基于在線模糊神經網絡建模的開關磁阻電機高性能轉矩控制*
2011-06-02 09:55:20姚雪蓮齊瑞云鄧智泉
電機與控制應用 2011年3期
關鍵詞:模型
姚雪蓮, 齊瑞云, 鄧智泉, 蔡 駿
(南京航空航天大學自動化學院,江蘇南京 210016)
0 引言
開關磁阻電機(Switched Reluctance Motor,SRM)具有結構簡單、效率高、工作可靠、低成本、調速性能優越等優點,在航空航天領域極具應用潛力。但由于電機本身的非線性電磁特性,導致轉矩脈動以及由其引起的電磁噪聲等問題,限制了其在低速、轉矩無脈動場合下的應用[1]。可以通過兩種方式來減小轉矩脈動:(1)優化電機設計;(2)引入先進的控制策略。前者通過合理設置定、轉子的極結構與參數來減小轉矩脈動,但是該方法對電機的其他性能會產生不利影響;后者通過優化電機的各種控制參數,如供電電壓、開通關斷角、電流幅值,實現轉矩脈動的最小化[2]。本文主要從控制的角度,研究如何通過引入先進建模與控制方法,減小SRM的轉矩脈動。
近年來,國內外有不少文獻研究了各種抑制轉矩脈動的控制方法,其中文獻[3]通過 BSpline神經網絡在線學習得到優化的相電流波形,對應不同的期望轉矩可以自動產生需要的相電流波形,但電流控制僅采用傳統的PI控制,對電機參數變化帶來的影響非常敏感,不能滿足系統魯棒性能的要求。文獻[4]使用B-Spline神經網絡同時在線估計轉矩和電感,但沒有將其應用于控制器設計中。文獻[5,7,10]將自適應網絡模糊推理系統(Adaptive Nerual Fuzzy in Ferencl System,ANFIS)用于SRM的轉矩和電感建模中,但都沒有將得到的模型用于SRM閉環控制中。文獻[6,8]利用從SRM動態模型仿真中產生的數據來對模糊神經網絡進行離線訓練,使之學習不同轉速和轉矩下的優化電流波形;將訓練好的RBF網絡用于電機的轉矩控制中,完成不同轉速下,轉矩、位置到電流的非線性映射;然后通過瞬時電流跟蹤控制使電機電流跟蹤參考電流。但該方法沒有考慮離線建模的局限性和電機實時運行時可能出現的參數變化、干擾等不確定情況。
本文采用一種間接瞬時轉矩控制方法,控制相繞組中的電流來跟蹤期望電流。首先應用ANFIS對SRM靜態轉矩逆模型和磁鏈模型進行離線學習,然后根據轉矩分配函數對各相轉矩進行分配,利用基于ANFIS的轉矩逆模型求出期望轉矩下的SRM期望的相電流。考慮到離線模型的局限性和實時運行時電機中存在的參數變化等不確定因素,通過在線監督學習的方法調整ANFIS轉矩逆模型和磁鏈模型的參數以提高模型的準確性。由于采用的是通過控制相電流跟蹤期望電流來實現相轉矩跟蹤期望轉矩的控制方式,則映射轉矩、角度和電流三者非線性關系的轉矩逆模型的準確性將直接決定控制效果的好壞。通過在線監督的學習算法提高了轉矩逆模型的準確性,從而優化了控制性能。基于在線調整的ANFIS磁鏈模型設計自適應滑模控制器調節SRM相繞組中的實際電流跟蹤期望相電流波形,從而實現其高性能轉矩控制。
1 SRM瞬時轉矩控制策略
常規的瞬時轉矩控制策略中,首先由轉速閉環調節器得到SRM的總期望轉矩,再由轉矩分配函數得到各相的期望轉矩Tref,經轉矩逆模型將各相期望轉矩映射為各相期望電流。最后,通過滯環電流控制器或者固定頻率的脈寬調制器調節實際相電流跟蹤期望的相電流[2,7,11-12]。但是由于SRM磁鏈的飽和非線性,只有通過非線性電流控制器才能滿足高性能轉矩控制的要求,滑模變結構控制以其滑動模態對系統攝動和外部擾動不變性的突出優點,使其在傳統電機調速系統中的應用日益普遍[9]。
SRM瞬時轉矩控制策略包括三級控制子任務[8,11]:首先,確定轉矩分配函數;其次,建立轉矩逆模型;最后,設計電流控制器。其中轉矩逆模型用于根據期望轉矩計算出相應的期望相電流,電流控制器用于調節實際相電流跟蹤期望相電流。可見轉矩逆模型和電流調節器在實現高性能轉矩控制中起著主要作用。常規的轉矩逆模型建模有兩種方法:一種是基于有限元仿真的查表;另一種是基于靜態轉矩特性的智能建模。這兩種方法都未考慮離線模型的局限性和實時運行時電機中存在的參數變化等不確定因素,同時電流控制器的設計也忽略了實際的SRM非線性特性。針對以上兩個主要控制子任務存在的問題,本文提出了如圖1所示的SRM控制系統結構圖。基于在線調整的ANFIS轉矩逆模型提高轉矩逆模型的建模準確性,以及基于在線調整的ANFIS磁鏈模型設計自適應滑模控制器,調節SRM相繞組中的實際電流更平穩地跟蹤期望相電流波形。
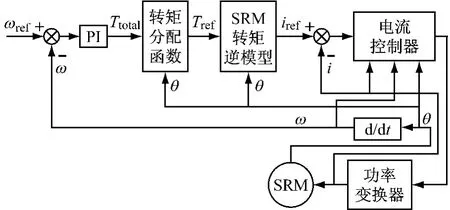
圖1 SRM瞬時轉矩控制系統原理圖
1.1 轉矩分配函數的確定
SRM的瞬時轉矩為各相產生的瞬時轉矩之和。由于換相時瞬時轉矩脈動比較嚴重,需要選擇合理的轉矩分配函數對各相產生的轉矩進行分配,使換相時的瞬時轉矩為恒定值,保證各相間轉矩平滑過渡。
對三相12/8極SRM,轉矩分配函數以45°為周期,滿足以下兩個條件:
(1)在一個通電周期內,第j相轉矩分配函數的數學表達式為
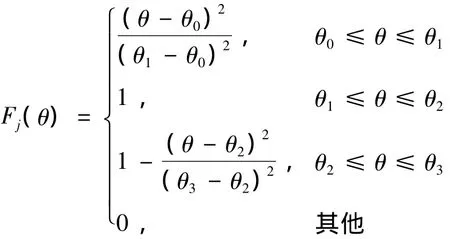
其中:當θ0≤θ≤θ1時,導通相期望轉矩按分段函數Fj(θ)逐漸增加,關斷相期望轉矩按分段函數Fj(θ)逐漸減小,電機總轉矩由兩相轉矩疊加而成,其值為Ttotal;當θ1≤θ≤θ2時,導通相繞組單獨導通,轉矩恒定為 Ttotal;當 θ2≤θ≤θ3時,情況與θ0≤θ≤θ1時類同。
(2)各相轉矩分配函數之和為1。
1.2 基于ANFIS的SRM轉矩逆模型及其在線學習
通過轉矩分配函數得到各相期望轉矩后,需要準確的轉矩逆模型用于產生相應的相電流控制指令。基于ANFIS建立由期望轉矩和角度到期望電流的轉矩逆模型。
ANFIS網絡的輸入為θ和Tref,輸出為相電流iref,其模糊推理規則的形式如下。
規則 j:如果 θ為Aj并且 Tref為 Bj,則

其中 Aj和 Bj(j=1,2,…,N)為模糊子集,N為模糊規則數。
根據模糊推理的最大輸出以及加權平均解模糊化方法得到ANFIS網絡的總輸出:

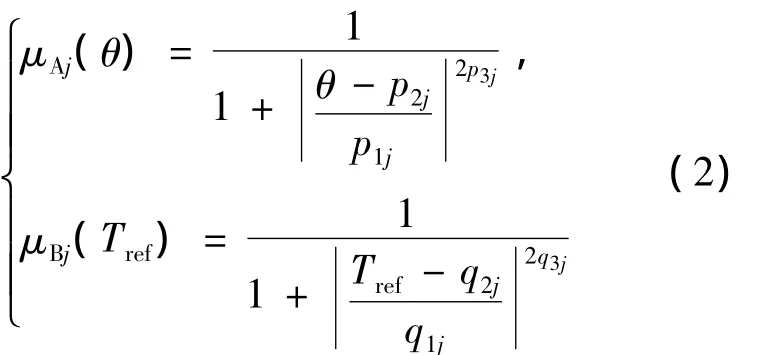
式中:pij和 qij分別為 μAj和 μBj的參數。
在離線訓練中,初始規則設為49條,初始隸屬函數均勻覆蓋輸入變量的整個論域。訓練步長選為 0.01,步長遞減速率為 0.9,遞增速率為 1.1。圖2為離線訓練得到的不同期望轉矩下模糊神經網絡逆模型所對應的相電流波形。

圖2 SRM模糊神經網絡學習曲線
根據SRM靜態轉矩特性,利用模糊神經網絡可以離線建立轉矩逆模型。但SRM靜態轉矩特性與電機在實際運行中的動態轉矩特性存在著一定差異,同時系統的結構和參數在運行中經常是變化的。由于轉矩逆模型的建模精度直接決定了SRM轉矩控制效果,為提高控制性能,需要對離線訓練的轉矩逆模型進行在線調整。ANFIS的總輸出可寫為如下模糊基函數與可調參數的線性組合形式:
其中 aj=[a,a,a]T為模糊神經網絡的可調整參數,ψj(θ,Tref)=·[θ,Tref,1]T。可調整參數aj的初始值可以設為離線訓練得到的參數值或設為零,通過轉矩分配函數得到的期望轉矩與實際觀測轉矩之間的誤差來在線不斷調整:

式中:η——學習率,η >0;
Tm——實際轉矩。
SRM在線建模的原理圖如圖3所示。

圖3 基于在線修正的模糊神經網絡訓練SRM轉矩逆模型
1.3 控制策略
通過轉矩逆函數得到期望的相電流后,最后一個任務是設計電流控制器,控制實際相電流跟蹤期望相電流。
本文將滑模控制應用于SRM的轉矩控制中,以相電流i為狀態變量,并定義滑模切換面為s=i- iref。
SRM相繞組的狀態方程為

式中:i——相電流,狀態變量;
L(θ,i)——電感;
U——繞組端電壓,輸入控制量;
ω——電機實際轉速;
R——相繞組。
通常變結構控制采用常值切換控制,其中的k往往取值過大會引起抖振問題,為減小k以減少系統抖振和能量損耗問題,本文將等效控制和常值切換控制相結合得到滑模控制律:

k sgn(s)——開關控制量,補償等效控制的誤差;
為了得到電感和反電勢的估計值,本文首先通過ANFIS建模方法建立磁鏈的估計模型(θ,i),然后再根據電感和反電勢、磁鏈之間的關系得到(θ,i)和。磁鏈的ANFIS建模過程與轉矩逆模型的建立過程類似,這里僅給出其最終表達式:

其中 bj=[b,b,b]T為模糊神經網絡的可調整參數,φj(θ,i)=j·[θ,i,1]T。
根據磁鏈和電感之間的關系得到電感的估計模型如下:

根據反電勢和電感的關系得到反電勢的估計模型如下:

同時,考慮到離線模型的局限性,通過磁鏈的參考值與估計值之間的誤差優化磁鏈的ANFIS模型,從而提高電感估計的精度。參數學習算法如下:

式中:λ——學習率,λ >0;
Ψref(k)——通過積分運算得到的磁鏈參考值。
圖4為基于模糊神經網絡的磁鏈、電感和反電勢在線估計示意圖。
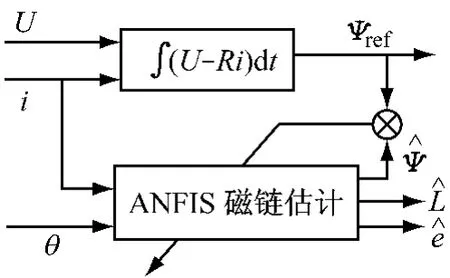
圖4 模糊神經網絡的磁鏈、電感和反電勢估計模型
2 轉矩控制仿真結果
本文所采用的訓練樣機是一臺12/8的SRM,其驅動系統的參數如下:Ns=12,Nr=8,J=1.321 3e -4 kg·m2,UDC=270 V,R=0.5 Ω,θon= -1°,θoff=18°。為方便仿真研究,給定總的期望轉矩Ttotal=0.4 N·m。轉矩逆模型和磁鏈模型的在線參數學習率分別為η=0.01和λ=0.000 1。滑模控制律中的開關增益 k=100,PWM控制中的載波頻率和幅值分別為25 kHz和500 V。
磁鏈在線建模的仿真結果如圖5所示,最初估計的磁鏈與參考磁鏈之間的誤差較大,但是通過該誤差不斷在線調節ANFIS模型的參數,從而提高了磁鏈模型的準確度,從圖上可以看出最終估計的磁鏈與參考磁鏈之間的誤差逐漸減小,具有較好的吻合性。基于靜態轉矩特性的轉矩逆模型輸出電流與實測電流比較如圖6所示。

圖5 磁鏈在線建模

圖6 基于靜態轉矩特性的轉矩逆模型輸出電流與實測電流比較
為了體現本文所提控制方法的優越性,通過三種情況的仿真結果進行對比驗證:(1)常規的電流滯環控制(見圖7);(2)基于離線ANFIS建模的轉矩控制(見圖8);(3)基于在線ANFIS建模的轉矩控制(見圖9)。
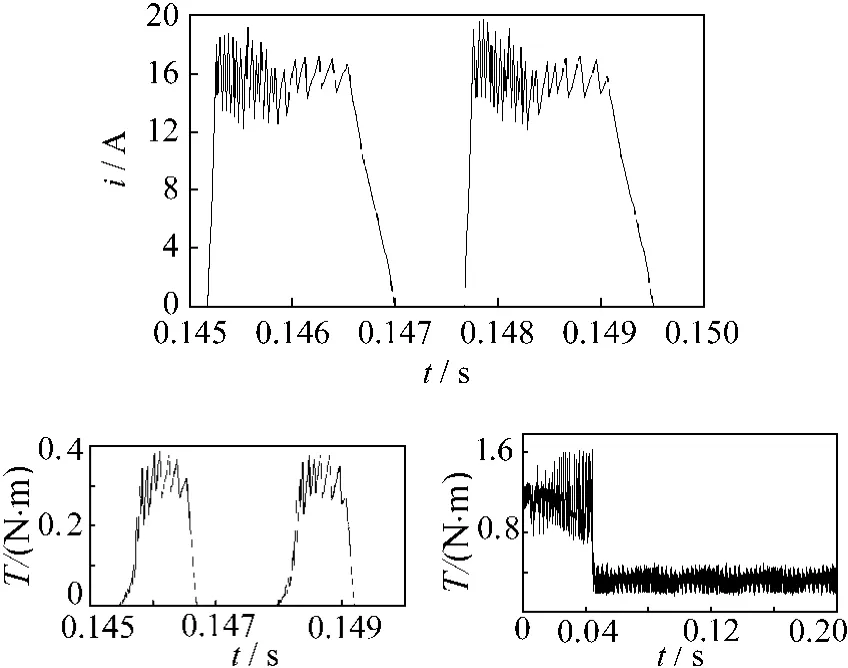
圖7 滯環控制仿真結果
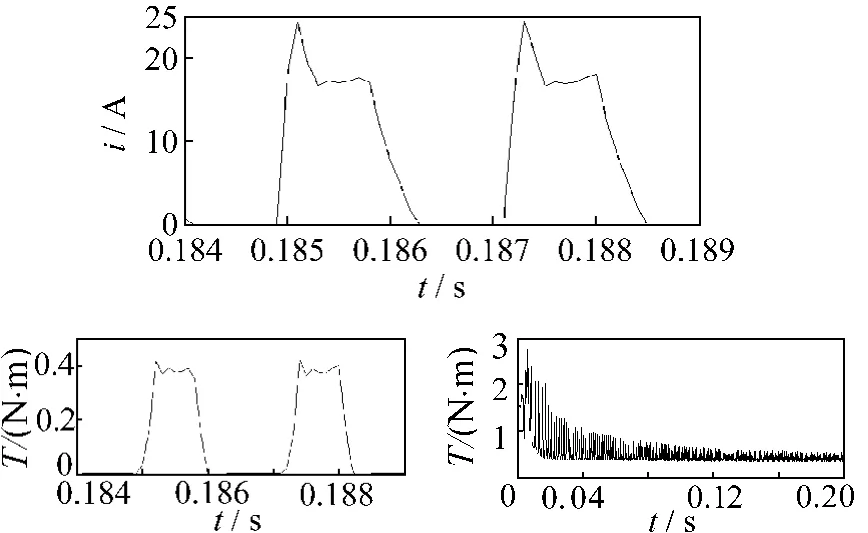
圖8 基于模糊神經網絡離線建模的轉矩控制仿真結果

圖9 基于模糊神經網絡在線建模的轉矩控制仿真結果
從仿真結果可以看出,無論是基于離線AN-FIS建模的轉矩控制,還是基于在線ANFIS建模的轉矩控制,減小轉矩脈動的效果較滯環控制的效果好。這是因為模糊神經網絡具有很好的非線性映射能力,并且滑模變結構控制對系統攝動和外部擾動具有不變性。
ANFIS是具有極強非線性映射能力的局部神經網絡,多用于已經獲得大量用于建模或者希望模型能夠跟隨大量輸入輸出數據對的情況下[10],經過學習訓練后的ANFIS提取了訓練數據的局部特征,訓練樣本的獲取是ANFIS訓練的一個很重要的環節,其要求選取的訓練樣本蘊含的信息準確且具有代表性,從SRM的靜態轉矩特性曲線可以看出,在定轉子對齊位置相轉矩均為零,而電流的值不唯一,換而言之,在SRM定轉子對齊位置無法得到用于離線訓練ANFIS轉矩逆模型,代表電機特性的i(T,θ)的輸入輸出數據對,則在該位置的對非線性模型的逼近程度不夠高。從圖6可以看出基于靜態轉矩特性離線訓練得到的ANFIS轉矩逆模型用于SRM仿真系統時輸出的電流與實測波形相比,在該位置就會出現較大的誤差,將此逆模型用于電機的實時控制中,所得的控制效果如圖8所示,在相電流精確值不確定的點所控制的相轉矩也存在一定的波動。
考慮到上述根據靜態轉矩特性建立轉矩逆模型的局限性,本文通過相轉矩與實際轉矩之間的誤差不斷在線調整轉矩逆模型的參數,以提高逆模型的精度。同時針對實時運行時電機中存在的參數變化等不確定因素,在線調整的ANFIS磁鏈模型并設計自適應滑模控制器。對比圖9和圖8可以看出:引入在線調整策略得到的總轉矩比未引入時的總轉矩平滑,達到了進一步減小轉矩脈動的效果。
3 結語
本文基于具有在線修正功能的自適應模糊神經網絡離線建立SRM的轉矩逆模型,根據轉矩分配函數得到優化后的期望轉矩對應的期望相電流。基于在線調整的ANFIS磁鏈模型設計自適應滑模電流控制器,控制相繞組中的電流跟蹤期望相電流,使得每一相輸出的瞬時轉矩接近期望轉矩,從而達到減小轉矩脈動的目的。
[1]王宏華.開關型磁阻電動機調速控制技術[M].北京:機械工業出版社,1995.
[2]Husain I.Minimization of torque ripple in SRM drives[J].IEEE Trans Industrial Electronics,2002,49(2):28-39.
[3]Lin Z,Reay D S,William B W,et al.Torque ripple reduction in switched reluctance motor drives using B-spline neural networks[J].IEEE Trans Industrial Applications,2006,42(6):1445-1453.
[4]Lin Z,Reay D S,William B W,et al.Online modeling for switched reluctance motors using B-spline neural networks[J].IEEE Trans Industrial Electronics,2007,54(6):3317-3322.
[5]Liang D,Ding W.Modelling and predicting of a switched reluctance motor drive using radial basis function network-based adaptive fuzzy system[J].IET Electr Power Appl,2009,3(3):218-230.
[6]夏長亮,陳自然,李斌.基于RBF神經網絡的開關磁阻電機瞬時轉矩控制[J].中國電機工程學報,2006,26(19):127-132.
[7]梁得亮,丁文,魚振民.基于自適應網絡模糊推理系統的開關磁阻電機建模方法[J].中國電機工程學報,2008,28(9):86-92.
[8]鄭洪濤,蔣靜坪.開關磁阻電機高性能轉矩控制策略研究[J].電工技術學報,2005(9):24-28.
[9]Shang W,Zhao S,Shen Y,et al.A sliding mode flux-linkage controller with Integral compensation for switched reluctance Motor[J].IEEE Trans Magn,2009,45(9):3322-3328.
[10]丁文,周會軍,魚振民.基于自適應模糊神經網絡的開關磁阻電動機建模與仿真[J].中小型電機,2005,32(5):18-22.
[11]張國宏,蔣靜坪,葛寶明.減小開關磁阻電動機低速時轉矩脈動的新型控制策略[J].中小型電機,1999,26(6):22-26.
[12]楊波,曹家勇,陳幼平,等.一種降低開關磁阻電機轉矩脈動的新方法[J].中小型電機,2001,28(4):12-16.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19