基于重力異常的水下潛艇避障方法研究*
2011-06-07 00:41:16蔡華杰
艦船電子工程 2011年12期
蔡華杰
(中國艦船研究設計中心 武漢 430064)
一般來說,探測目標相對于周圍介質(空氣或海水)來說存在密度異常。重力學中的反演問題定義為:由實測重力異常Δg及其導數的數值大小、空間分布和變換規律,定性和定量推斷客觀存在的異常地質結構、構造和地質體的形狀、產狀及剩余密度分布。因此,基于重力梯度的目標探測技術,是將探測目標視為異常地質體,將基于重力梯度的目標探測問題轉換為重力梯度異常的反演問題。
由實測重力異常Δg及其導數的數值大小、空間分布和變換規律,定性和定量推斷客觀存在的異常地質結構、構造和地質體的形狀、產狀及剩余密度分布。可用公式表述如下:
任意形態物體所引起的重力異常Δg(x,y)表達式可寫為:
由此,反演問題可轉換為一個數學問題:由觀測面上重力異常Δg(x,y)及其導數的分布,在給定約束(如設物體密度均勻,形態規則)條件下,反演物體的密度參數和幾何參數。
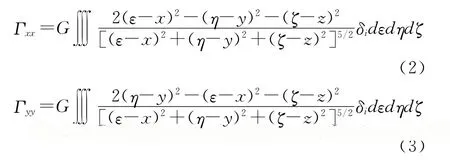
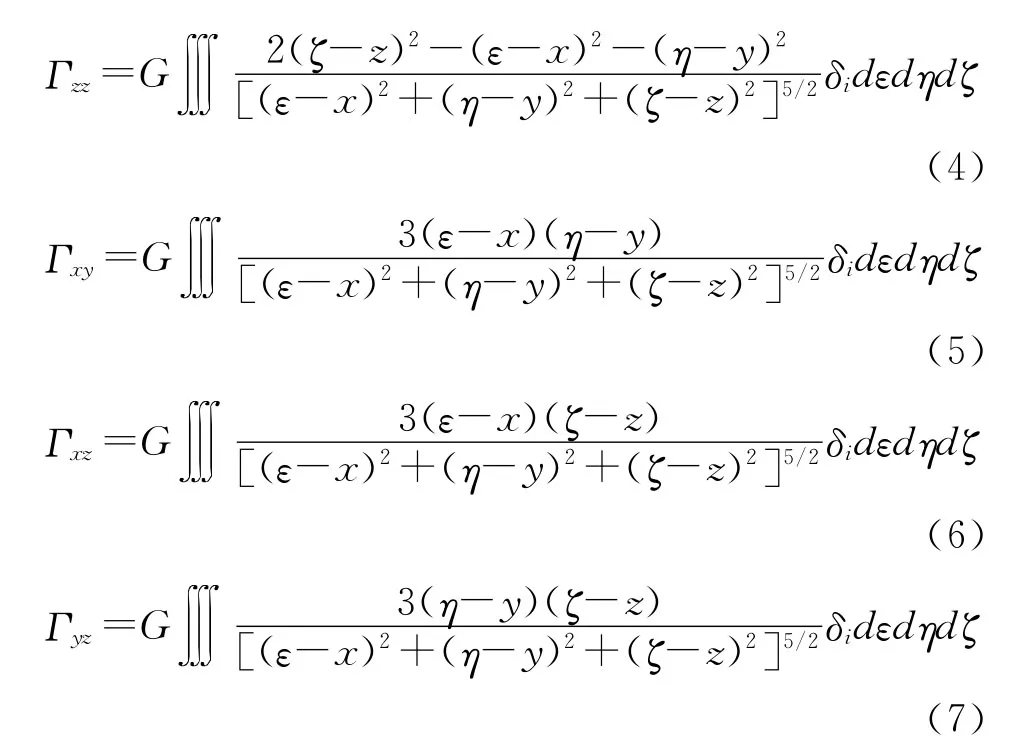
定義坐標系如下:把海平面當成水平面,置x軸和y軸于此平面內,使z軸的方向垂直向上。設x、y、z為重力梯度儀在三個坐標軸上的坐標,ε、η、ζ為第i個物質單元的坐標,δi表示第i個物質單元的密度。則由某個不明障礙物體所引起的重力梯度異常的計算公式如下:
1 引言
利用多種傳感器探測和感知戰場環境是艦船作戰系統的最重要組成部分之一。對海軍各型潛艇來說,及時探測并規避不明障礙物不僅可以有效確保其安全和隱蔽,更是其順利完成作戰任務的保障手段。據統計,20世紀以來,國外潛艇發生了近500起非戰時海損事故,導致84艘潛艇沉沒大海,其中核潛艇7艘。在這些事故中,碰撞沉沒事故占20%以上,這其中有上浮時與水面艦艇之間的相撞,水下潛艇之間的相撞,也有潛艇觸礁事件。此外,由于擱淺、觸底而造成破損或沉沒的事故也常有發生。2005年,美國海軍“舊金山”號核潛艇,在關島基地東南方猛撞了海圖中沒有標注的、深度為152.4m的海底山峰,艦體嚴重受損,險遭沉沒[1]。
以上潛艇事故的原因有三個方面:操作失誤、地貌不清、設備故障。由于現有的探測手段并不完善,而潛艇上所載的海圖,有些測量的年份已經久遠,由于海底火山活動、珊瑚生長、河口泥沙沉積,海底的淺點會有所變化,海圖也并不是完全可靠。因此,對于長期在水下航行的潛艇來說,需要一種實時、精確的探測避障技術,來對海底山峰、其他潛艇或艦船等不明障礙物進行規避,以保證潛艇在水下航行的安全[2]。
從20世紀70年代以來,新型的重力梯度儀和全張量重力梯度測量技術在國外開始得到重視和發展,在海洋勘探及目標探測領域開始得到應用,并表現出良好的前景,目前我國也在大力發展重力梯度技術[3~5]。由于萬有引力的作用,海底山峰等障礙物會產生重力異常,本文提出的基于重力異常的潛艇避障方法,根據艇載重力梯度儀探測的重力異常,可推算障礙物的大致信息,由此為潛艇的規避提供參考。這種探測障礙物的方式不向外輻射信號,保證了潛艇的隱蔽性,是一種值得關注和研究的新方法。
2 基于重力異常的避障基本原理
2.1 基于重力異常的障礙物探測
一般來說,探測目標相對于周圍介質(空氣或海水)來說存在密度異常。重力學中的反演問題定義為:由實測重力異常Δg及其導數的數值大小、空間分布和變換規律,定性和定量推斷客觀存在的異常地質結構、構造和地質體的形狀、產狀及剩余密度分布。因此,基于重力梯度的目標探測技術,是將探測目標視為異常地質體,將基于重力梯度的目標探測問題轉換為重力梯度異常的反演問題。
由實測重力異常Δg及其導數的數值大小、空間分布和變換規律,定性和定量推斷客觀存在的異常地質結構、構造和地質體的形狀、產狀及剩余密度分布。可用公式表述如下:
任意形態物體所引起的重力異常Δg(x,y)表達式可寫為:
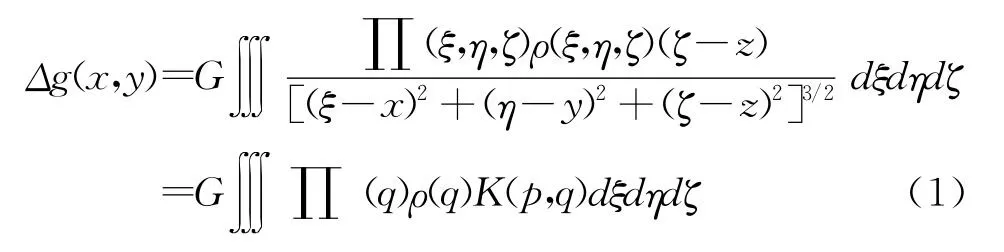
其中:∏(ξ,η,ζ)為物體的形態函數,由物體邊界確定,也可稱物體邊界位置函數,該函數在物體內值為1,在物體外值為0,呈階梯狀;ρ(ξ,η,ζ)為物體密度分布函數;它們共同確定了物體狀態。G為萬有引力常量。
由此,反演問題可轉換為一個數學問題:由觀測面上重力異常Δg(x,y)及其導數的分布,在給定約束(如設物體密度均勻,形態規則)條件下,反演物體的密度參數和幾何參數。
2.2 重力異常反演
定義坐標系如下:把海平面當成水平面,置x軸和y軸于此平面內,使z軸的方向垂直向上。設x、y、z為重力梯度儀在三個坐標軸上的坐標,ε、η、ζ為第i個物質單元的坐標,δi表示第i個物質單元的密度。則由某個不明障礙物體所引起的重力梯度異常的計算公式如下:
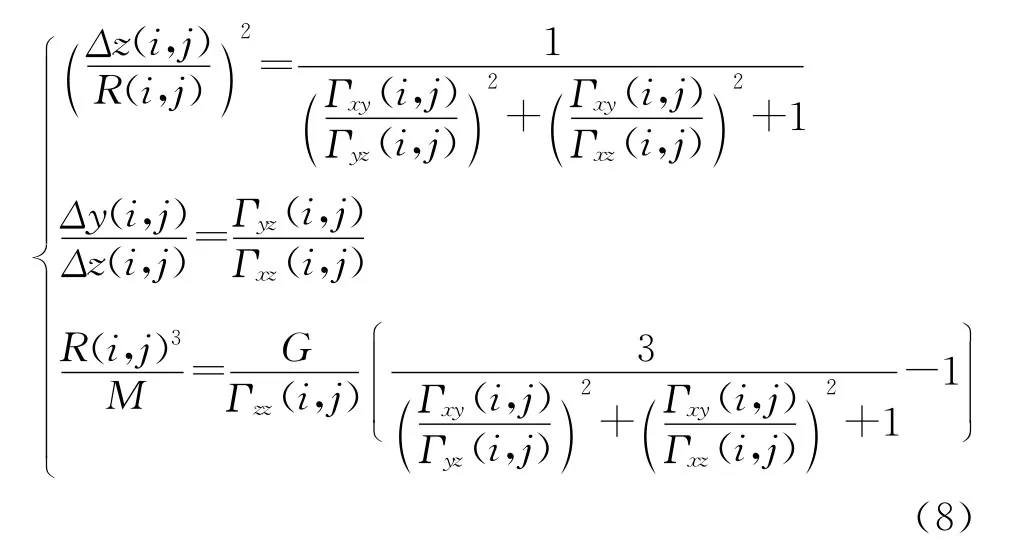
如果目標物體的距離遠大于目標本身大小,則以上公式經過近似和推導可得:
由式中前兩項可以推測目標物體的方位角,在預估物體質量的基礎上,可根據第三項推測目標物體的距離。
3 仿真實驗
潛艇在水下航行時,通過艇載全張量重力梯度儀連續測量各個方向上的重力信息,由于萬有引力的存在,當具有一定質量的目標靠近時,重力梯度儀會測量到和目標質量、相對位置有關的重力異常變化。我們將障礙物假設成一個質點,考慮如圖1所示的兩種情況:(a)潛艇航跡直接指向障礙物;(b)潛艇航跡經過障礙物附近但不與障礙物接觸。潛艇沿著航跡前進時,艇載重力梯度儀實時探測障礙物所引起的重力梯度異常,這兩種航跡上的重力梯度異常如圖2所示。
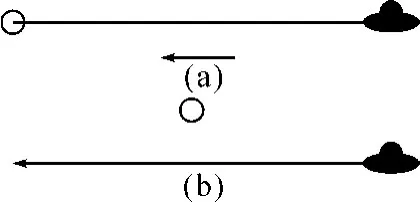
圖1 潛艇航跡與障礙物的空間位置關系
根據重力梯度的變化曲線,我們可以大致推測障礙物與潛艇航跡之間的相對位置關系。
假定障礙物處于靜止狀態,潛艇在航行中連續測量重力梯度異常,代入式(8),則可以實時計算障礙物的方位,經過多次測量和障礙物質量估計,就可以進一步確定障礙物的位置。如圖3所示,“潛艇航跡”、“障礙物位置”及“反演障礙物方位”分別表示在圖中。
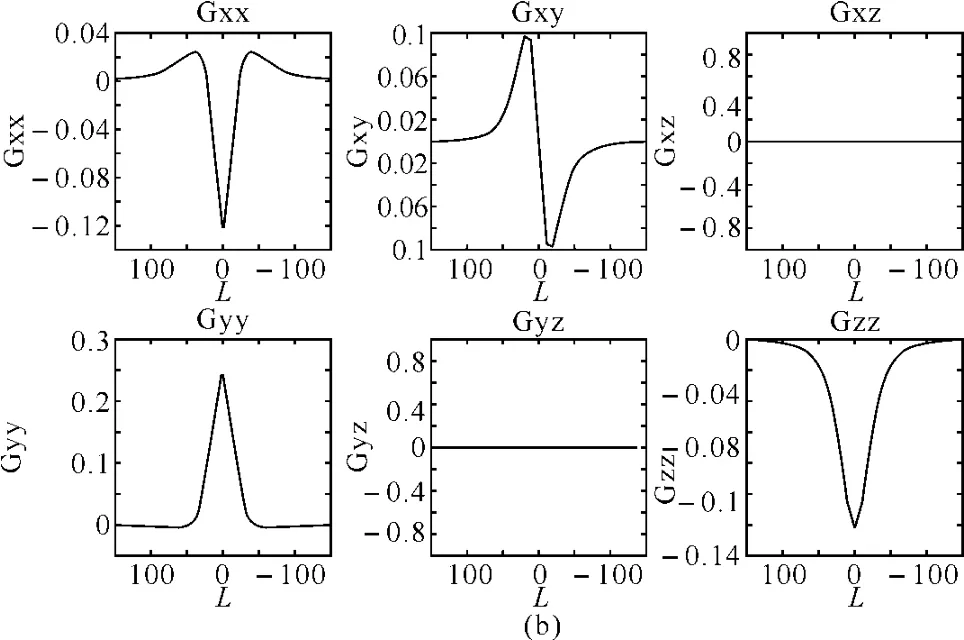
圖2 重力梯度變化曲線
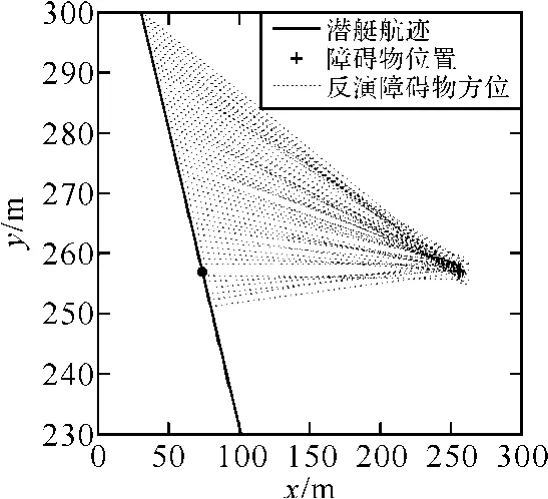
圖3 反演障礙物位置示意圖
4 結語
在我國大力發展重力梯度傳感器及測量技術的環境下,本文對重力異常和重力梯度在艦船方面的應用進行了預先研究,提出了一種通過重力異常反演去探測障礙物大致信息的水下潛艇避障方法,該方法借鑒了地球科學領域的重力異常測量和補償理論和技術,創造性地運用于艦船作戰系統和水下探測感知領域,促進了學科融合,具有重要的理論和實用價值。
[1]孫曄飛,聶其武.從美核潛艇觸礁看非戰時潛艇事故原因[J].環球軍事,2005(8):53~58
[2]海鷹.美軍核潛艇關島觸礁內幕[J].艦載武器,2005(3):17~21
[3]邊少鋒,紀兵.重力梯度儀的發展及其應用[J].地球物理學進展,2006,21(2):660~664
[4]Lin Wu,Jinwen Tian.Automated Gravity Gradient Tensor Inversion for Underwater Object Detection[J].Journal of Geophysics and Engineering,2010,7(4):410~416
[5]Lin Wu,Xin Tian,Jie Ma,et al.Underwater Object Detection Based on Gravity Gradient[J].IEEE Geoscience and Remote Sensing Letters,2009,7(2):362~265