基于PXI架構的導航信號模擬器設計
2011-06-13 11:58:18董立橋周雪娟
無線電工程 2011年3期
關鍵詞:信號
董立橋,周雪娟
(1.河北省衛星導航技術與裝備工程技術研究中心,河北石家莊050081;2.武漢大學,湖北武漢430072)
0 引言
任何接收機的研制,接收技術的突破都離不開信號模擬源的建設。美國的GPS和俄羅斯的GLONASS是較成熟的導航系統,歐洲Galileo系統推進了導航技術的現代化進程。同時為了實現自主導航技術的發展,我國Compass系統正在加緊建設中,衛星星座的建立正在按部就班地進行,Compass終端在國內乃至全球的廣泛應用將成為必然。Compass導航信號模擬器和多模導航信號模擬器的研制必須走在前面,這對于我國單模、多模接收機研制是強有力的支持。
為實現對多種導航系統信號體制仿真、研究、接收機開發等目的,導航信號模擬器必須具有足夠的靈活性,對各種仿真任務具有充分的可擴充性,需要完成對干擾環境和高動態等特性等的仿真,具有一定的擴展能力。
1 組成
1.1 總體構架
通用導航信號模擬器采用軟件無線電設計思想來構建,結構上采用PXI標準機箱結構,實現了板卡的通用化、模塊化,使之更加靈活和易于擴充配置。設計基于“上位機—PCI總線—DSP—FPGA—DAC—正交上變頻—射頻合路”的體系結構,在一個PXI機箱中完成數據仿真、電文生成和信號產生等功能。通用導航信號模擬器組成如圖1所示。
模擬器由上位機子系統和射頻信號產生子系統組成。上位機子系統為軟件應用程序,運行于PXI機箱的零槽CPU模塊;射頻信號產生子系統為硬件電路,板卡式結構,包括射頻信號產生板卡、射頻信號合路板卡和時頻信號分路板卡等。
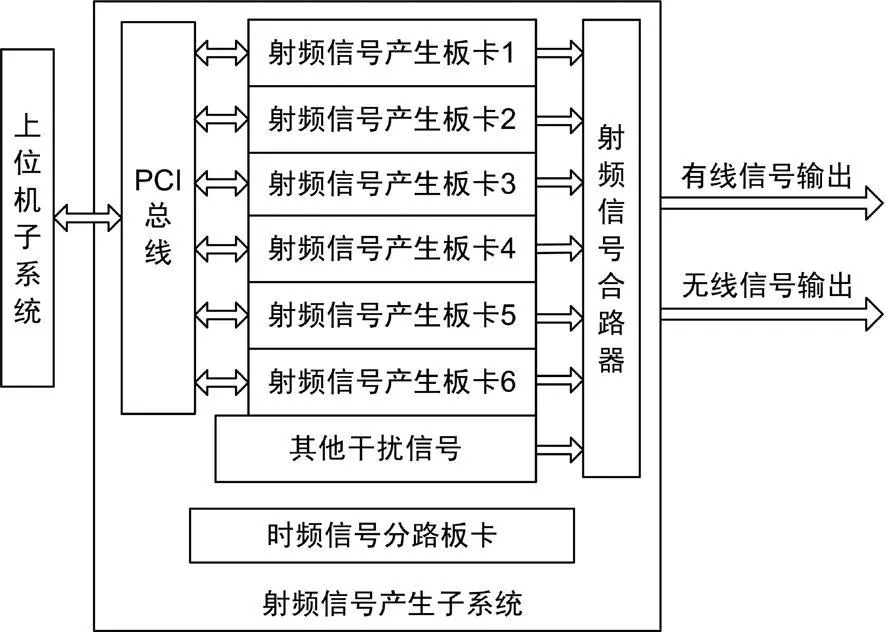
圖1 通用導航信號模擬器組成
1.2 上位機子系統
上位機子系統主要完成的功能有:衛星星座運行模擬;接收機(用戶)動態軌跡的生成模擬;衛星各種誤差建模;空間環境模擬;根據衛星星座的選擇,推算可見星的導航電文和星歷;仿真數據的分析存儲與處理;衛星星座星空視圖、可見星狀態參數、用戶GDOP數值和用戶實時運動軌跡等的實時顯示。由于篇幅限制,不再給出流程圖和代碼模塊簡介。
零槽模塊可以根據模擬星座和動態要求需要的運算量來進行配置,對于普通目的的模擬器現在商用的零槽板卡基本上就能滿足要求,操作系統選擇WINDOWS XP。
1.3 射頻信號產生子系統
射頻信號產生板卡是射頻信號產生子系統的重要組成部分,一般配置3~6塊。在一塊板卡上完成了基帶信號產生功能和本振頻綜功能和正交上變頻功能,其功能邏輯關系如圖2所示。
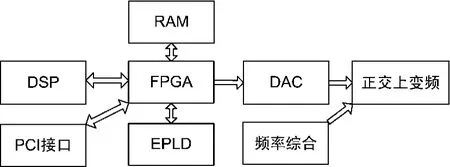
圖2 射頻信號產生板卡結構
板卡可以產生單頻點至少12顆衛星的射頻信號,模擬了衛星和用戶的相對運動,每顆衛星最多3條多徑信號,可以累加各種因素對信號的干擾。射頻板卡通過配置內置軟件可以實現GPS、Galileo或Compass系統的各種調制模式信號,射頻產生板卡可以根據系統要求進行裁剪和配置,若只需單個星座,僅3塊板卡就可完成全頻點全功能模擬。
射頻信號合路器為亦為板卡式結構,無源設計,設置有7路(按照2個完整星座系統配置)L波段信號輸入,其中6路為來自射頻信號產生板卡(2個完整星座系統),為衛星模擬射頻信號,1路為預留,用戶可以根據需要外接自己的信號源或干擾源。
時頻信號分路板卡,功能較為單一,完成外來時頻的分路,供多路射頻信號產生板卡使用。
2 關鍵技術
導航模擬器是一個全新的課題,涉及到正交調制、多星座模擬、多徑模擬和多種調制方式生成等關鍵技術,下面就部分技術實現進行簡單介紹。
2.1 正交調制技術
以QPSK信號產生為例,功率平衡QPSK信號可理解為二路載波正交的BPSK之和:

式中,I(n),Q(n)=±1;φ為初相;ω為載波角頻率,則
I、Q的4種組合分別對應4種相位,從而實現四相調制。
當已調信號的帶寬遠小于調制載波頻率時,對于任意已調信號來說,都可以用S(t)=R(t)cos[ωct+θ(t)]來表示,其中幅度R(t)和相位θ(t)表征了基帶信號的全部特征,R(t)表示該信號的幅度調制信息,θ(t)表示該信號的相位調制信息,將上式展開后有:

式中 ,I(t)=R(t)cosθ(t);Q(t)=R(t)sinθ(t),分別為I、Q 分量 。
由上式可知,通過調整I和Q的權值可以達到調整PSK調制信號的相位 θ和幅度R(t)的目的。調制的方法是根據該通道的相位參數 θ和幅度參數R(t)先求出I(t)、Q(t),然后分別與2個正交本振cosωct和sinωct相乘并求和,即可得到PSK調制信號S(t)。
由以上分析得知,要使用正交調制方案生成需要的信號,只需在基帶產生上述信號中的I(t)、Q(t),只要與正交本振信號去乘就能完成幾乎所有導航所需信號的調制。而且正交調制的好處是所有的射頻特征都在基帶得以體現,也就是說所需的射頻信號的幅度相位的模擬都可以在基帶完成,這樣為模擬器的實現提供了有力支持。
2.2 多普勒實現技術
當衛星和用戶發生了相對運動,多普勒頻移就產生了。多普勒頻移遵循公式,其中 Δf為當相對運動時附加在頻率量f上的多普勒頻移,v為衛星和用戶的相對速度,c為光速。
參照式(1)可推出,射頻信號多普勒頻移由碼多普勒和載波多普勒2部分組成。
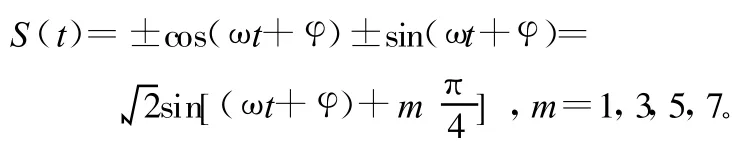
與碼多普勒不同,載波多普勒是累加在射頻本振頻率上的頻率偏移,很難實現,所以需要進行一定的變換,思路是在較低的頻率上實現多普勒頻疑和相移。重寫式(1)為:

式中,I、Q為基帶正交信號;fs為最終的頻率;φ為初始相位偏移。為了把射頻頻率分開,這里擬在基帶實現一個小中頻頻率的調制,中頻頻率選擇較小值,以便在FPGA內部可以很容易的實現,以GPS的L1頻點為例,射頻頻率為1 575.42,中頻頻率選擇其小數部分:1.42 MHz,則后端的正交調制本振為1 574 MHz,令fR=1 574 MHz,FI=1.42 MHz,則式(2)為:

由上述分析可知,射頻已調信號的多普勒頻偏和相位偏移都可以反映在小中頻上。碼多普勒和載波多普勒均可在FPGA內實現,其原理框圖如圖3所示。

圖3 基帶信號生成框圖
在基帶完成碼擴頻,小中頻調制,輸出正交的調制信號,送DA轉換器,DA后的工作僅為和正交的射頻本振相乘。以GPS L1為例,本振可以選取1 574 MHz。需要補充說明的是設計中的多星信號合成就是在如圖3所示產生的I′和Q′,送DA之前相加來實現的。
至于2個多普勒量的實現,該方案采取多級DDS調整方案,碼多普勒實現原理框圖如圖4所示。載波DDS的實現原理類似,不再給出。
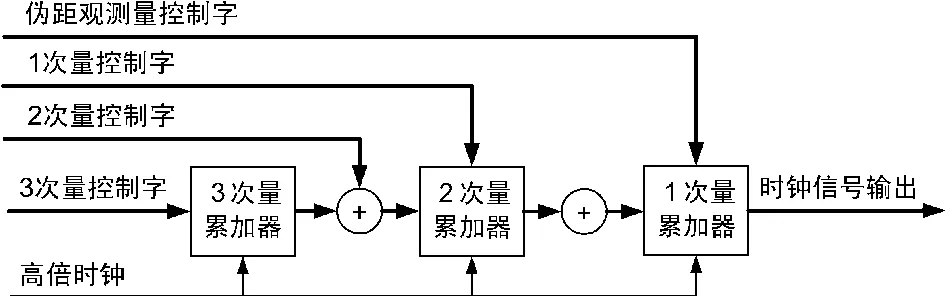
圖4 碼鐘方案原理
方案中使用了3級DDS,其中偽距控制字對應于偽距,1次量控制字對應于相對速度,2次量控制字對應相對加速度,3次量對應相對加加速度。所有這些量的計算可以由上位機來完成,射頻信號產生板卡上由DSP來完成控制字的計算和更新。
2.3 多徑模擬技術
多徑模擬是導航信號模擬器必不可少的功能,是模擬用戶周圍的反射物對衛星導航信號的反射,經延遲和衰減后再到達用戶機,與直達信號疊加的一種現象。
多徑實現起來有2種方案:①就像同頻點多衛星信號合成一樣,使用單獨的信號產生電路,控制其延遲和幅度,在輸出時和主徑信號取和;②基于多徑信號是主徑信號反射原理,在生成主徑信號后,將其處理,完成延遲和衰減,然后在和主徑信號相加。這2種方案原理上都是可操作和實現的,區別是前者使用了更多的軟硬件資源,精度更高一些,而后者節省了大量的資源開銷,能滿足一般的需求。
2.4 導航電文的生成
導航電文提供衛星的軌道位置、健康狀況和誤差等信息。導航電文的生成一般是以星歷文件為數據源,經過推算來獲得。
以GPS系統為例,讀取Rinex文件,獲得電離層延遲改正參數、與UTC時間同步參數、衛星鐘差參數以及星歷參數等,將獲得的這些數據保存在星歷參數結構體和歷書參數結構體中。
比較用戶設置的仿真起始時刻與星歷參數參考時刻,如果二者相差超過規定時間(一般取1小時),則進行星歷外推,在現有星歷參數的基礎上,外推得到一組與用戶設置的仿真起始時刻的整點時刻對應的星歷參數;反之,如果二者之差在規定時間之內,則不需要做星歷外推。
得到的星歷參數一方面用于衛星位置的計算,另一方面用于生成導航系統的一個超幀的下行電文。下行電文中的周內秒計數,通過計算得到:根據用戶設置的仿真起始時刻,估算出衛星信號發射時刻,與衛星信號發射時刻對應,首先得到一個超幀中第一個子幀的周內秒計數,后面子幀的周內秒計數在其上一子幀的周內秒基礎上加上一個子幀持續的時間。然后將上面得到的各個參數值除以ICD中指定的每個參數的量化單位,得到量化后的參數值。按照下行電文格式,將量化后的參數值賦值給下行電文中的各個比特。
2.5 時間同步的實現
無論是單模模擬器還是雙模,只要存在多頻點,都需要實現時間同步。該設計需要的時間頻率信號有10 MHz和1 pps信號,為了實現至少6塊板卡的同步,考慮引入一個時間頻率分路板卡,實現多路驅動輸出,保證了系統中的多路射頻信號產生板卡工作在統一的時頻下。
另外一個需要注意的是,由于上位機子系統是軟件系統,定時是靠計算機來完成的,遠遠不能滿足導航系統所需要的時間精度。而軟件系統計算的仿真數據又需要按照固定的節拍發送給射頻信號產生板卡,這里要求所有的時間節奏由射頻信號產生板卡來產生,在固定時刻通過PCI總線發送中斷給上位機,上位機響應中斷后只要在規定的時間內完成發送就可以做到軟件和硬件的同步。
3 結束語
北斗衛星導航系統的建設推動了國內導航信號模擬器的研究。但雙模或多模的導航信號模擬器還沒有能夠提供市場的產品,這也就決定了我國的多模接收機和芯片的研發水平還落后于國外。自主導航信號模擬器在市場上的推廣,將提供各接收機的研發、生產廠商一個廉價的開發、測試和試驗環境,加速我國的多模接收機研究進程,提高我國在高端接收機的研發和生產能力。
自主導航信號模擬器可為衛星導航在中國的推廣應用提供必要的支撐條件。同時也為GPS/GALILEO/Compass導航系統的組合應用提供一種開發手段,它的批量生產必將推動我國衛星導航產業的發展,也將使我國的接收機制造產業進入高端產品領域。
[1]趙少松,董立橋.通用導航信號模擬器的設計與實現[C].第十一屆全國遙感遙測遙控學術研討會論文集,2008:192-194.
[2]李 雋.衛星導航信號模擬器體系結構分析[J].無線電工程,2006,36(8)30-39.
[3]李征航,黃勁松.GPS測量與數據處理[M].武漢:武漢大學出版社,2005.
[4]劉基余.GPS衛星導航定位原理與方法[M].北京:科學出版社,2003:164-204.
[5]王 莉.區域衛星導航系統的星座設計與比較[J].飛行器測控學報,1999,18(4):1-8.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
