高精度三維GPS控制網(wǎng)的建立與數(shù)據(jù)處理
2011-04-18 10:28:54曾祥新邱蕾王澤民
城市勘測 2011年2期
曾祥新,邱蕾,王澤民
(1.南寧市勘測院,廣西南寧 530021; 2.中國科學(xué)院深圳先進(jìn)技術(shù)研究院,廣東深圳 518055;3.武漢大學(xué)測繪學(xué)院,湖北武漢 430079)
高精度三維GPS控制網(wǎng)的建立與數(shù)據(jù)處理
曾祥新1?,邱蕾2,王澤民3
(1.南寧市勘測院,廣西南寧 530021; 2.中國科學(xué)院深圳先進(jìn)技術(shù)研究院,廣東深圳 518055;3.武漢大學(xué)測繪學(xué)院,湖北武漢 430079)
全面介紹了南寧市城市高精度三維GPS控制網(wǎng)的概況,然后討論了利GAMIT/GLOBK軟件處理控制網(wǎng)的基線處理方案和網(wǎng)平差方案,計算出各個測站在ITRF2005框架下的三維直角坐標(biāo),得出南寧市三維GPS控制網(wǎng)不論從布網(wǎng),還是精度上均達(dá)到甚至優(yōu)于國家B級GPS網(wǎng)的結(jié)論。
基線向量解算;網(wǎng)平差;控制網(wǎng)
GPS定位技術(shù)可以直接精確地測定地面點的三維坐標(biāo),該技術(shù)以其高精度、全天候、高效率等特點而被廣泛應(yīng)用于測繪行業(yè)的各方面。南寧市不同起算點、不同期的GPS控制網(wǎng)間出現(xiàn)縫隙給使用帶來麻煩,且城區(qū)東西跨度近100 km,邊緣投影存在形變問題,同時為了提高現(xiàn)有測繪體系的精度,建立南寧市現(xiàn)代測繪基準(zhǔn)體系已迫在眉睫。
本文結(jié)合南寧市基礎(chǔ)測繪項目,采用GAMIT軟件綜合精密星歷、近軌天體攝動及地球自身規(guī)律性變化等各種因素,對南寧市框架網(wǎng)的連續(xù)觀測數(shù)據(jù)進(jìn)行數(shù)據(jù)處理,得到較理想的結(jié)果,建立了南寧市高精度GPS控制網(wǎng)。
1 控制網(wǎng)概況
南寧市高精度GPS控制網(wǎng)建立分框架網(wǎng)(B級網(wǎng))和基本控制網(wǎng)(C級網(wǎng))二級進(jìn)行。B級網(wǎng)有12個點,平均站間距30 km~40 km,其中5點為南寧市連續(xù)運行衛(wèi)星定位服務(wù)系統(tǒng)(NNCORS)基準(zhǔn)站點,構(gòu)成GPS控制網(wǎng)的框架。在B級框架網(wǎng)的基礎(chǔ)上布設(shè)C級GPS控制網(wǎng)共184個點,點間距約5 km~12 km,盡可能將測區(qū)范圍內(nèi)已有等級控制點如一、二等三角點、國家GPS網(wǎng)點、原城市控制網(wǎng)等級點納入。采用GPS技術(shù)進(jìn)行了觀測,共采用12臺雙頻GPS接收機(jī),B級網(wǎng)共觀測了26 d,采樣間隔1 s,C級網(wǎng)觀測26個時段,每個時段8 h,采樣間隔15 s。
2 GPS控制網(wǎng)基線向量解算
基線處理采用美國麻省理工學(xué)院和Scripps研究所共同研制的GAMIT 10.31軟件。基線處理分兩步進(jìn)行,首先是框架網(wǎng)(B級網(wǎng))的基線處理,其次是C級網(wǎng)的基線處理。框架網(wǎng)(B級網(wǎng))與C級網(wǎng)基線處理的方法基本相同,不同之處在于:框架網(wǎng)聯(lián)測IGS跟蹤站,而對于C級GPS網(wǎng),則以精確的框架點坐標(biāo)為基準(zhǔn),先從有框架點的同步觀測網(wǎng)開始解算,然后用推算得到的未知測站的坐標(biāo)作為基準(zhǔn)來解算相鄰的同步觀測網(wǎng),乃至整個GPS控制網(wǎng)。
2.1 基線解算的主要模型和參數(shù)
采用GAMIT軟件對所有基線進(jìn)行分天處理,首先對原始數(shù)據(jù)進(jìn)行周跳探測和修復(fù),刪除粗差后生成干凈的觀測數(shù)據(jù)文件(X文件),然后根據(jù)IGS精密星歷進(jìn)行軌道積分、生成觀測方程和解算基線,最后得出單天解。
在單天基線解算時考慮的主要因素包括:協(xié)議慣性參考系采用J2000;衛(wèi)星鐘差的模型改正用IGS精密星歷中的鐘差參數(shù);接收機(jī)鐘差的模型改正(用根據(jù)偽距觀測值計算出的鐘差);接收機(jī)鐘差的模型改正用根據(jù)偽距觀測值計算的鐘差;電離層折射影響用LC觀測值消除;對流層折射根據(jù)標(biāo)準(zhǔn)大氣模型用Saastamoinen模型改正,對流層天頂距延遲每2 h設(shè)置一個;衛(wèi)星和接收機(jī)天線相位中心進(jìn)行改正,天線L1、L2相位中心偏差采用GAMIT軟件的默認(rèn)值;測站位置的潮汐改正采用全球潮汐格網(wǎng)進(jìn)行內(nèi)插;衛(wèi)星軌道改進(jìn)使用GAMIT標(biāo)準(zhǔn)力模型,求解衛(wèi)星軌道初值,光壓模型采用BERNE模型解算;衛(wèi)星截止高度角為15°,歷元間隔為1 s,C級網(wǎng)歷元間隔為15 s,衛(wèi)星軌道誤差不考慮,即固定IGS軌道定位。
另外為了引入基準(zhǔn)條件,從IGS網(wǎng)站上下載了約5個IGS跟蹤站的觀測數(shù)據(jù),與所在區(qū)域的觀測站一并處理。其中框架網(wǎng)聯(lián)測的IGS站和坐標(biāo)基準(zhǔn)如表1所示。這些IGS跟蹤站的位置精度并不一致,對其中坐標(biāo)精度較高的觀測站SHAO,WUHN,KUNM采用強(qiáng)約束(X,Y,Z方向的約束值分別為1 cm,1 cm,1 cm),其他IGS測站采用松約束,其目的在于利用多余觀測站進(jìn)行檢查整網(wǎng)的數(shù)據(jù)解算結(jié)果是否正確。

NNCORS框架網(wǎng)基線解算方案 表1
2.2 基線處理的精度統(tǒng)計與結(jié)果分析
基線的精度是衡量基線質(zhì)量的標(biāo)準(zhǔn),因而在同步圖形基線處理完畢后,需要對控制網(wǎng)中的基線及基線中各分量的精度、同步環(huán)、異步環(huán)閉合差以及重復(fù)基線進(jìn)行統(tǒng)計分析。
(1)同步環(huán)檢核
對于GAMIT軟件基線解的同步環(huán)檢核,可以把基線解的nrms值作為同步環(huán)質(zhì)量好壞的一個指標(biāo),一般要求nrms值小于0.5,不能大于1.0,若nrms值小于0.3表明基線解的質(zhì)量很好。26個單天解的nrms在圖1中繪出。從圖中可以看出,南寧市GPS框架網(wǎng)中的NNCORS參考站點共解算了26個同步時段,基線解的nrms值全部小于0.3,結(jié)果表明GPS網(wǎng)的外業(yè)觀測整體質(zhì)量很高,基線解算的精度也很好。

圖1 NNCORS參考站點共解算了26個同步時段單天解的nrms序列
(2)異步環(huán)閉合差和重復(fù)基線
異步環(huán)閉合差反映了整個GPS網(wǎng)的外業(yè)觀測質(zhì)量和基線解算質(zhì)量的可靠性,相對于同步環(huán)閉合差,異步環(huán)閉合差對GPS成果質(zhì)量更為重要。異步環(huán)閉合差應(yīng)滿足:
按照B級網(wǎng)的相關(guān)標(biāo)準(zhǔn)(a=8 mm,b=1 ppm),對框架網(wǎng)和C級網(wǎng)進(jìn)行檢核。在檢核的異步環(huán)中,所有的異步環(huán)閉合差都小于《全球定位系統(tǒng)(GPS)測量規(guī)范》的要求。重復(fù)基線差最大的基線,其相對精度為0.05 ppm,滿足本項目技術(shù)設(shè)計和規(guī)范要求。
3 GPS網(wǎng)平差
ITRF框架下網(wǎng)平差的目的是通過與國際IGS跟蹤站的聯(lián)合處理,將ITRF框架基準(zhǔn)分別傳遞至框架網(wǎng)和C級GPS網(wǎng),建立三維地心基準(zhǔn),同時將高精度三維城市控制網(wǎng)與國際IGS站聯(lián)結(jié)起來。其過程分兩步進(jìn)行,第一步進(jìn)行框架網(wǎng)平差,由全球IGS站的ITRF2005坐標(biāo)為基準(zhǔn),確定框架點的坐標(biāo);第二步進(jìn)行C級網(wǎng)平差,以框架點的坐標(biāo)為基準(zhǔn),確定C級GPS點的坐標(biāo),網(wǎng)平差軟件采用科傻GPS數(shù)據(jù)處理系統(tǒng)5.1。
3.1 框架網(wǎng)平差
在框架網(wǎng)平差中固定IGS基準(zhǔn)站,平差后基線的相對精度水平方向達(dá)到10-9,垂直方向優(yōu)于10-8。點位精度在表2中列出。平差時采用科傻GPS數(shù)據(jù)處理系統(tǒng)5.1,處理26天的NNCORS基準(zhǔn)站5點與國際IGS站點之間基線,并把ITRF2005框架瞬時歷元坐標(biāo)從國際IGS站傳遞到NNCORS基準(zhǔn)站,從表2中可見5個NNCORS基準(zhǔn)站的點位精度y方向為1.6 mm,x方向和z方向精度均高于1 mm。
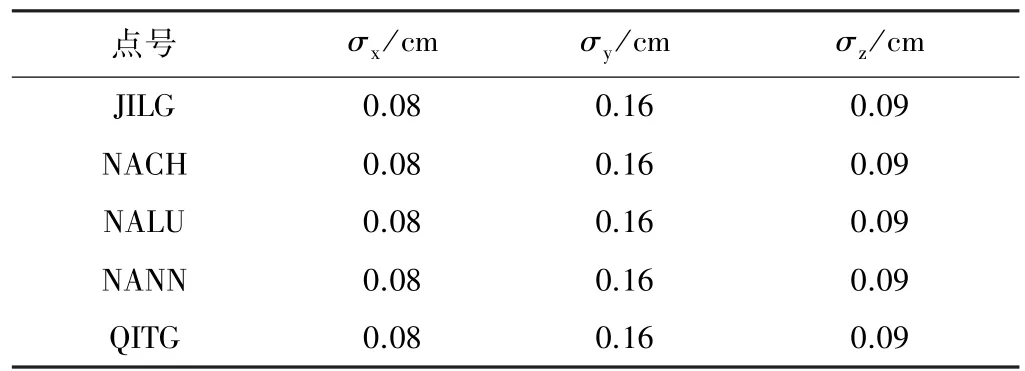
點位精度 表2
3.2 C級GPS網(wǎng)平差
C級GPS網(wǎng)平差在ITRF2005框架下的平差,以NNCORS 5個參考站的高精度ITRF 2005坐標(biāo)為起算點進(jìn)行全網(wǎng)平差。為了保證整個GPS網(wǎng)的精度均勻以及平差嚴(yán)密,特意把另外觀測了3晝夜的7個框架點以及所有C級GPS網(wǎng)點進(jìn)行一并平差。表3、表4分別為C級GPS網(wǎng)三維無約束平差基線向量改正數(shù)及改正數(shù)區(qū)間分布統(tǒng)計,圖2為基線向量改正數(shù)在各個方向的分布圖。從表3表4和圖2可知,網(wǎng)平差得到的基線觀測量坐標(biāo)分量改正數(shù)較小,C級GPS網(wǎng)觀測質(zhì)量良好,平差基線內(nèi)符合精度高。
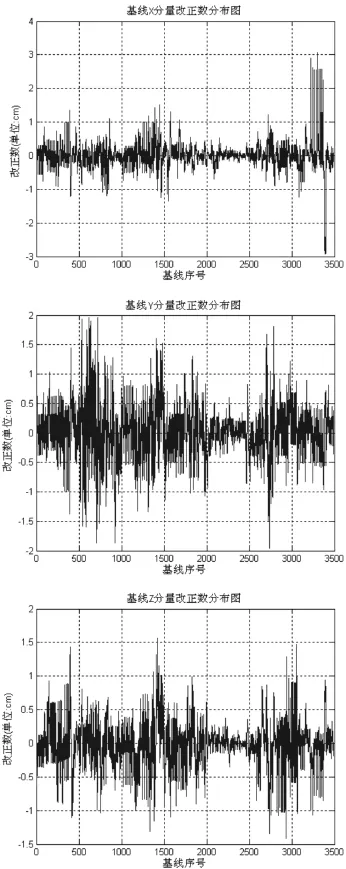
圖2 基線分量改正數(shù)分布圖
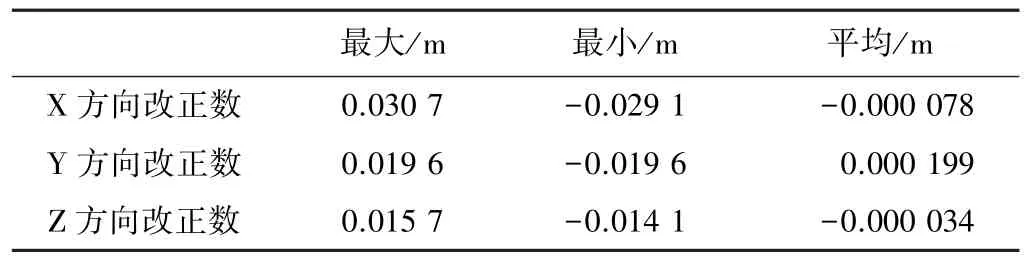
C級網(wǎng)平差基線向量改正數(shù)統(tǒng)計 表3
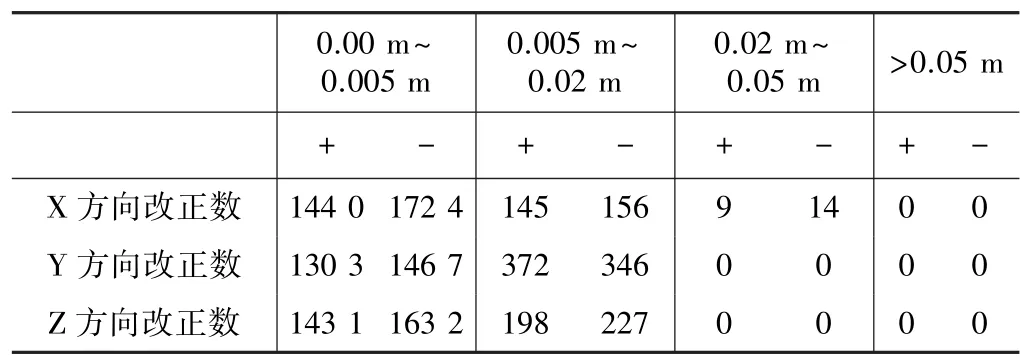
改正數(shù)區(qū)間分布統(tǒng)計 表4
南寧市C級GPS控制網(wǎng)三維約束平差以5個NNCORS基準(zhǔn)站,即QITG、NALU、NANN、NACH、JILG為起算基準(zhǔn)。C級網(wǎng)整網(wǎng)進(jìn)行平差后,C級網(wǎng)的平均邊長為24.468 km,平均相對精度為0.035 ppm,最弱邊相對精度為1.10 ppm,邊長為0.940 9 km。坐標(biāo)分量在水平方向上的平均精度為0.000 5 m,大地高方向為0.003 m。最弱點水平精度為0.007 m,大地高精度為0.016 m。表5、表6、表7為C級GPS網(wǎng)點位精度統(tǒng)計表。

C級網(wǎng)三維約束平差邊長相對中誤差區(qū)間分布統(tǒng)計 表5
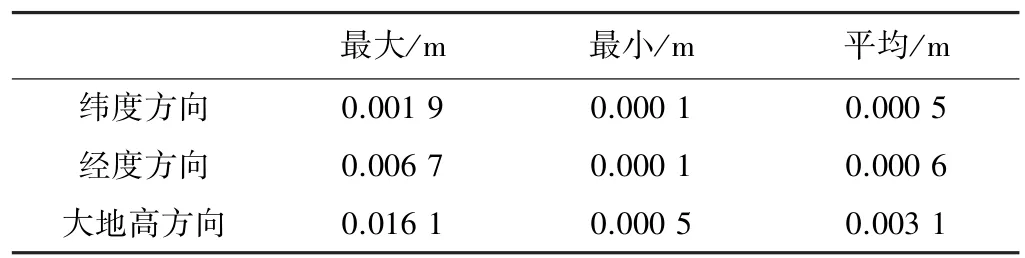
C級網(wǎng)三維約束平差點位精度中誤差統(tǒng)計 表6
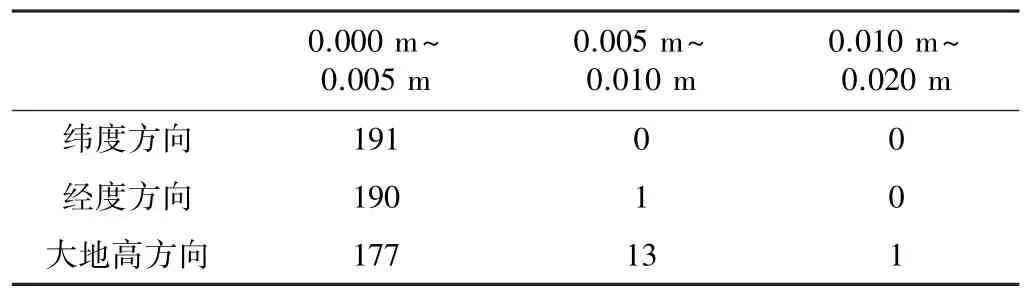
C級網(wǎng)三維約束平差點位精度中誤差區(qū)間分布統(tǒng)計 表7
4 結(jié)論與建議
根據(jù)上述比較分析,可得出如下結(jié)論:南寧市高精度GPS網(wǎng)點布設(shè)比較合理,圖形結(jié)構(gòu)好,因此提高了該地區(qū)的三維控制網(wǎng)精度;解算的基線向量用同步環(huán)和異步環(huán)進(jìn)行檢測,質(zhì)量高。從平差結(jié)果來看,南寧市C級GPS控制網(wǎng)ITRF框架下三維約束平差無論是在點位精度,還是基線改正數(shù)以及基線相對中誤差等方面均達(dá)到或超過了規(guī)范和技術(shù)設(shè)計書有關(guān)C級GPS網(wǎng)的相關(guān)精度要求,為區(qū)域似大地水準(zhǔn)面精化提供高精度三維大地坐標(biāo)數(shù)據(jù)。
[1] 寧津生,劉經(jīng)南,陳俊勇等.現(xiàn)代大地測量理論與技術(shù)[M].武漢:武漢大學(xué)出版社,2006
[2] 董鴻聞,李國智,陳士銀.地理空間定位基準(zhǔn)及其應(yīng)用[M].武漢:測繪出版社,2005
[3] 佘佐明.建立貴陽市高精度測繪基準(zhǔn)的研究與思考[J].城市勘測,2008,6:18~21
[4] 于建城,郭春喜.天津市二等三角網(wǎng)改造數(shù)據(jù)處理[J].城市勘測,2007,3:28~31
[5] 施寶湘.寧波市第二代GPS控制網(wǎng)的實踐與探討[J].城市勘測,2005,1:21~23
[6] 肖建華.中國城市勘測工作50年論文集[M].武漢:測繪出版社,2004
[7] 洪立波,金善焜等.城市測量手冊[M].北京:中國建筑工業(yè)出版社,1999
Establishment and Data Processing of Three-dimensional GPS Control Network
Zeng XiangXin1,Qiu Lei2,Wang ZeMin3
(1.Nanning Exploration&Survey Institute,Nanning 530021;2.Shenzhen Institutes of Advanced Technology,Chinese Academy of Sciences,Shenzhen,518055;3.School of Geodesy and Geomatics,Wuhan 430079)
The high-precision three-dimensional GPS network in Nanning is firstly introduced and then the baseline processing method and network adjustment program using the GAMIT/GLOBK software are discussed in the paper.The three-dimensional Cartesian coordinates under ITRF2005 are obtained by the software.And the conclusion is that threedimensional GPS control network in Nanning,whether from the distribution of the network,or accuracy are achieved even better than the national B-level GPS Network conclusions.
Baseline vector;Network adjustment;Control Network
1672-8262(2011)02-61-04
P228
A
2010—06—09
曾祥新(1966—),男,高級工程師,主要從事工程測量工作。
南寧市科學(xué)技術(shù)局(南寧市高精度三維GPS控制網(wǎng)的建立及似大地水準(zhǔn)面精化,20082019A)
猜你喜歡
中小學(xué)校長(2021年9期)2021-10-14 14:36:14
瘋狂英語(雙語世界)(2021年2期)2021-07-03 11:10:26
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發(fā)展導(dǎo)向(2019年10期)2019-08-24 06:25:28
寶藏(2019年3期)2019-03-28 05:24:16
寶藏(2019年3期)2019-03-28 05:24:16
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
衛(wèi)星與網(wǎng)絡(luò)(2015年12期)2015-10-27 02:21:46
