永磁同步電機(jī)控制系統(tǒng)控制器參數(shù)的優(yōu)化設(shè)計
2011-06-02 09:54:42姜重然陳文平徐斌山
電機(jī)與控制應(yīng)用 2011年6期
姜重然, 陳文平, 徐斌山
(佳木斯大學(xué)信息電子技術(shù)學(xué)院,黑龍江佳木斯 154007)
0 引言
永磁同步電機(jī)(Permanent Magnet Synchronous Motor,PMSM)是多變量、非線性、強(qiáng)耦合的系統(tǒng),常規(guī)PID控制器容易受電機(jī)參數(shù)變化和負(fù)載擾動等不確定因素的影響,對動態(tài)響應(yīng)和抗干擾能力難以兼顧,PMSM矢量控制系統(tǒng)能夠?qū)崿F(xiàn)高精度、高動態(tài)性能、大范圍的調(diào)速或定位控制,因此PMSM矢量控制系統(tǒng)引起了國內(nèi)外學(xué)者的廣泛關(guān)注。通常在速度控制器中要加入一個飽和函數(shù)對輸出信號進(jìn)行限幅,這樣,實際被控對象的輸入控制信號和控制器的期望輸出不等,導(dǎo)致系統(tǒng)的動態(tài)響應(yīng)變差,這種現(xiàn)象被稱為 Windup現(xiàn)象[1],但是通常情況下飽和是必不可少的,它可以使PMSM起動達(dá)到“時間最優(yōu)控制”。PMSM控制系統(tǒng)中的積分環(huán)節(jié)造成系統(tǒng)的Windup現(xiàn)象,導(dǎo)致系統(tǒng)輸出超調(diào)增大,穩(wěn)定時間增長,造成系統(tǒng)的動態(tài)特性變差,甚至?xí)鹣到y(tǒng)的不穩(wěn)定。
針對這一問題,需要設(shè)計抗飽和策略,既通常所說的Anti-Windup,使系統(tǒng)出現(xiàn)飽和時,盡快退出飽和區(qū)。目前大多數(shù)的Anti-Windup控制器屬于“二步法”設(shè)計[2],即首先不考慮系統(tǒng)的非線性特性,根據(jù)線性系統(tǒng)理論設(shè)計出滿足系統(tǒng)性能指標(biāo)的線性控制器;然后在該控制器的基礎(chǔ)上,加入補(bǔ)償環(huán)節(jié)。二步法充分利用線性系統(tǒng)控制理論和設(shè)計方法。但是,由于采用了分步設(shè)計原則,忽略了非線性環(huán)節(jié)加入線性控制器對系統(tǒng)閉環(huán)相應(yīng)的影響,改變了系統(tǒng)的閉環(huán)性能,難以達(dá)到預(yù)期的效果[3]。許多學(xué)者提出了新型的Anti-Windup控制器來改善系統(tǒng)性能[4-5],增加了抗飽和量給系統(tǒng)的負(fù)反饋輸入端,使控制效果更加理想。如果對傳統(tǒng)的Anti-Windup控制器的參數(shù)進(jìn)行尋優(yōu),得到最優(yōu)的控制器參數(shù),既提高了系統(tǒng)性能,又減小了計算量。常見的尋優(yōu)方法有最速下降法、共軛梯度法、牛頓法和單純形法,其中單純形法非常適合于非線性控制系統(tǒng)的參數(shù)優(yōu)化問題,采用單純形法的調(diào)節(jié)參數(shù)自尋優(yōu)方法具有良好的收斂性。本文將單純形法應(yīng)用在Anti-Windup控制中,很好地優(yōu)化了抗飽和PI控制器的參數(shù),仿真和試驗結(jié)果表明了單純形法應(yīng)用在PMSM的Anti-Windup控制器參數(shù)優(yōu)化,可以很好地改善系統(tǒng)的動態(tài)性能。
1 PMSM矢量控制模型
將PMSM在a-b-c三相靜止坐標(biāo)系下的電壓方程進(jìn)行Clark變換,Park變換,得到d-q坐標(biāo)系下PMSM的定子電壓方程為

式中:ud、uq——定子電壓 d、q 軸分量;
ψd、ψq——磁鏈的 d、q 軸分量;
ωe——電角速度。
d-q坐標(biāo)系下磁鏈方程為
Ld、Lq——定子繞組 d、q 軸等效電感。
系統(tǒng)的機(jī)械運動方程為

式中:TL——負(fù)載轉(zhuǎn)矩;
B——摩擦系數(shù);
自抗擾控制器由韓京清教授提出,由三部分構(gòu)成:跟蹤微分器、擴(kuò)張狀態(tài)觀測器、非線性狀態(tài)誤差反饋控制律[7-10].自抗擾控制由于對系統(tǒng)模型的依賴程度不高,對系統(tǒng)的自身參數(shù)變化以及外部擾動等因素可以精確估計,同時算法易于工程實現(xiàn)[11-13].因此,在工業(yè)控制、機(jī)器人控制、航空航天等領(lǐng)域獲得了廣泛的應(yīng)用.對于單級倒立擺自抗擾控制器設(shè)計如下:
ω——電機(jī)轉(zhuǎn)子的機(jī)械角速度,滿足 ω=ωe/pn;
J——系統(tǒng)的轉(zhuǎn)動慣量。
對于面貼式PMSM,其電感滿足下列條件:Ld=Lq=L。電機(jī)的轉(zhuǎn)矩與d軸電流無關(guān),只與q軸電流成線性關(guān)系:

根據(jù)式(1)~式(4),得到面貼式PMSM的狀態(tài)方程為
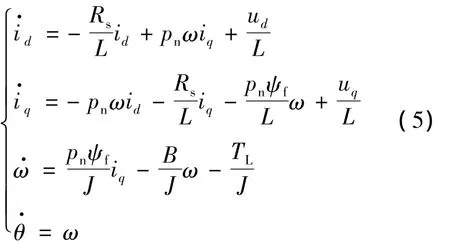
式中:θ——電機(jī)轉(zhuǎn)子的機(jī)械角位置,θ= θe/pn。
PMSM的矢量控制方法很多,其中id=0控制,實現(xiàn)了PMSM的解耦控制,最簡單也最常用。該系統(tǒng)采用雙閉環(huán)控制結(jié)構(gòu)實現(xiàn)id=0矢量控制方式。圖1為PMSM矢量控制系統(tǒng)框圖。
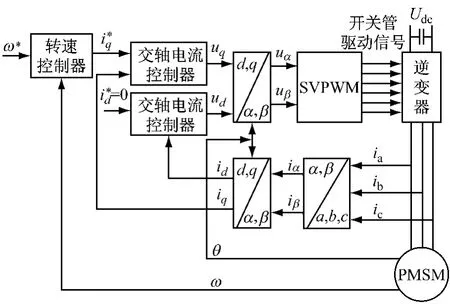
圖1 PMSM矢量控制系統(tǒng)框圖
2 電流環(huán)Anti-Windup PI控制器設(shè)計
由圖1可見,在該系統(tǒng)中需要設(shè)計三個控制器:速度控制器、d軸電流控制器、q軸電流控制器。由于PMSM的電流給定量需要限幅,所以速度控制器需要加入一個飽和函數(shù),而PI控制器的積分環(huán)節(jié)會造成Windup現(xiàn)象,執(zhí)行機(jī)構(gòu)的實際輸出與PI控制器的輸出不等,若將兩者的差值作為反饋信號就可以控制兩者的大小差異,抑制Windup現(xiàn)象。傳統(tǒng)的Anti-Windup PI控制器如圖2所示,PI控制器帶輸入限幅,把與的差反饋到積分環(huán)節(jié),控制器輸出表達(dá)式為[5]

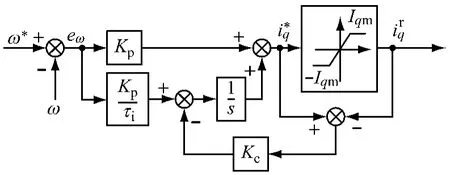
圖2 傳統(tǒng)的Anti-Windup PI控制器
由于電機(jī)的速度存在震蕩,相對于電流環(huán),速度環(huán)的參數(shù)對系統(tǒng)的性能影響大,對參數(shù)要求苛刻。因此,速度環(huán)的參數(shù)整定工作費時費力,由于各種因素的影響,整定效果仍然不夠理想。傳統(tǒng)的方法是采用“二步法”設(shè)計,即先設(shè)計PI參數(shù)KP、τI,再整定Kc的值,KP為比例項放大倍數(shù),τI為積分常數(shù),Kc為積分項放大倍數(shù)。這種將非線性環(huán)節(jié)引入到線性控制器中對系統(tǒng)的閉環(huán)控制沒有很好的預(yù)見性,達(dá)不到很好的控制效果。本文用單純形法優(yōu)化速度環(huán)的控制參數(shù) KP、τI、Kc的值。
3 單純形法
單純形法的基本思想[6]是:在n維空間中取n+1個點構(gòu)成初始單純形,比較n+1個點處目標(biāo)函數(shù)值的大小,丟棄最壞的點,代之以新的點,構(gòu)成新的單純形,反復(fù)迭代,使其頂點處的函數(shù)值逐步下降,頂點逐步逼近目標(biāo)函數(shù)的最小點。因為該系統(tǒng)有三個參數(shù)KP,τI,Kc需要選擇,所以可用三維空間上求目標(biāo)函數(shù)最小值來求得最優(yōu)解。若要求該函數(shù)的極值點,則可先計算四個點處的函數(shù)值,進(jìn)行比較,并根據(jù)它們的大小關(guān)系確定函數(shù)的變化趨勢作為搜索的參考方向,然后按參考方向搜索直到找到極值點為止。
4 仿真與試驗
PMSM 的參數(shù)如下:PN=1.5 kW,nN=1 000 r/min,IN=3.5 A,UN=380 V,pn=3,Rs=2.875 Ω,L=33 mH,J=0.011 kg· m2,B=0.002 N·m·s,ψf=0.8 Wb。交軸電流限幅值Iqm=6 A。
PI控制器采用傳統(tǒng)的Anti-reset Windup方法[7-8]整定參數(shù)。
PI控制器交軸電流環(huán)參數(shù)如下:kp2=2,τi2=0.005;直軸電流環(huán)參數(shù)如下:kp3=20,τi3=2。
PI控制器速度環(huán)參數(shù)如下:kp1=0.3,τi1=0.058 2;分別使 kc1=0.02 和kc1=0。如圖4、圖5所示,可看出加入抗飽和可以使控制器更快的退出飽和狀態(tài),并且較好地抑制速度的超調(diào)。
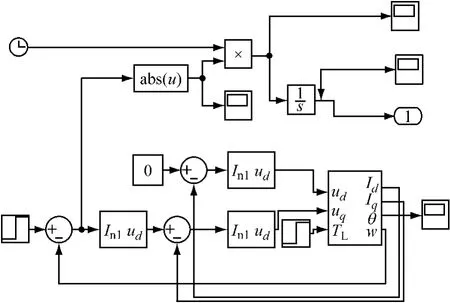
圖3 PMSM系統(tǒng)優(yōu)化模型
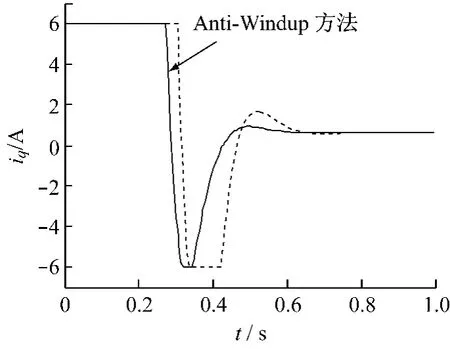
圖4 q軸電流變化
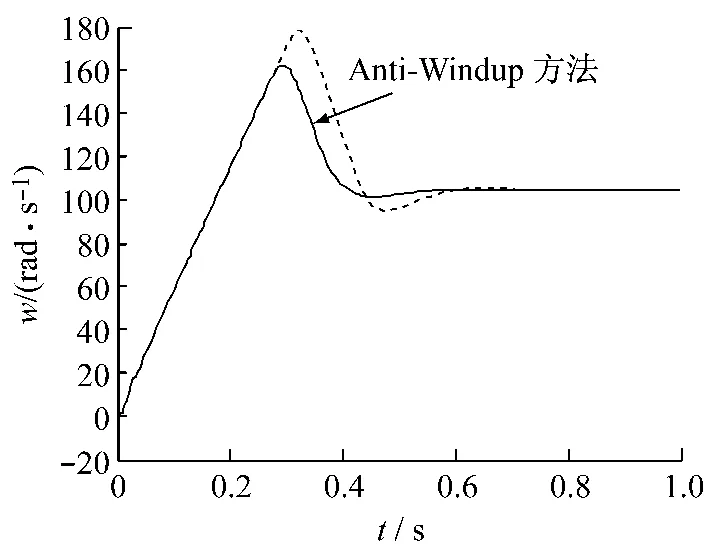
圖5 PMSM速度曲線
接下來對速度環(huán)的三個參數(shù)KP,τI,Kc用單純形法優(yōu)化,選取的初值如下:kp1=0.3,τi1=0.058 2;kc1=0.02。優(yōu)化后參數(shù)變?nèi)缦?kp1=1.703 9,τi1=0.021 4;kc1=65.097 7。目標(biāo)函數(shù)變化曲線如圖6所示,可看出優(yōu)化過程中目標(biāo)函數(shù)的值逐漸變小。由圖7可看出,優(yōu)化后電流退出飽和的時間減小了0.2 s。速度變化曲線如圖8所示,在0.18 s之前由于電流都處于飽和狀態(tài),速度曲線基本相同,在0.18 s之后,優(yōu)化后的系統(tǒng)退出飽和,可看出優(yōu)化后速度的超調(diào)量明顯減小,收斂更快,震蕩小。圖9、圖10分別為優(yōu)化前后PMSM在起動開始前一秒的三相電流變化曲線,可以看出優(yōu)化后,電流退出飽和的時間減小了近 0.2 s,控制效果更加理想[9]。
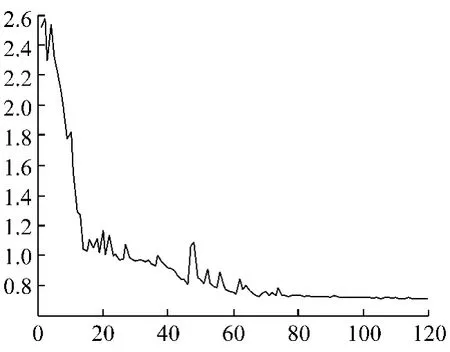
圖6 目標(biāo)函數(shù)變化
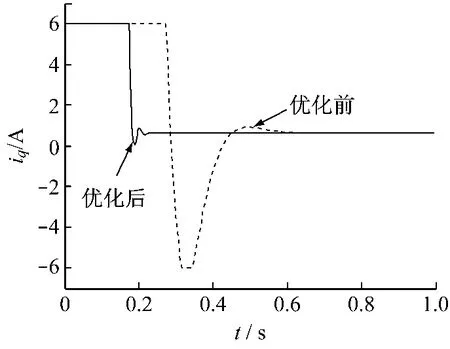
圖7 優(yōu)化前后q軸電流變化
為了驗證單純形法可以很好的優(yōu)化抗飽和PI控制器的參數(shù),選擇不同的初值,得到如圖11所示的速度變化的響應(yīng)曲線,雖然選取不同初值時最終優(yōu)化出來的參數(shù)不同,但控制效果都有較大改善。
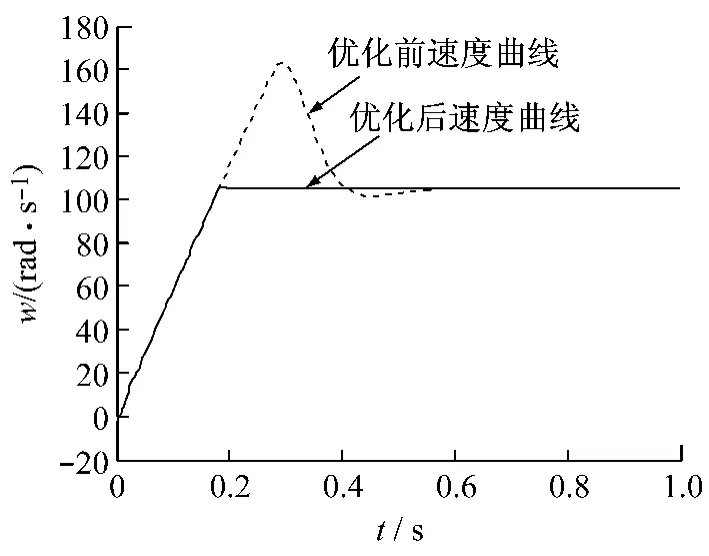
圖8 優(yōu)化前后PMSM速度曲線
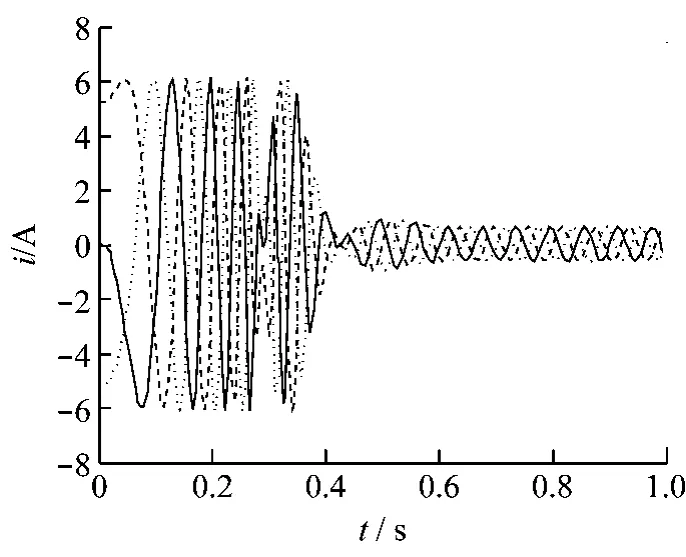
圖9 優(yōu)化前PMSM三相電流曲線
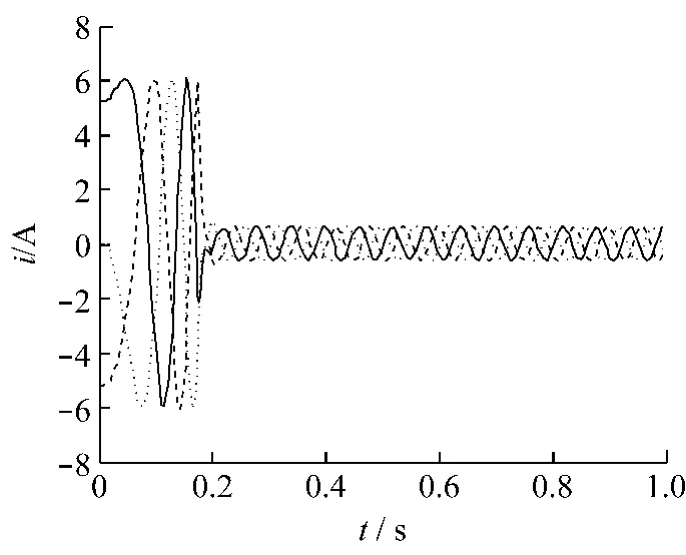
圖10 優(yōu)化后PMSM三相電流曲線
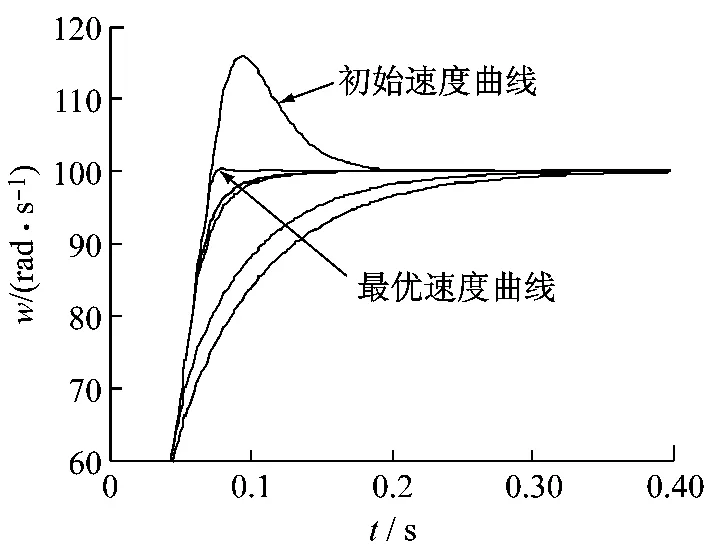
圖11 PMSM速度曲線
對優(yōu)化結(jié)果在實驗平臺上驗證,數(shù)字信號處理器(Digital Signal Processor,DSP)在線運行控制PMSM,用CCS內(nèi)部的示波器,測量PMSM實際運行的速度曲線。給定轉(zhuǎn)速n=600 r/min使用初始的Anti-Windup PI控制器參數(shù)控制PMSM系統(tǒng)得到實際的速度響應(yīng)曲線如圖12所示;經(jīng)過單純形法優(yōu)化得出的參數(shù)應(yīng)用在實際控制系統(tǒng)速度響應(yīng)曲線如圖13所示。由圖可看出經(jīng)過優(yōu)化的參數(shù)在控制PMSM時超調(diào)量變小、響應(yīng)快,得到的速度曲線更加理想[10]。
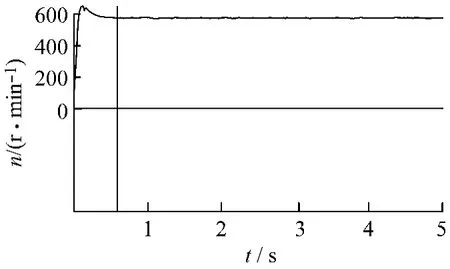
圖12 優(yōu)化前PMSM速度曲線
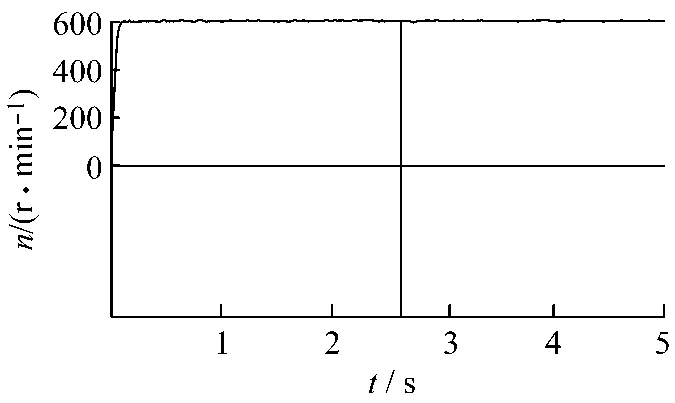
圖13 優(yōu)化后PMSM速度曲線
5 結(jié) 語
本文對PMSM的矢量控制系統(tǒng)進(jìn)行分析,使用MATLAB中的fminsearch函數(shù)(單純形法)優(yōu)化了速度環(huán)的抗飽和PI控制器的參數(shù)KP,τI,Kc的值,克服了傳統(tǒng)Anti-Windup控制器二步法參數(shù)整定的缺點,使控制系統(tǒng)的動態(tài)性能得到很大的提高。仿真和試驗的結(jié)果證實經(jīng)過優(yōu)化后的系統(tǒng)響應(yīng)速度快、超調(diào)量小,驗證了所介紹方法的有效性。
[1]Peng Y, Vrancic D, Hanus R. Anti-windup,bumpless,and conditioned transfer techniques for PID controllers[J].IEEE Control Systems Magazine,1996,16(4):48-57.
[2]Kothare M V,Campo P J,Morari M,et al.A unified framework for the study of Anti-Windup designs[J].Automatica,1994,30(2):1869-1883.
[3]Park J K,Choi C H.Dynamic compensation method for multivariable control systems with saturating actuators[J].IEEE Trans on Automation Control,1995,40(9):1635-1640.
[4]Bruckner M.Optimal model based Anti-Windup design[C]∥IEEE International Conference,2008(9):3-5.
[5]Grimm G,Teel A R,Zaccarian L.Robust linear anti-windup synthesis for recovery of unconstrained performance[J].International Journal of Control,2004:36.
[6]寇寶泉,程樹康.交流伺服系統(tǒng)及其控制[M].北京:機(jī)械工業(yè)出版社,2008.
[7]楊承志.參數(shù)尋優(yōu)智能PID控制[J].昆明理工大學(xué)學(xué)報,1998,23(5):95-99.
[8]David J,Kruglinski.Visual C + + 技術(shù)內(nèi)幕[M].北京:清華大學(xué)出版社,1999.
[9]Shin H B.New antiwindup PI controller for variablespeed motor drives[J].IEEE Trans on Industrial E-lectronics,1998,45(3):445-450.
[10]楊明,徐殿國,貴獻(xiàn)國.永磁交流速度伺服系統(tǒng)抗飽和設(shè)計研究[J].中國電機(jī)工程學(xué)報,2007,27(15):28-32.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34