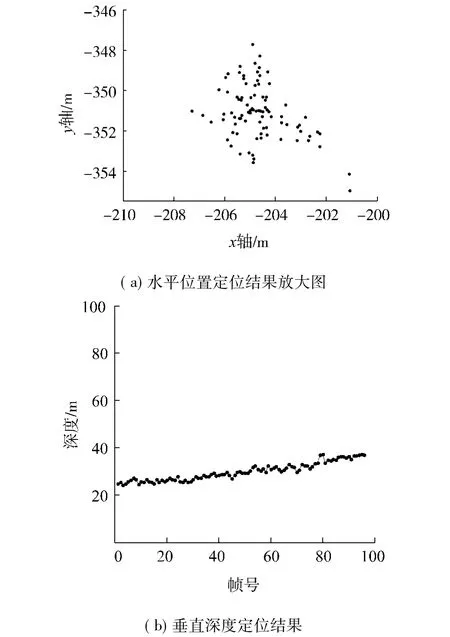
圖10 條次2三維定位結(jié)果Fig.10 3-D localization result of track 2
從湖試結(jié)果看,在未采用任何后置處理手段的條件下,定位系統(tǒng)的水平x、y坐標(biāo)和垂直z坐標(biāo)的測量誤差均小于1 m.采用CW/LFM組合脈沖串,不僅可在無模糊的前提下提高幀率,而且可有效抑制通道間串漏.利用測時精度較高的LFM信號保證了系統(tǒng)定位精度.
6 結(jié)論
通過上述研究與試驗數(shù)據(jù)分析可得如下結(jié)論:
1)提出了一種采用分布式浮標(biāo)陣、基于CW/ LFM組合脈沖串的異步高幀率水聲定位技術(shù),使定位系統(tǒng)在軌跡測量幀率、定位精度、使用可靠性和便利性等方面較當(dāng)前國內(nèi)外的成熟技術(shù)有較大改進(jìn).
2)采用并行多通道自適應(yīng)陷波器組和并行拷貝相關(guān)器組分別用于CW脈沖和LFM脈沖的檢測、時延和頻率估計,可有效抑制通道間串漏和減小多普勒效應(yīng)的影響.
此外,在非等聲速剖面時,采用聲線修正的手段可以獲取更高精度的深度定位結(jié)果.
[1]KENNETH W K,F(xiàn)RNKIE K W.Accurate time delay estimation based passive localization[J].Signal Processing,2009,89(9):1835-1838.
[2]WILLIAMS S M,F(xiàn)RAMPTON K D,AMUNDSON I,SCHMIDT P L.Decentralized acoustic source localization in a distributed sensor network[J].Applied Acoustics,2006,67:996-1008.
[3]KOZICK R J,SADLER B M.Source localization with distributed sensor arrays and partial spatial coherence[J].IEEE Transactions on Signal Processing,2004,52(3):601-616.
[4]THOMSON D,ELSON S.New generation acoustic positioning systems[J].Oceans'02 MTS/IEEE,2002,3:1312-1318.
[5]梁國龍,楊春,王燕.軟件抗距離模糊技術(shù)在異步水聲跟蹤定位中的應(yīng)用分析[J].應(yīng)用聲學(xué),2005,24(6):359-363.
LIANG Guolong,YANG Chun,WANG Yan.Feasibility of resolving range ambiguities by software in an asynchronous underwater acoustic tracking system[J].Applied Acoustics,2005,24(6):359-363.
[6]QUAZI A H.An overview on the time delay estimation in active and passive systems for target localization[J].IEEE Trans Acoust Speech Signal Process,1981,29(3):527-533.
[7]陳曉忠,梁國龍,王逸林,等.非同步水聲定位技術(shù)及其性能評價[J].聲學(xué)學(xué)報,2003,28(4):357-362.
CHEN Xiaozhong,LIANG Guolong,WANG Yilin,et al.Non-synchronous underwater acoustic location and its performance evaluation[J].Acta Acustica,2003,28(4): 357-362.
[8]付進(jìn),梁國龍,張光普.界面反射對定位系統(tǒng)性能影響及應(yīng)對策略研究[J].兵工學(xué)報,2009,30(1):24-29.
FU Jin,LIANG Guolong,ZHANG Guangpu.Influence of interface reflection on positioning performance and restraining technology[J].Acta Armamentrii,2009,30(1):24-29.
[9]ZIELINSKI A,YOON Y H,WU L.Performance analysis of digital acoustic communication in a shallow water[J].IEEE Journal of Oceanic Engineering,1995,20(4):293-299.
[10]付進(jìn),梁國龍.多通道自適應(yīng)陷波濾波器組設(shè)計及性能分析[J].哈爾濱工程大學(xué)學(xué)報,2007,28(9):1030-1035.
FU Jin,LIANG Guolong.Experimental study of heat and mass transfer characteristics on a rotating cylinder surface[J].Journal of Harbin Engineering University,2007,28(9):1030-1035.
[11]梁國龍,惠俊英.瞬時頻率方差檢測器(VIFD)及其性能評價[J].聲學(xué)學(xué)報,1999,24(2):183-190.
LIANG Guolong,HUI Junying.Variance-of-instantaneous frequency detector and its performance evaluation[J].Acta Acustica,1999,24(2):183-190.
[12]XIAO Y,YOSHIAKI T.LMS-based notch filter for the estimation of sinusoidal signals in noise[J].Signal Processing,1995,46(2):223-231.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
