基于螺旋理論的鍛造操作機構型綜合
2011-05-30 09:46:10許允斗姚建濤趙永生
中國機械工程 2011年13期
許允斗 姚建濤 趙永生
燕山大學,秦皇島,066004
0 引言
鍛造操作機是與大型自由鍛造壓機協調作業的大鍛件制造的重要裝備。鍛造操作機的使用可以顯著提高制造能力、制造精度、生產效率和材料利用率,降低能耗。然而國內大型鍛造操作機的發展一直比較緩慢。
鍛造操作機是復雜的空間多桿機構,其構型綜合需要豐富的實際工程經驗以及堅實的機構學理論基礎。文獻[1-2]采用基于GF集的構型方法提出了一系列鍛造操作機新構型,本文采用基于螺旋理論的約束綜合法[3-6]構造了一系列串并聯形式的混聯結構鍛造操作機構型。
1 基于螺旋理論的約束綜合法基礎
根據螺旋理論[7]可知,空間任何一條直線可以用1個旋量來表示,形式如下:

式中,S為螺旋軸線的方向矢量;S0為直線的線矩;r為從參考系坐標原點到軸線上任意一點的矢徑;h為螺旋的節距。
同樣,1個螺旋也可以用含有6個標量的Plücker坐標表示,即

其中前3個分量表示螺旋的軸線方向,后3個分量為前3個分量的對偶部分。
式(1)中,當h=0時,螺旋的形式化簡為

此時該螺旋為線矢量,可表示1個轉動副的運動螺旋,S表示轉動副的軸線方向。
當h→∞時,螺旋的形式化簡為

此時該螺旋為偶矢量,可表示1個移動副的運動螺旋,0表示1個1×3的零矢量,S為移動方向。
其他的多自由度運動副可以用轉動副和移動副的組合構成。如圓柱副可以看成由1個轉動副和1個同軸的移動副組成,球副可以看成由3個軸線相交但不共面的轉動副組成。
若兩個螺旋$和$r的互易積等于零,那么這兩個螺旋互為反螺旋。即

式中,?表示互易積運算符號。
根據反螺旋理論可知,當 $1,$2,…,$n表示并聯機構某一支鏈的運動螺旋系時,其反螺旋 $r就表示該支鏈運動螺旋系施加給動平臺的結構約束螺旋,即支鏈機械結構對動平臺的約束力和力偶。機構末端約束螺旋系為所有支鏈結構約束螺旋組成的螺旋系。機構末端約束螺旋系決定機構的自由度,其最大線性無關數就等于機構被約束的自由度數。而所有支鏈都有的相同約束反螺旋即為公共約束。
根據文獻[3]可知并聯機構構型綜合過程為:首先根據機構要求的末端運動螺旋系求出其末端約束螺旋系,然后構造支鏈約束螺旋系,求出支鏈運動螺旋系構造支鏈機械結構,最后配置這些支鏈機械結構形成符合要求的并聯機構。
2 鍛造操作機的構型
鍛造操作機是一種移動重載機器人,其移動通過大車實現,操作機的夾鉗可以繞鉗桿軸線做大范圍轉動,同時還可作升降、俯仰、側擺和側移運動。夾鉗繞鉗桿軸線大范圍的轉動一般采用串接上一個轉動副實現,其他的四個動作由操作機的提升機構來完成。為了安全,重載運動設備一般需配備緩沖機構,在操作機中需要升降方向、大車前進方向和側移方向的緩沖。其中升降方向的緩沖由實現升降運動的主動機構完成,不用另外添加緩沖機構。通常情況下,大車前進方向和側移方向的緩沖運動采用平行4R機構(R代表轉動副)實現,因為該機構不會出現卡死現象。因此提升機構需要增加大車前進方向的移動和側向冗余移動,即提升機構的運動包括升降、俯仰、側擺、側移、大車前進方向的移動以及側向冗余移動。由上述可以看出,操作機的構型綜合其實可轉化為操作機提升機構的構型綜合。
串并聯形式的混聯機構與并聯機構相比,具有解耦性能高、控制容易等優點,所以本文構造了兩種類型的串并聯形式的混聯機構作為鍛造操作機提升機構構型。
2.1 鍛造操作機構型Ⅰ
首先建立參考坐標系oxyz,如圖1所示,其中z軸方向代表操作機升降方向,x軸方向代表操作機大車前進方向,y軸方向代表操作機側移方向,則俯仰就是繞平行于y軸的轉動,側擺就是繞平行于z軸的轉動。
本文用到的運動副符號的表示含義如圖2所示,圖中從左到右分別表示轉動副、移動副、圓柱副和球副。
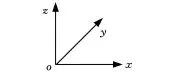
圖1 參考坐標系oxyz

圖2 運動副符號表示
為表達清晰,下面用符號表示運動副時,在其左上方標上了與運動副軸線平行的方向,如zP表示軸線與z軸平行的移動副,yC表示軸線與y軸平行的圓柱副。
操作機的升降運動采用zP或平行4R機構(圖3)實現,平行4R機構中轉動副軸線與y軸平行,用符號zPa表示。因為平行4R機構能降低升降驅動液壓缸的行程要求,而且不會像移動副那樣出現卡死現象,所以這里選擇平行4R機構實現操作機的升降運動。操作機的俯仰、側擺、側移、大車前進方向的移動以及側向冗余移動用由兩個分支組成的五自由度并聯機構實現。
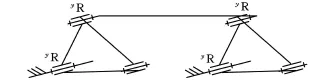
圖3 平行4R機構z Pa
下面采用基于螺旋理論的約束綜合法來對該二分支五自由度并聯機構進行構型。
如圖4所示,實現操作機俯仰、側擺、側移和大車前進方向的移動的運動螺旋在參考坐標系oxyz下可分別表示為

其中側向冗余移動的運動螺旋與側擺的運動螺旋是線性相關的,所以求上述運動螺旋組成的運動螺旋系的反螺旋,即可得該二分支五自由度并聯機構末端約束螺旋系:

其中,$r,1表示平行z軸方向的約束力,$r,2表示平行x軸方向的約束力偶,如圖5所示。
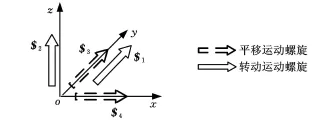
圖4 俯仰、側擺、側移及大車前進方向的移動的運動螺旋
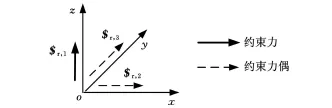
圖5 并聯機構末端約束螺旋
根據并聯機構末端約束螺旋系為所有支鏈結構約束螺旋組成的螺旋系,可得該五自由度并聯機構的兩支鏈結構約束螺旋,如表1所示。

表1 鍛造操作機構型 Ⅰ支鏈結構約束螺旋系
表1所列的第3種情況為過約束機構[8-9],因為兩支鏈都存在平行 x軸方向的約束力偶 $r,2。這種存在公共約束的機構在裝配時要保證兩支鏈含有的約束力偶 $r,2在方向上一致,安裝比較困難。而且當存在制造、安裝誤差和由重載引起的彈性變形時,會使關鍵部件的內部產生應力,降低其使用壽命。而表1所列的第1和第2種情況為無過約束機構,不存在上述問題。
綜上所述,構成該并聯機構的支鏈共有4種類型,分別為無約束支鏈、含約束力 $r,1支鏈、含約束力偶 $r,2支鏈和含約束力 $r,1及約束力偶$r,2支鏈。根據這些支鏈結構約束螺旋求與之互易的運動螺旋系,然后構造這些支鏈機械結構。限于篇幅,下面僅列舉這4種支鏈一些典型的結構:①無約束支鏈,如圖6a所示的yCzPS支鏈;②含約束力 $r,1支鏈,如圖6b所示的yCS支鏈;③含約束力偶 $r,2支鏈,如圖6c所示的yCzPyRzR支鏈;④含約束力 $r,1及約束力偶 $r,2支鏈,如圖6d所示的yCyRzR支鏈。
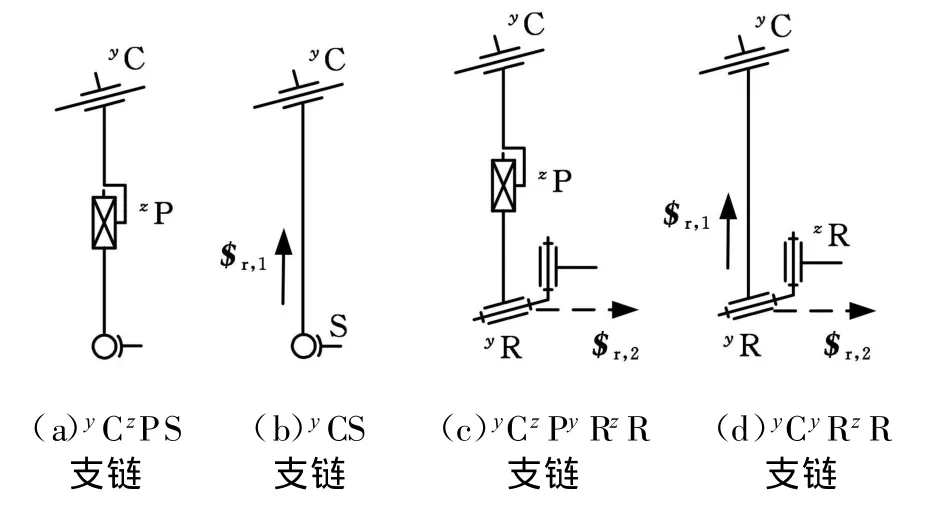
圖6 不含側向冗余移動的串聯運動支鏈構型
為了使操作機能實現側向冗余移動,需要在構成五自由度并聯機構的其中一個分支中添加1個轉動副軸線與x軸平行的平行4R機構,可用符號yPa表示。根據表1所列的支鏈結構約束螺旋系,選擇含約束力 $r,1yCS支鏈和含約束力 $r,1及約束力偶 $r,2yCyRzR支鏈添加1個yPa副較為合適。這樣yCS支鏈變為yCyPaS支鏈,如圖7a所示,yCyRzR支鏈變為yCyPayRzR支鏈,如圖7b所示。添加1個yPa副后,并不改變這些支鏈的約束螺旋系。
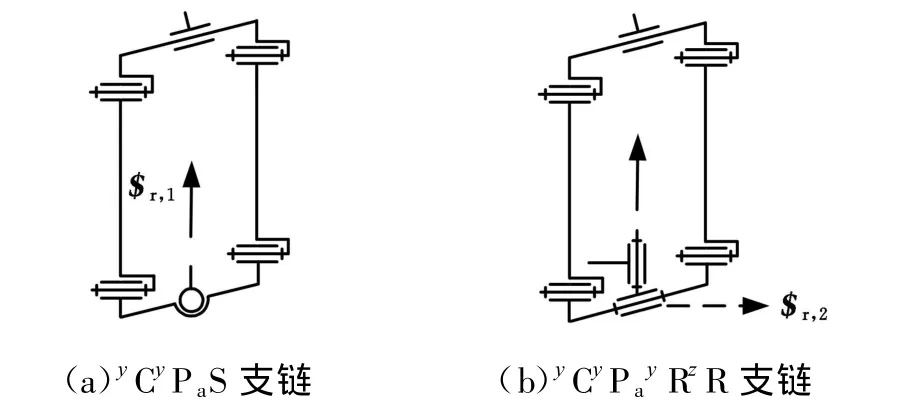
圖7 含側向冗余移動的串聯運動支鏈構型
除了選擇上述串聯式約束支鏈構成五自由度并聯機構外,也可以選擇含有廣義運動副(如平行4S機構)的約束支鏈構成并聯機構。假設圖8a所示的平行4S機構法線平行于x軸,則由文獻[10]分析可知,該平行4S機構受到1個平行z軸方向的約束力和1個平行x軸方向的約束力偶作用,所以它可等效于1個具有兩個轉動與兩個移動的四自由度串聯運動鏈yRyPayRzR,如圖8b所示。
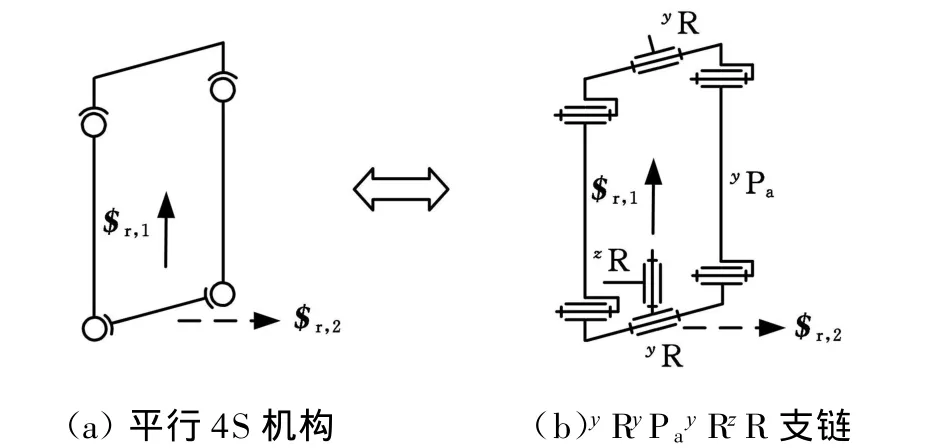
圖8 平行4S機構及其等效串聯運動鏈y R y Pa y R z R
因為圓柱副等效于軸線重合的1個轉動副和1個移動副,球副等效于軸線交于一點的3個轉動副,所以含約束力$r,1yCyPaS支鏈中的yRyPayRzR部分可用平行4S機構代替,代替后yCyPa S支鏈變為yP-4S-xR支鏈,如圖9a所示。含約束力 $1及約束力偶 $r,2yCyPayRzR支鏈中的yRyPayRzR也可用平行4S機構代替,代替后yCyPayRzR支鏈變為yP-4S支鏈,如圖9b所示。
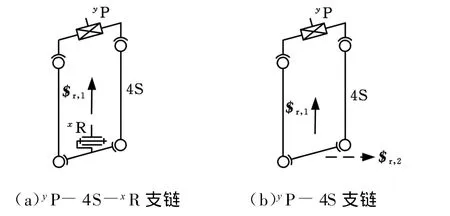
圖9 含平行4S機構和側向冗余移動的支鏈構型
根據表1可知:yCzPS支鏈和yCyPayRzR支鏈可構成無過約束五自由度并聯機構構型1,如圖10a所示;yCyPaS支鏈和yCzPyRzR支鏈可構成無過約束五自由度并聯機構構型2,如圖10b所示;yCzPyRzR支鏈和yCyPayRzR支鏈可構成過約束五自由度并聯機構構型3,如圖10c所示。
同樣,含平行4S機構的五自由度并聯機構構型也可由表1得到。無約束yCzPS支鏈和yP-4S支鏈可構成無過約束五自由度并聯機構構型4,如圖10d所示;yP-4S-xR支鏈和yCzPyRzR支鏈可構成無過約束五自由度并聯機構構型5,如圖10e所示;yCzPyRzR支鏈和yP-4S支鏈可構成過約束五自由度并聯機構構型6,如圖10f所示。
上述由兩個分支組成的五自由度并聯機構與實現操作機升降的平行4R機構zPa串聯可形成串并聯形式的混聯結構鍛造操作機構型 Ⅰ,如圖11所示。
考慮工程實際情況,一般選取移動副或與機架相連的運動副作為主動副比較方便。根據上述原則為這些鍛造操作機添加驅動,如圖11所示。其中大車前進方向的移動以及側向冗余移動用于實現鍛造操作機的緩沖,需要另外添加緩沖液壓缸實現,這里就不添加驅動。
轉動驅動q1實現操作機升降運動,移動驅動q2實現操作機俯仰運動,移動驅動q3和q4實現操作機側移和側擺運動。它們之間相互解耦,所以這些混聯結構鍛造操作機解耦性能高,易于控制。除了如圖11d所示的鍛造操作機構型4與文獻[11]提出的機構類似外,其余5種構型均為鍛造操作機新構型。與該類型其他5種構型相比,構型4不存在過約束,而且運動副數目少,結構簡單,為實際應用中應優先考慮的構型。
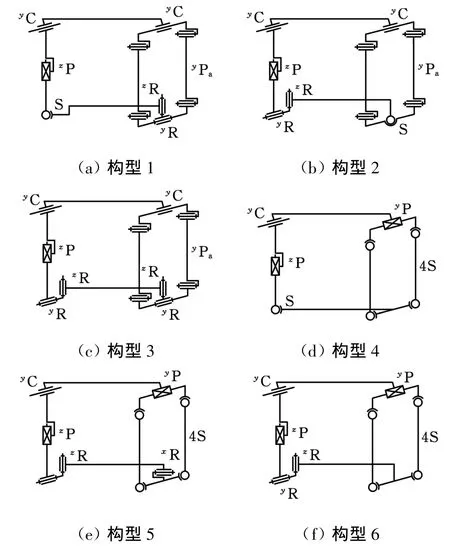
圖10 二分支五自由度并聯機構構型
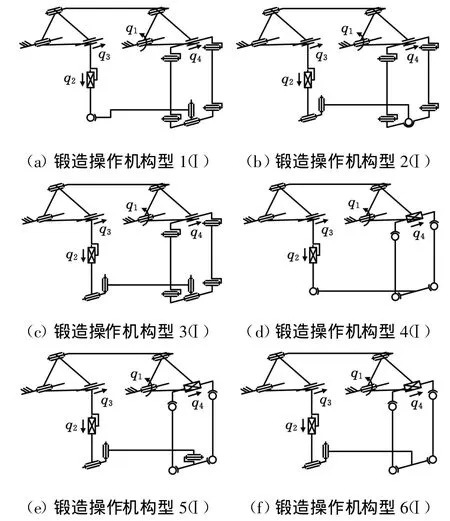
圖11 鍛造操作機構型 Ⅰ
2.2 鍛造操作機構型 Ⅱ
操作機的升降和俯仰運動分別用平行4R機構zPa和yR實現,則操作機的升降和俯仰運動可由yR和zPa組成的串聯運動鏈實現,如圖12所示。操作機的側擺、側移、大車前進方向的移動以及側向冗余移動用由兩個分支組成的四自由度并聯機構實現。同樣,下面采用基于螺旋理論的約束綜合法構型該二分支四自由度并聯機構。
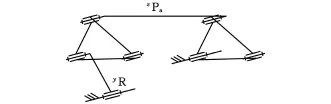
圖12 由y R和z Pa組成的串聯運動鏈
實現操作機側擺、側移和大車前進方向的移動的運動螺旋在參考坐標系oxyz下可分別表示為 $2、$3和 $4,如圖4所示。其中側向冗余移動的運動螺旋與側擺的運動螺旋是線性相關的,所以求由 $2、$3和 $4組成的運動螺旋系的反螺旋,即可得該四自由度并聯機構的末端約束螺旋系為$r,1、$r,2和 $r,3,其中 $r,3為

$r,3表示平行y軸方向的約束力偶,如圖5所示。
根據機構末端約束螺旋系為所有支鏈結構約束螺旋組成的螺旋系,可得該四自由度并聯機構的兩支鏈結構約束螺旋,如表2所示。
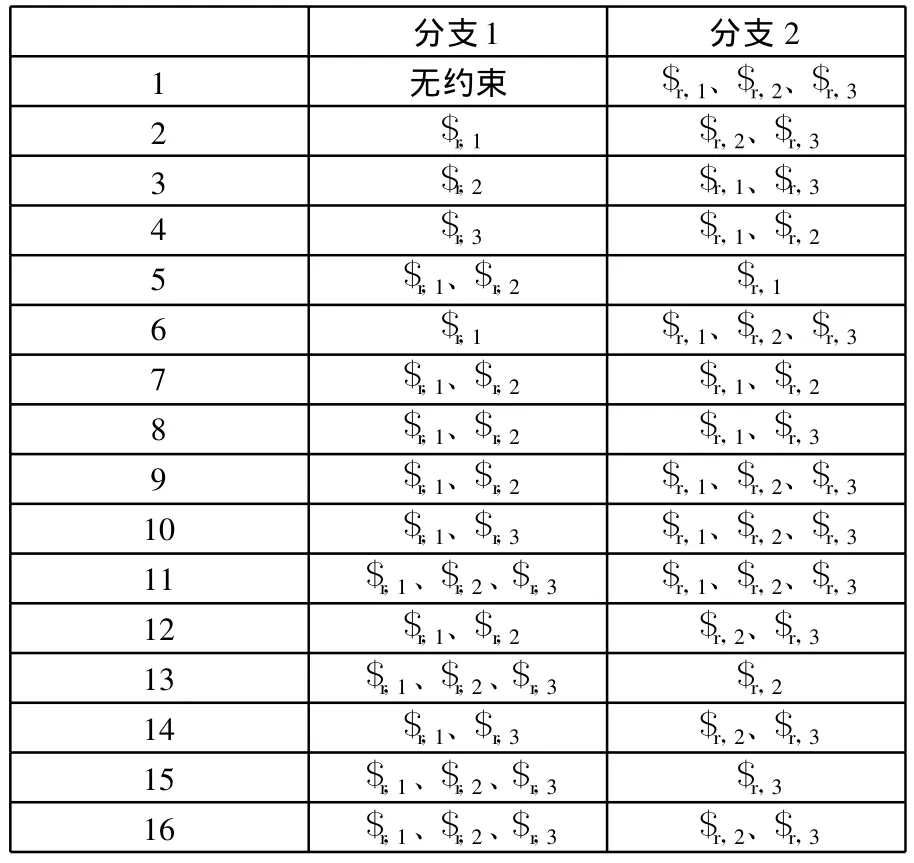
表2 鍛造操作機構型 Ⅱ支鏈結構約束螺旋系
為了保證兩支鏈約束螺旋系的組成為機構末端約束螺旋系,除了兩支鏈中相同約束力偶的方向必須一致之外,兩支鏈中的約束力 $r,1方向也必須一致且兩支鏈約束力 $r,1所組成的平面法線必須要與y軸平行。
表2所列的后11種情況為過約束機構,因為兩支鏈存在公共約束或冗余約束,前5種情況為無過約束機構。
因為操作機沿大車前進方向的緩沖運動需要用轉動副軸線與 y軸平行的平行4R機構(記為xPa)實現,所以構成該四自由度并聯機構的兩支鏈中都必須含有軸線與y軸平行的轉動副yR。由反螺旋理論分析可知,支鏈結構的約束力與支鏈機械結構中的轉動副軸線共面并與移動副軸線垂直,支鏈結構的約束力偶與支鏈機械結構中的轉動副軸線垂直[12]。反過來,如果支鏈中含有yR,則該支鏈不可能存在平行y軸方向的約束力偶$r,3。
所以表2所列的16種情況只有兩種滿足要求,即第5種情況和第7種情況。所以構成該四自由度并聯機構的支鏈只有兩種類型,即含約束力$r,1支鏈和含約束力 $r,1及約束力偶$r,2支鏈。
同樣,構成該四自由度并聯機構的其中一個分支必須含有側向冗余移動。含側向冗余移動的約束力 $r,1支鏈如yCyPa S支鏈和yP-4S-xR支鏈,分別如圖7a和圖9a所示。含側向冗余移動的約束力 $r,1及約束力偶 $r,2支鏈如yCyPayRzR支鏈和yP-4S支鏈,分別如圖7b和圖9b所示。不含側向冗余移動的約束力$r,1支鏈如yCS支鏈,如圖6b所示,不含側向冗余移動的約束力 $r,1及約束力偶 $r,2支鏈如yCyRzR支鏈,如圖6d所示。
根據表2可知:yCS支鏈和yCyPayRzR支鏈可構成無過約束四自由度并聯機構構型1,如圖13a所示;yCyRzR支鏈和yCyPaS支鏈可構成無過約束四自由度并聯機構構型2,如圖 13b所示;yCyRzR支鏈和yCyPayRzR支鏈可構成過約束四自由度并聯機構構型3,如圖13c所示;yCS支鏈和yP-4S支鏈可構成無過約束四自由度并聯機構構型4,如圖13d所示;yCyRzR支鏈和yP-4S-xR支鏈可構成無過約束四自由度并聯機構構型5,如圖13e所示;yCyRzR支鏈和yP-4S支鏈可構成過約束四自由度并聯機構構型6,如圖13f所示。
由yR和zPa組成的串聯運動鏈與上述四自由度并聯機構串聯可構成串并聯形式的混聯結構鍛造操作機構型 Ⅱ,如圖14所示。
同樣,為這些鍛造操作機添加驅動,其中大車前進方向和側移方向的緩沖運動也沒有添加驅動,如圖14所示。轉動驅動q1實現操作機升降運動,轉動驅動q2實現操作機俯仰運動,移動驅動q3和q4實現操作機側移和側擺運動。它們之間也相互解耦,所以這些混聯結構的鍛造操作控制相當容易。這些構型均為鍛造操作機新構型,與該類型其他5種構型相比,構型4不存在過約束,而且運動副數目少,結構簡單,為實際應用中應優先考慮的構型。
3 結論
(1)本文采用基于螺旋理論的約束綜合法,綜合了由兩個分支組成的五自由度并聯機構和四自由度并聯機構,得到了4種無過約束五自由度并聯機構和2種過約束五自由度并聯機構,以及4種無過約束四自由度并聯機構和2種過約束四自由度并聯機構。
(2)平行4R機構zPa與二分支五自由度并聯機構串聯,得到了6種串并聯形式的混聯結構鍛造操作機構型 Ⅰ,其中1種與現有的1種機構類似。由yR和平行4R機構zPa組成的串聯運動鏈與二分支四自由度并聯機構串聯,得到了6種串并聯形式的混聯結構鍛造操作機構型Ⅱ。
(3)這些混聯結構鍛造操作機的解耦性能強,控制容易,均為實際中可以考慮的構型。
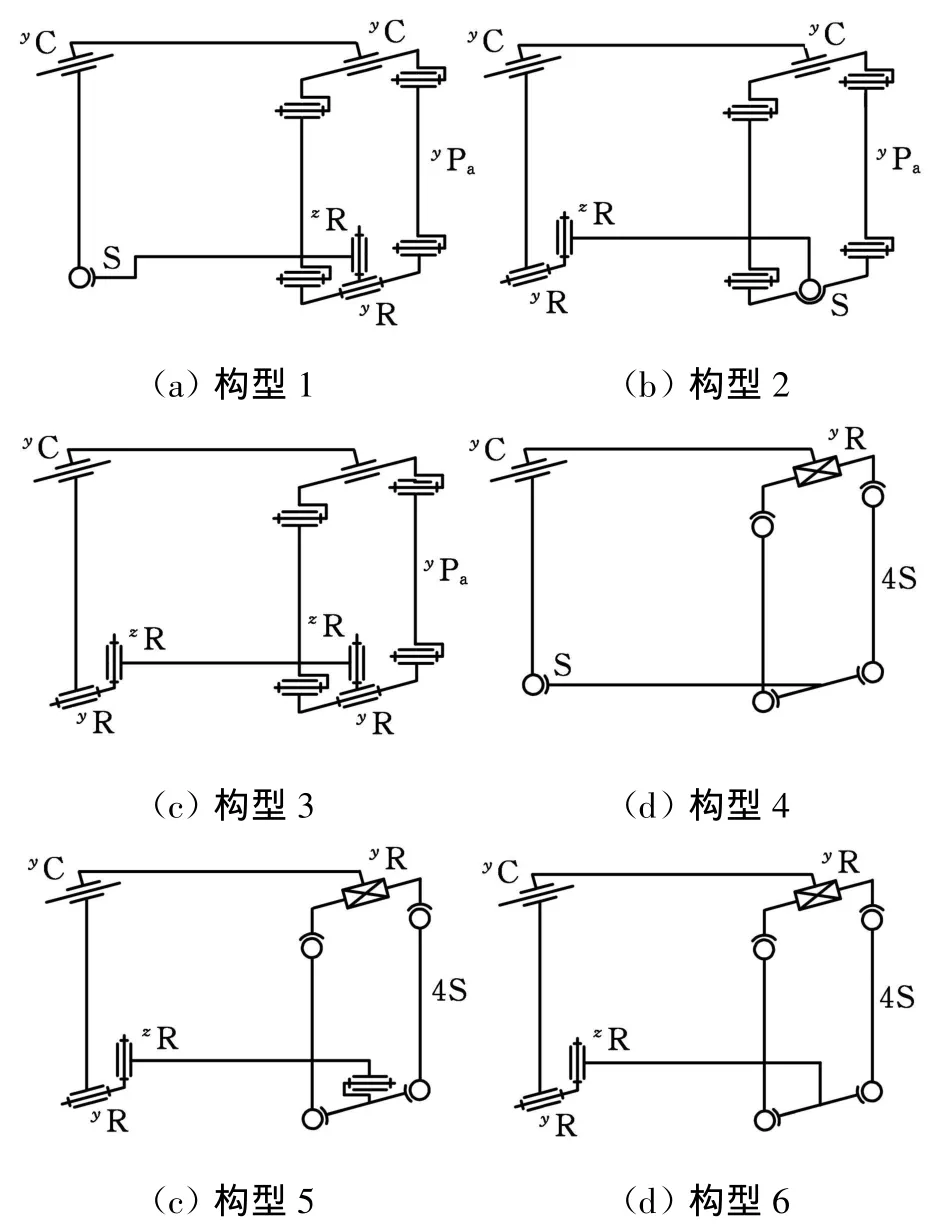
圖13 二分支四自由度并聯機構構型
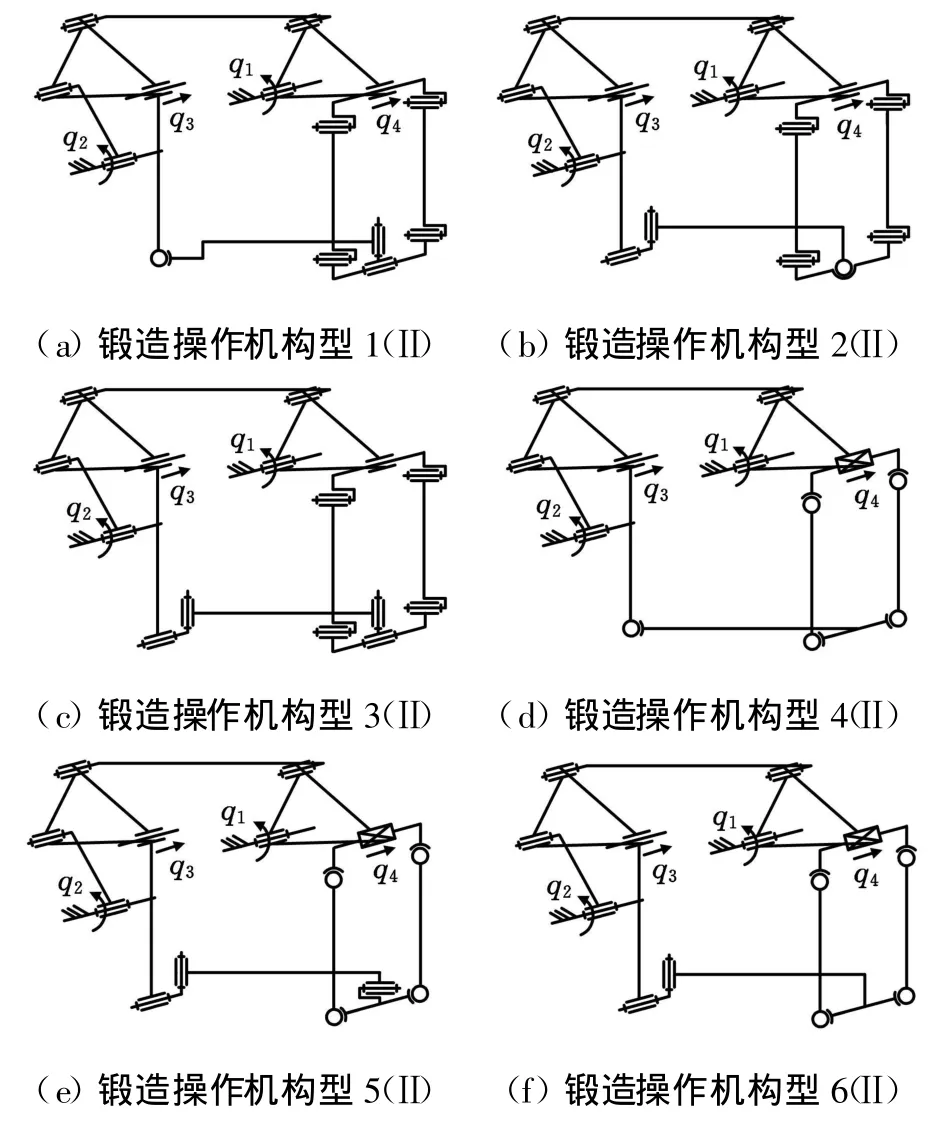
圖14 鍛造操作機構型Ⅱ
[1] 余發國,高峰,史巧碩.基于GF集的鍛造操作機構型方法[J].機械工程學報,2008,44(11):152-159.
[2] Yu Faguo,Gao Feng,Shi Qiaoshuo,et al.Structure Synthesis for Forging Manipulators[C]//Proceedings of the World Congress on Intelligent Control and Automation.Chongqing,China,2008:400-403.
[3] 黃真,李秦川.少自由度并聯機器人機構的型綜合原理[J].中國科學(E輯),2003,33(9):813-819.
[4] Huang Zhen,Li Qinchuan.Type Synthesis of Symmetrical Lower-mobility Parallel Mechanisms U-sing the Constraint-synthesis Method[J].International Journal of Robotics Research,2003,22(1):59-79.
[5] Victor Glazunov.Design of Decoupled Parallel Manipulators By Means of the Theory of Screws[J].Mechanism and Machine Theory,2010,45(2):239-250.
[6] Kong Xianwen,Gosselin C M.Type Synthesis of 4-DOF SP-equivalent Parallel Manipulators:a Virtual Chain Approach[J].Mechanism and Machine Theory,2006,41(11):1306-1319.
[7] Ball R S.A Treatise on the Theory of Screws[M].Cambridge,United Kingdom:Cambridge University Press,1900.
[8] Fang Yuefa,Tsai L W.Enumeration of a Class of Overconstrained Mechanisms[J].Mechanism and Machine Theory,2004,39:1175-1187.
[9] 郭盛,方躍法,房海蓉.非過約束五自由度并聯機構存在性問題的解析判定[J].中國機械工程,2007,18(22):2647-2651.
[10] 趙鐵石.空間少自由度并聯機器人機構分析與綜合的理論研究[D].秦皇島:燕山大學,2000.
[11] Dango&Dienenthal Maschbau.Schmiedemanipulator:Germany,DE20108277[P].2001-08-02.
[12] Kong Xianwen,Gosselin C M.Type Synthesis of Parallel Mechanisms[M].Berlin:Springer,2007.