永磁無刷電動機在自動排線系統中的應用
2011-06-19 03:00:30周有立
微特電機 2011年3期
關鍵詞:系統
周有立
(溫州職業技術學院,浙江溫州325035)
0 引 言
自動排線在電線的卷取、紡織工業中紗錠、纖維的繞制等應用方面非常廣泛。一般繞線機是由放線系統、繞線系統、排線系統組成。要求被繞物以恒線速、恒張力卷取,而排線系統實現的目的是將被繞物按一定的間隙有規律、無重疊地排列。
傳統的自動排線電機使用有刷直流伺服電動機,機械換向器和電刷會引起諸多問題。碳刷及整流子在電機轉動時會產生火花,碳粉因此除了會造成組件損壞之外,使用場合也受到限制。也有人從實現開環無誤差跟隨結構、編程控制簡易等方面考慮選用步進電動機,但定位精度不高且易受影響。因為定位精度主要靠步進電動機的步距精度和傳動機構精度維持,而定位系統本身的精度誤差、機械磨損、溫度熱膨脹效應以及外界振動因素的影響,將會產生嚴重偏道現象,由于輸出未設置位置反饋信號,一旦嚴重偏道發生,定位系統是無能為力的。永磁無刷直流電動機具有響應快速、效率高、壽命長、轉動慣量低、起動轉矩較大、從零轉速至額定轉速具備可提供額定轉矩的性能,非常適合自動排線。
本文介紹了電纜廠家設計電線產線分盤機。分盤機是將大盤的線材按一定的長度收到小盤上并精密排列,如圖1所示。以NXP半導體公司LPC3250系列芯片控制核心,以永磁直流電動機為執行機構。繞線電機與排線電機根據設定線徑配合運動。采用編碼器反饋,雙閉環PI控制。
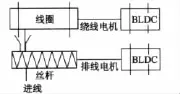
圖1 排線結構圖
1 自動排線系統執行機構的硬件結構
隨著電子電路以及大規模集成電路發展,ARM微處理器以及技術的應用已經滲透到工業控制各個領域。為開發自動排線系統提供了硬件基礎。自動排線系統硬件結構如圖2所示,控制芯片采用NXP公司LPC3250系列芯片,該芯片適用于要求高性能和低功耗結合的嵌入式應用中。片內集成了豐富的電機控制部件(事件管理器、PWM產生電路、ADC轉換模塊等),為實現無刷直流電動機控制提供了極大方便。
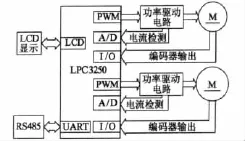
圖2 系統硬件結構圖
硬件上放棄了以前傳統IGBT以及驅動電路,執行器逆變電路采用智能功率模塊(IPM)。IPM內部集成了邏輯、控制、檢測和保護電路,使用方便,不僅減少了系統的體積,縮短了開發時間,也增強了系統的可靠性,適應了當今功率器件的發展方向。系統選用110ZW型電動機,其輸入電壓為300 V,額定電流4.2 A,額定轉速2 000 r/min。PS21265型IPM智能功率模塊,其額定電流20 A,額定電壓600 V。由于目前無刷直流電動機無位置傳感器控制技術或者利用霍爾換向元件的輸出實現調節的伺服控制系統,只能把速度調節到設定速度的±1% ~5%。本系統采用旋轉增量式編碼器,一周A、B相輸出500個脈沖,可利用90°相位差的A、B兩路信號進行倍頻,根據上升和下降沿分辨率達2 000,每轉輸出一個Z相脈沖以代表零位參考位。
2 自動排線系統執行機構軟件設計
自動排線系統需要絲桿來回移動,這需要電機頻繁正、反轉的運動傳動系統,為提高起動、制動、換向響應時間,采用速度和電流雙閉環系統。PID控制器作為經典控制理論中的線性調節器在實際應用中發揮著重要作用,其通過調節可以使被控量無靜差地跟隨設定值。而在電機的控制器中,為了避免實際輸出值中諧波噪聲的影響,一般不加入微分環節,只采用PI控制器。本系統采用如圖3所示的調速系統。
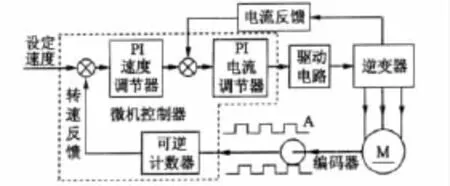
圖3 微機控制雙閉環直流調速系統原理框圖
直流電動機的數學模型計算是直流調速系統設計的重要環節,這里利用傳統方法,根據直流電動機的電氣方程和機械特性方程求得直流電動機的數學模型。
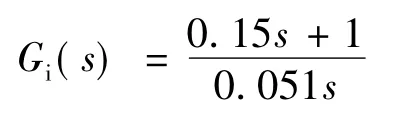
采用PI調節器,把電流環校正成典型Ⅰ型系統:
按照典型Ⅱ型系統的設計要求把速度設計成典型Ⅱ型:
經校正后的自動排線系統如圖4所示。

圖4 自動排線系統動態結構框圖
Matlab/Simulink仿真結果如圖5所示。超調44%,調節時間ts=0.5 s(誤差2%)。
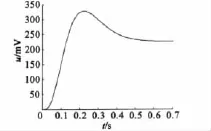
圖5 單位階躍響應曲線圖
通過電流環和轉速環的設計,系統已經具有了良好的穩態和動態性能。但是這種雙閉環系統的不足之處也是顯而易見的,轉速必然超調,對系統會沖擊,影響繞線質量。積分分離PI算法控制策略能抑制甚至徹底消除超調,既保證系統調整時間短,又使系統的超調減小。本系統采用傳統雙閉環設計,再通過Matlab仿真,達到預期的初步目的,再利用數字積分分離PI通過現場調試,實現并達到如下的響應曲線,如圖6所示。積分分離式PI算法如下:當被控量與設定值偏差較大時,取消積分作用,避免了由于積分作用造成系統穩定性降低、超調量增大的不利影響;當被控量接近給定值時,引入積分控制,從而消除靜差,提高控制精度。積分分離式PI形式如下:
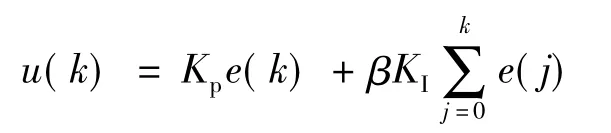
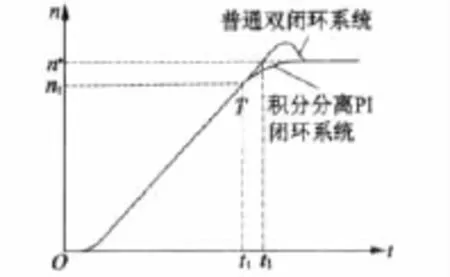
圖6 積分分離PI起動曲線圖
式中:β為積分項分離開關系數,
將實時操作系統μC/OS-II移植到LPC3250系統之后,應用程序設計就變得比較容易了。盡管自動排線系統的任務比較繁多,功能比較強大,但我們可以將比較復雜的任務模塊化,按照功能劃分為多個任務,各個任務可以分別編寫模塊程序,模塊化程序更容易開發與升級。無刷直流電動機的控制系統的軟件設計主要由如下幾部分構成:ARM各個事件管理器初始化程序、電機控制PWM模塊、閉環換向調節程序、中斷服務程序、電流環以及速度環調節程序。LPC3250的初始化主要完成系統時鐘、看門狗、I/O端口、系統中斷、各個控制寄存器及其中斷的設置,以及軟件中各變量的初始化和輔助寄存器的設置等功能。閉環換向調節程序由LPC3250負責根據編碼器采集到的信號,根據編碼器算法對電機進行換向調節。中斷服務程序的作用是根據定時器的溢出中斷而產生ADC采樣。而ADC中斷主要負責實時獲取電流采集信號A/D轉換結果,為LPC3250提供所需電流數據。電流環以及速度環調節根據采樣周期ΔT為間隔,對反饋電流和用編碼器反饋速度進行數字積分分離式PI計算,再經PWM輸出量進行控制。按照任務的重要性和系統響應對時間的要求分配優先級,對時間要求高的分配級數低,任務優先級越高。
3 結 語
我們利用經典雙閉環成熟經驗加嵌入式數字積分分離PI的調節器,開發周期短,借鑒資料多,開發的實用的自動排線繞線機,低速力矩大,運行平穩,調速比寬整機傳動平穩、排線整齊、噪聲小、計數準確。排線系統處理器采用嵌入式ARM9控制,操作采用觸摸人機界面控制操作方便靈活。經實際使用,反映良好,具有良好的應用價值及前景。
[1]桂文斌.基于DSP的電機雙閉環控制系統[J].工業控制計算機,2010,23(1):41-44.
[2]拉伯羅斯.嵌入式實時操作系統μC/OS-II(第二版)[M].邵貝貝,譯.北京:北京航空航天大學出版社,2003.
[3]周立功.ARM嵌入式系統基礎教程[M].北京:北京航空航天大學出版社,2005.
[4]梁靄明,馬平,陳愛民,等.永磁直流直線電機的雙閉環調速系統的設計與研究[J].機床與液壓,2010(2):18-20,53.
[5]李瑛瑛.雙閉環直流調速系統[J].裝備制造技術,2009(1):70-72.
[6]李仁定.電機的微機控制[M].北京:機械工業出版社,1999.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
