基于感應電機控制系統的變結構模糊神經網絡控制
2011-05-11 03:25:16劉偉
制造業自動化 2011年7期
劉 偉
(江蘇技術師范學院 電氣信息工程學院,常州 213001)
基于感應電機控制系統的變結構模糊神經網絡控制
劉 偉
(江蘇技術師范學院 電氣信息工程學院,常州 213001)
0 引言
交流伺服系統當中的感應電動機是高階、強耦合、非線性的,由于其參數是時變的、以及在負載干擾等非線性因素的影響下,實際系統很難用其精確的數學模型來描述。而感應電動機以其容量體積比高,過載能力強,輸出轉矩大,無電刷,無需經常維護等優點而得到越來越多地廣泛應用。
交流伺服系統一般是以足夠的位置控制精度(定位精度)、位置跟蹤精度(位置跟蹤誤差)和足夠的跟蹤速度來作為它的主要控制目標。常規的變結構控制以及模糊監督控制都有一個共同的問題,就是“抖振”現象。為了克服這個問題,有人研究過模糊變結構控制[1]。基于感應電動機解耦數學模型而提出的解耦變結構控制原理也是一種新型的交流控制策略[2,3],其解耦變結構控制器的設計方法不需要被控制對象有精確的數學模型,且能有很好的抗干擾性和很強的魯棒性。如在解耦變結構系統中加入模糊控制,更能有效地抑制和消除抖振,提高控制系統的性能[3]。
模糊神經網絡結合了模糊控制與神經網絡兩者的優勢,使控制系統具有模糊推理和自學習、自組織的能力,變結構模糊神經網絡通過在訓練中不斷調整網絡結構,一方面提高了網絡的收斂速度,找到網絡的較佳結構,另一方面又可以有效地克服一般神經網絡容易陷入局部值的難題[4]。
1 交流解耦變結構控制
基于對稱鼠籠式感應電動機在同步軸系之中的數學模型,可以導出易于實現的解耦條件以及為實現定子側的完全解耦所需的控制。
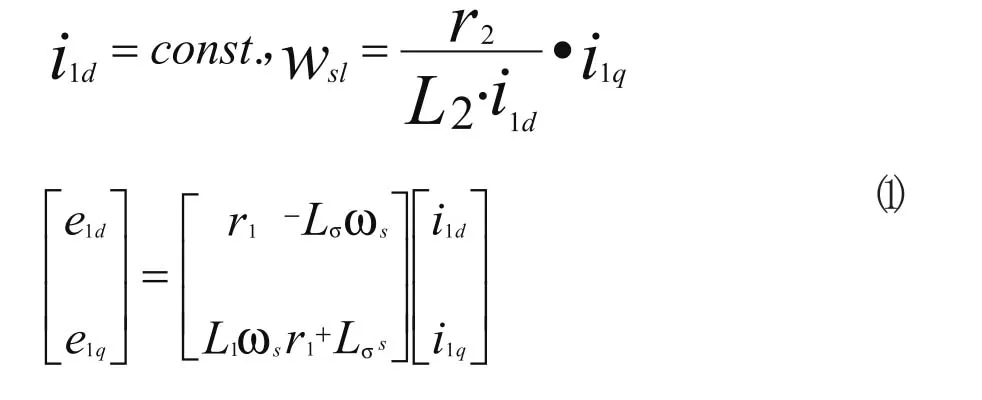
其中,ild,i1q為定子電流的d,q軸分量,ωsl為滑差頻率;r1,L1為定子電阻和電感;;r2,L2為轉子電阻和電感;Lσ為定轉子間漏抗,且Lσ=σL1,σ=1-k2,k為定轉子間耦合系數;ωs為電源頻率;e1d,e1q分別為電機電勢在d,q軸的分量[3,4]。
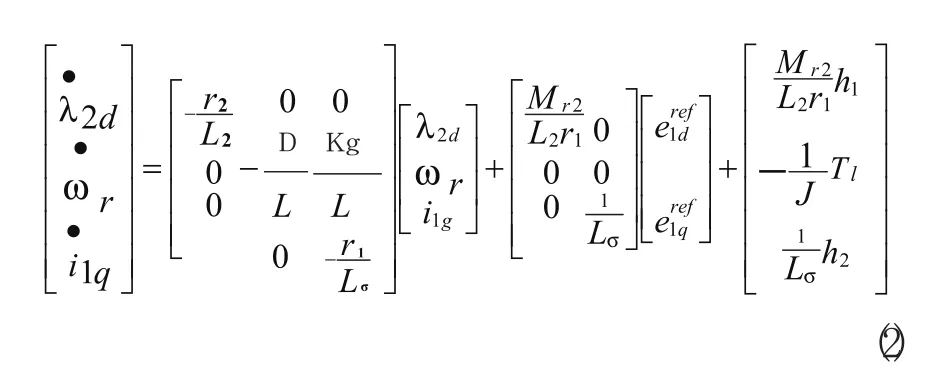
由于r2容易隨溫度變化而發生變化,從而影響了解耦控制系統的性能,轉子電阻的變化對解耦控制的影響可以作為干擾量h1,h2。感應電動機在完全解耦條件下的數學模型為:


2 變結構模糊神經網絡控制
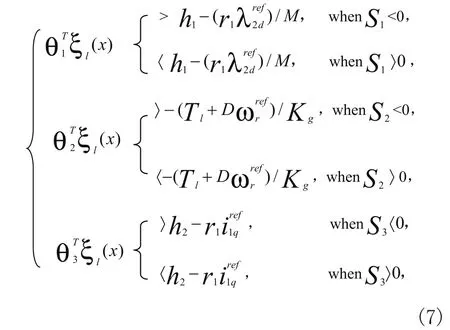
解耦變結構控制策略采用如下的控制規律:

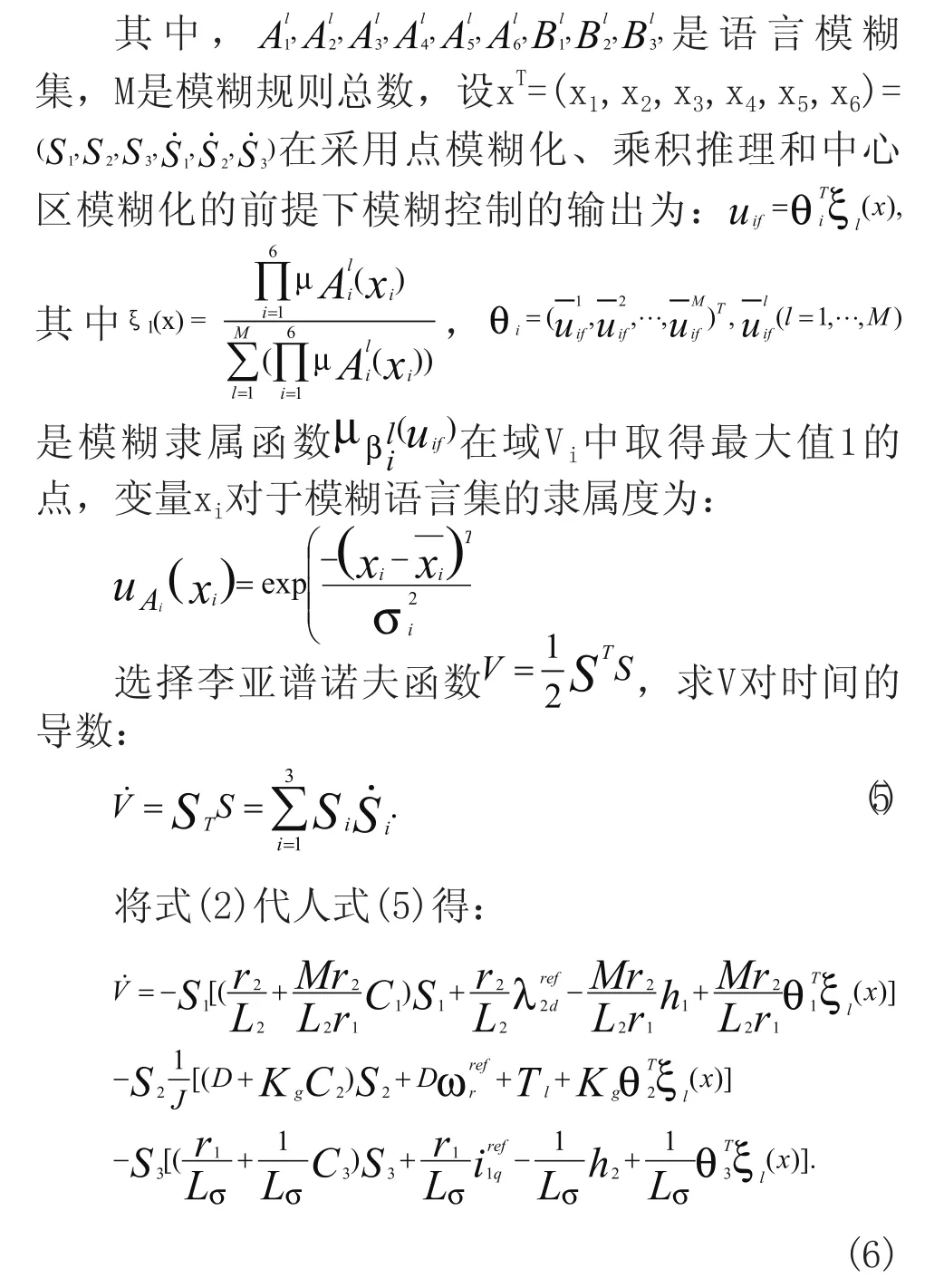
式中,C是控制參數針,uif(i=1,2,3)是模糊控制量。
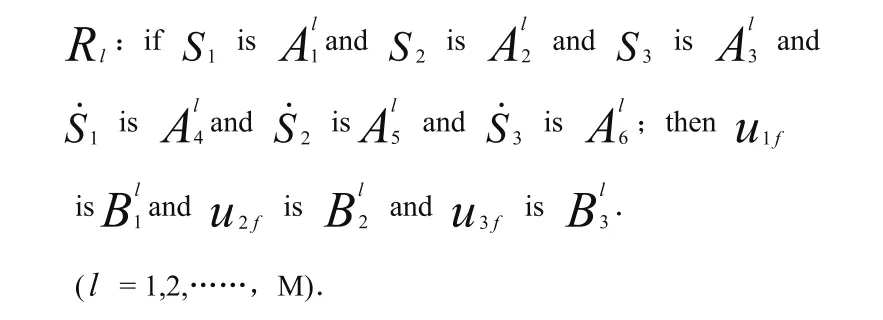
在采用模糊控制的解耦變結構系統中,采用如下的模糊控制規則:
1)C是正定陣;
2)
模糊控制采用變結構模糊神經網絡來實現,采用變結構模糊神經網絡的交流解耦變結構控制系統的結構如圖1所示。
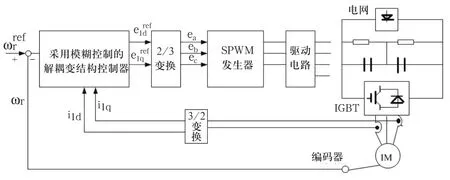
圖1 變結構模糊神經網絡的交流解耦變結構控制系統的結構圖
變結構模糊神經網絡控制器結構如圖2所示。
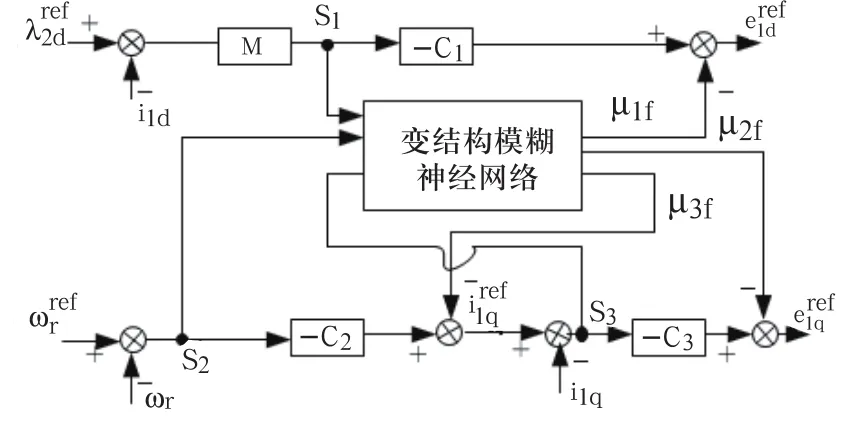
圖2 變結構模糊神經網絡控制器結構圖
3 模糊神經網絡與模糊規則的調整
變結構模糊神經網絡(VS-FNN)控制器是三層前向網絡,由于隱層節點數影響神經網絡的收斂速度以及神經網絡是否收斂于局部極值點,在神經網絡學習過程中改變隱層節點的方法,可以提高神經網絡的收斂速度,并有效地避免了神經網絡陷入局部極值。隱層的節點數由少到多的變結構過程是模糊規則由粗到精的學習過程,體現了先粗略掌握學習對象的概貌,然后不斷細分,不斷提高學習精度的學習規律,變結構模糊神經網絡的結構如圖3所示。
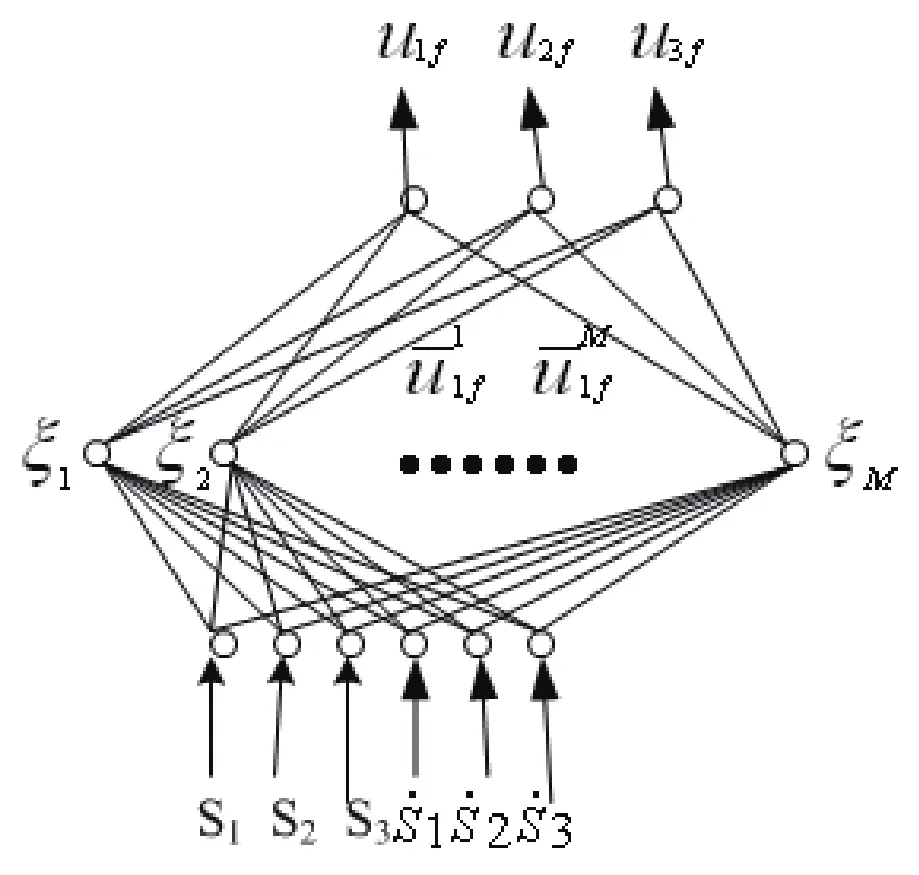
圖3 變結構模糊神經網絡圖

對于變結構模糊神經網絡(VS-FNN)的隱層,有輸入輸出方程:
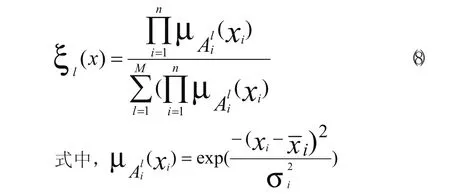
對于比昂模糊神經網絡(VS-FNN)的輸出層,有輸入輸出方程:
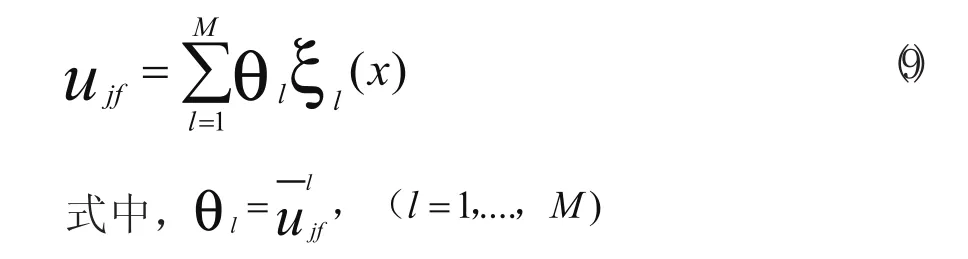
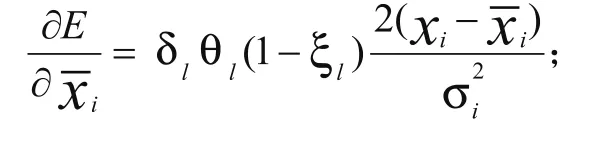
計算變結構模糊神經網絡(VS-FNN)的輸出層參數θl的梯度,有:

設ξ為網絡輸出的誤差平方和,D是網絡衰減率,則有
式中,yik,分別是輸出層第i個節點的時間輸出與期望輸出,k為訓練樣本序號,ξ(N),ξ(N+M)分別是第N步與第(N+M)步訓練的誤差平方和。設Ep為減去第p個節點后的平方和,則有:
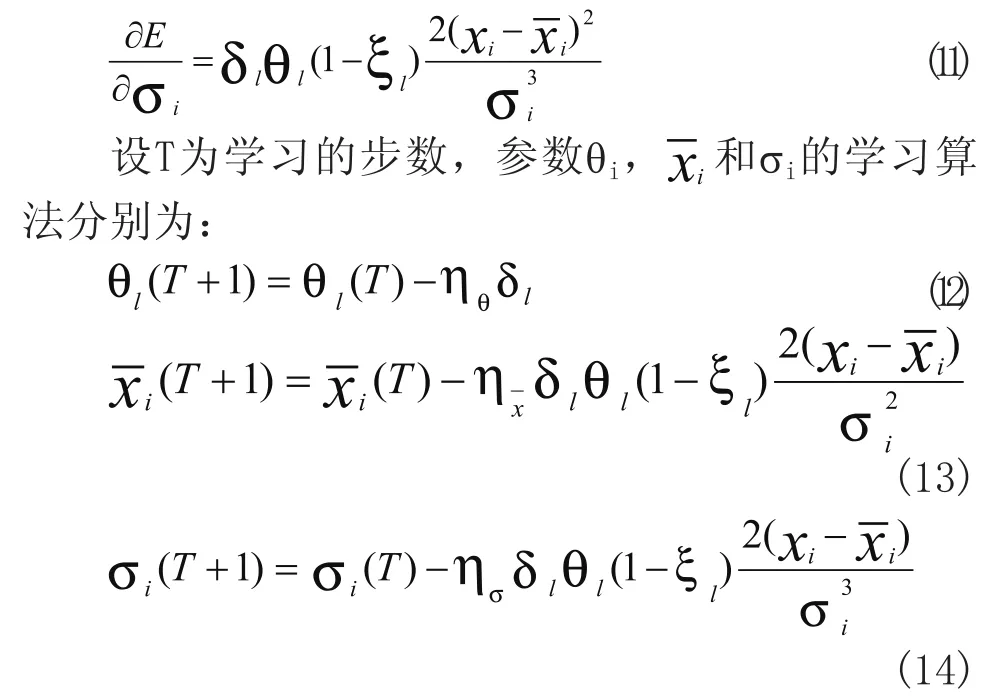
變結構學習算法可歸納為:
第1步 設定ξ>0為給定的誤差平方和收斂閥值,[D1,D2]為網絡衰減率的適度范圍,網絡隱層節點數初值為P0。
第2步 設第N步與第(N+M)步訓練后的誤差平方和與衰減率分別為ξ(N),D(N)與ξ(N+M),D(N+M)。在第(N+M)步穩層結構應為:PN+1
1)假如D(N+M)>D2,表明網絡收斂速度快,網絡結構保持不變;
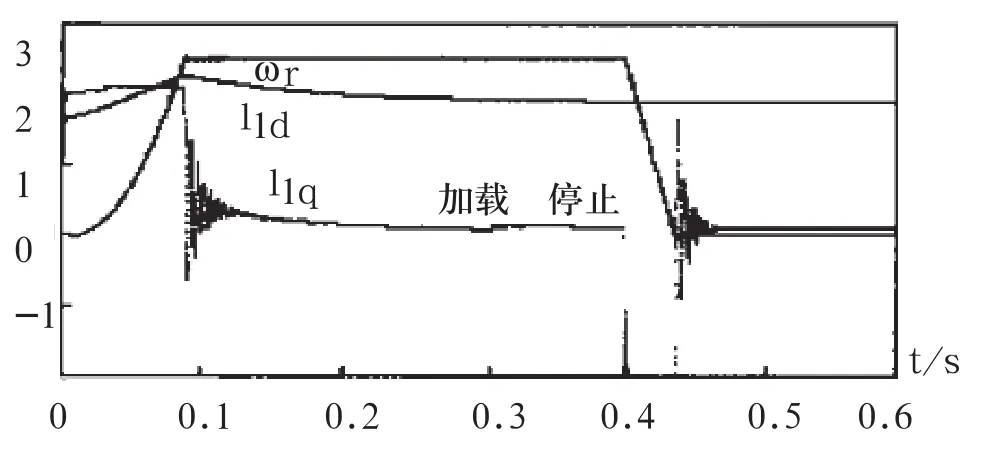
2)假如D(N+M) 3)假如D(N+M)∈[D1,D2],網絡收斂速度在適度范圍,如果D(N+M) 一般改變網絡結構會瞬間增大誤差,因此新增節點的連接權值應取適當方位的隨機值,假如增節點并經M步訓練后D(M+N) 本控制系統采用的感應電動機參數:r1=0.49?,r2=0.45?,L1=38.8mH,L2=36.7mH,M=35.4mH,J=0.024N.m.S2/rad,D=0.0011N.m.S2/rad, i1d=6.83A,i1q=11.54A,P=1KW,U=100V,I=8.4A,W=60Hz,NP=4極,n=1710rpm。 我們采用計算機軟件MATLAB對以上感應電動機進行了仿真實驗,仿真結果如圖4所示。 圖4 電機參數為額定值的仿真曲線 圖4為電機參數為額定值的仿真曲線,起制動轉速ωr在接近最大轉矩的作用下快速起動和制動,轉速上升時間為0.075s,制動時間僅需0.034s,勵磁電流ild上升時間極短,僅為0.009s,達到穩定后基本上保持穩定狀態,即勵磁基本保持不變。轉速ωr除在起制動接近期望值是有短時較小的抖振外,基本上使轉速、勵磁電流和轉矩電流的抖振得到有效地抑制,即使負載突變時轉速和勵磁電流仍保持不變,說明系統的抗干擾能力較強。 本控制系統具有較高的智能性和很好的魯棒性,有自學習和自調整模糊規則的能力,系統的動靜態性能較好,實現了感應電動機的快速和簡單的控制。本文采用變結構模糊神經網絡方法,實現了感應電動機的解耦變結構控制,利用神經網絡的信息分布存儲和并行快速計算能力,實現了模糊控制規則的自動提取和存儲,并實現了并行模糊推理,使系統具有模糊控制特性,從而有效地抑制了系統“抖振”的特性。這就是筆者在交流伺服系統中的一種研究嘗試,仍有不足之處,如軟件實現的模糊神經網絡控制,其并行模糊推理的速度會受到影響,在自學習、自組織方面還需進一步完善。僅拋出此方法與同仁們共勉,希望同仁們進一步努力,逐步將新的控制算法付諸于實際系統中,并有更好的實時性。 [1]劉偉.模糊變結構控制在交流伺服系統中的應用[J].電氣自動化,2005,27(6):10-12. [2]邱煥耀,毛宗源.采用模糊控制的感應電動機解耦變結構系統的研究[J].自動化學報,1998,24(3):391-394. [3]邱煥耀,毛宗源.感應電動機解耦變結構控制系統抖振和消除的研究[J].自動化學報,1994,20(2):169-176. [4]邱煥耀,毛宗源,姚菁.解耦變結構交流速度控制系統的研究[J].控制理論與應用,1992,9(5):512-518. [5]邱煥耀,毛宗源,姚菁.解耦變結構調速系統的研究[J].冶金自動化,1992,16(5):47-48. [6]王隆杰,毛宗源.利用神經網絡進行推理的模糊控制器[J].控制理論與應用,1994,11(4):508-512. [7]Wang Lixing.Adaptive Fuzzy System and Control,Design and Stabd Analysis.London:PTR Prentice Hall,Inc.,1994. According to respond changing of electrical engineering control system structure the misty nerve network control LIU Wei 感應電動機是高階、強耦合、非線性的被控制對象,它具有容量體積比高,過載能力強,輸出轉矩大,無電刷,無需經常維護等優點。在感應電動機的控制中采用解耦變結構控制,可有效地簡化了控制器的設計,并提高了控制器的抗干擾性和魯棒性,而在交流解耦變結構系統中進一步應用變結構模糊神經網絡,一方面使系統原來存在的抖振現象得以抑制,另一方面又使系統具有自學習和自調整模糊規則的能力,從而提高和改善了控制系統的性能。 變結構模糊神經網絡;交流解耦變結構;抖振;學習算法 劉偉(1956 -),男,遼寧錦州人,副教授,主要從事自動控制方面的教學、科研工作。 TP273 A 1009-0134(2011)4(上)-0083-04 10.3969/j.issn.1009-0134.2011.4(上).26 2010-11-12
4 仿真及實驗結果
5 結論
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20科教新報(2022年12期)2022-05-23 06:34:16今日農業(2021年14期)2021-10-14 08:35:28哲學評論(2021年2期)2021-08-22 01:53:34軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58海峽姐妹(2020年8期)2020-08-25 09:30:18中華詩詞(2019年7期)2019-11-25 01:43:04家庭影院技術(2017年9期)2017-09-26 03:41:45影視與戲劇評論(2016年0期)2016-11-23 05:26:01
