高速鐵路超大噸位自錨式拱橋轉體施工技術
2011-06-19 05:33:34何永昶上海鐵路局建設管理處
上海鐵道增刊 2011年2期
何永昶 上海鐵路局建設管理處
1 工程概況
橋梁的轉體施工技術在國內外應用頗多。滬杭高速鐵路分別在里程DK59+075.555~DK59+413.555處(跨滬杭高速公路)和DK1252+421.07處(海杭特大橋跨越石大公路)采用了自錨式水平轉體施工的上承式拱橋,橋跨布置均為(88+160+88)m。該橋結構形式新穎,且修建于軟土地基上,在時速350 km/h并鋪設無砟軌道的高速鐵路上應用,為世界首例。橋梁單鉸的轉體重量高達16 800 t,為世界同類轉體橋梁之最。橋梁的立面布置圖如圖1所示。

圖1(88+160+88)m自錨式體系上承式水平轉體拱橋立面圖
2 轉盤和球鉸施工技術
該橋的轉體結構由下轉盤、球鉸、上轉盤、轉體牽引系統、助推系統、軸線微調系統組成。轉動系統的構造圖如圖2所示。
2.1 安裝滑道、下球鉸
考慮到球鉸支架及滑道支架的安裝,下轉盤混凝土分兩次澆筑。首先澆筑2.5 m厚,然后在混凝土頂面預埋滑道和下球鉸骨架安裝定位埋件,澆筑剩余的1 m厚混凝土。
第一層澆筑的混凝土強度達到25%后,安裝預埋件安裝滑道骨架和下球鉸骨架,二者相對高差不大于5 mm。骨架中心和球鉸重合,其中心偏差不大于1 mm;骨架與埋件焊接牢固后,安裝下球鉸。

圖2 轉動系統的立面圖
滑道安裝時通過滑道定位架定位滑道鋼板,先把下滑道塊放入定位架上,利用定位架上的微調裝置進行調整,滑道板接縫高差要求≤0.5mm,相鄰高差≤0.2mm。安裝完成后,檢查全部滑到的平整度,確保滑道任何位置高差≤1 mm/3 m,然后擰緊螺栓。
加工好的球鉸用汽車吊機安裝在定位骨架上。具體工藝步驟如下:
(1)用吊機將上球鉸吊放置一邊,并在凸球面上涂油,用塑料、膠帶將其防護好以避免生銹損壞;
(2)將下球鉸吊放在預埋支架上,利用千斤頂頂推將球鉸,水平移動,使球鉸中心處于設計中心位置,然后將球鉸在水平位置限位;
(3)進行球鉸的高程調整。用S3級水準儀對下球鉸周邊平面十字線的四點進行粗調,然后用水平儀進行精調。調整后將其與預埋定位架進行定位焊接牢固。焊接完畢完后,再復查水平位置和高差一次;
(4)澆筑下球鉸混凝土,澆筑下球鉸前再再復查水平位置和高差,確保球鉸中心沒有變化,開始澆筑第二次下承臺混凝土。
由于下球鉸處鋼筋較密,灌筑條件差,混凝土流動性要良好。利用球鉸球面的振搗孔進行振搗,待混凝土溢出孔后封堵振搗孔。待混凝土強度達到50%后進行上球鉸安裝。同時,將助推反力座及牽引反力座一并澆注完成。
2.2 安裝上球鉸
(1)安裝下球鉸球面及聚四氟乙烯復合滑塊,安裝時由中間向邊緣,按照出廠編號逐排安裝。滑塊安裝完,用特制樣板檢查滑塊頂面是否處于同一球面。
(2)在下球鉸球面處涂黃油四氟粉,吊起上球鉸清理球面雜物后涂上黃油四氟粉,緩慢下放與下球面對中,精確調好后,將轉動軸涂上黃油四氟粉,插入上下球鉸軸套,并通過臨時限位裝置進行固定。
(3)將上下球鉸用膠帶密封防止雜物進入。
2.3 上轉盤施工
根據上轉盤構造特點,主要施工內容包括安裝安裝撐腳、臨時砂筒和牽引索。混凝土澆筑采用一次支模、一次澆筑成型,如圖3所示。
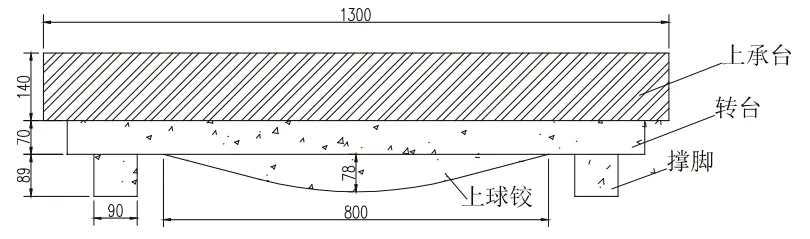
圖3 上轉盤施工示意圖
3 轉體實施施工技術
3.1 轉體結構牽引力及轉體時間計算3.1.1轉體結構牽引力計算
啟動時最小靜摩擦力矩為:

式中:
R為球鉸平面半徑,R=2m;μ為球鉸摩擦系數,μ靜=0.1,μ動=0.06;W為轉體總重量,W=168 000 kN。
計算得最小靜摩擦力矩:M=22 400 kN·m。
若轉體為理想的中心承重,則轉動時的啟動牽引力和轉動牽引力按照下式計算:

式中:
D為轉臺直徑。實際上轉體為不平衡轉動體系。假定轉體結構重心偏向后側,使一個支撐腿接觸環道,且控制該支腿最大支撐反力不超過2 000 kN,則需增加牽引力為:

式中:
R'為支撐腿半徑,取值5 m;N為支撐腿最大支撐力,取值2 000 kN。則牽引力計算公式為:

按照公式(4)計算得轉體施工的啟動牽引力為1 927 kN,轉動牽引力為1 156 kN。
3.1.2 轉體時間計算
轉動角速度要求不大于0.01-0.02 rad/min,轉體懸臂端線速度不大于1.5-2.0 m/min。實際施工時取規范最小值,轉體角速度 0.01 rad/min,即 0.57°/min。則轉體時間為:t=26°/(0.57°/min)=45.6 min。
橋梁實際轉體26°時,鋼絞線過鎬長度2.72 m,則鋼絞線牽引速度V=2.72/30=0.09 m/min。懸臂端線速度為36.3=1.21 m/min,滿足施工規范要求。
3.2 位置控制及微調系統
位置控制系統由千斤頂、反力座、限位梁、測量儀器等組成。
3.2.1 防過轉系統
該系統由助推反力座、限位梁以及厚橡膠板等組成。在轉體快到位前,在反力座上設置限位梁和厚橡膠板,對撐腳進行限制,防止過轉。
3.2.2 配重
配重原則是使轉體上部結構的重心垂線落于球鉸軸心線偏后一側(重心垂線仍落于球鉸支撐面上),或使上轉盤后側撐腳落于滑道上。通過配重達到轉體過程3個有效支撐點即球鉸及靠后側的2個撐腳,形成可控的穩定體系,不會發生瞬時任意方向傾斜的現象。
3.2.3 外環輔助防傾保險裝置
在下球鉸承臺平面上設置4處外環輔助防傾保險鋼構墩,鋼構墩與上轉盤橋墩下平面間預留一定空隙。轉體過程中如上部轉體結構發生傾斜,輔助墩受力支撐。外環輔助防傾保險裝置如圖4所示。
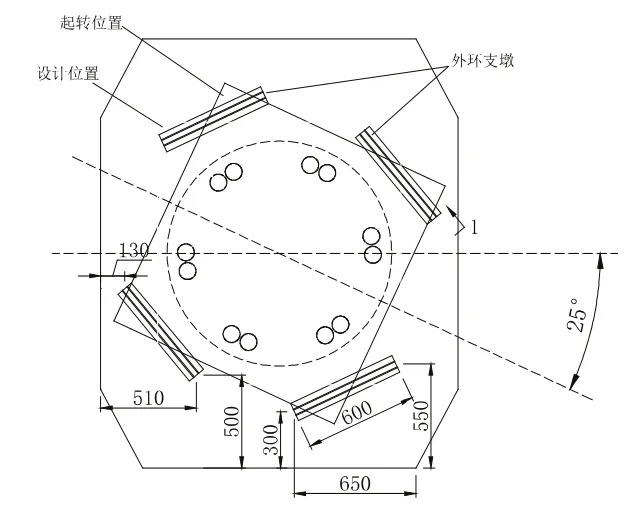
圖4 外環輔助防傾保險裝置圖(單位:cm)
3.2.4 微調系統
在轉體過程中發生偏位超標時,用微調系統進行調整,以使轉體繼續。在轉體完成后,利用微調系統將2個轉體的技術參數調整到允許范圍內。微調系統包括軸向微調及橫向微調。
3.3 稱重試驗
3.3.1 稱重的主要測試內容
在試轉前,進行不平衡稱重試驗,測試轉體部分的不平衡力矩、偏心矩、摩阻力矩及摩阻系數等參數,實現橋梁轉體的配重,達到安全施工、平穩轉體的目的。
3.3.2 試驗方法
由于球鉸體系的制作安裝誤差和拱肋質量分布差異以及預應力張拉誤差,導致兩側拱段剛度不同,質量分布不同,從而產生不平衡力矩。為保證體系平穩轉動,要求預先調整結構體系的質量分布,使其處于平衡狀態。
稱重試驗原理如下:以球鉸為中心,順、反時針力矩的和應為0,使得轉動體系能夠平衡轉動,當結構本身力矩不能平衡時,需增加配重使之平衡。
根據實測偏心結果,對于縱向偏心,采用在結構頂面偏心反向位置,距離墩身中心線一定距離的懸臂段,配以水箱作為配重糾偏。
3.4 試轉
試轉時實際測試啟動牽引力T0、單位時間轉動的角度及懸臂端轉動的水平弧線距離(每點動一次懸臂端所轉動水平弧線距離)三項內容。
首先分級加載,依次為額定壓力的30%(600 kN)、50%(1 000 kN)。此時若主梁未轉動,再按每級5%加載直到計算啟動力值為止。若主梁仍未被頂動則應停止頂推,檢查所有的頂推設備、糾偏裝置、滑動機構等,并分析原因。
3.5 轉體施工
在完成準備工作,并經過試轉后,方可進入正式轉體施工。轉體過程中遵循以下的控制原則:
3.5.1 啟動牽引力控制
根據試轉前確定的啟動牽引力T0,分級加載到位。
3.5.2 轉體過程控制
轉體啟動后,將動力系數調整到預計的牽引力并使其在"自動"狀態下運行。
在橋面中心軸線合攏前1.5m,橋面監控人員開始每10 cm給主控臺報告一次監測數據;在20 cm內,每1 cm報一次;即將到位時準確對梁的中軸線進行貫通測量。
3.5.3 就位控制措施
(1)轉體前在轉臺上設置弧長及角度觀測標尺,轉體過程中進行觀測控制。
(2)根據試轉時確定的慣性大小,提前停止自動連續頂推,改為點動操作。
(3)利用助推反力座安裝限位裝置,防止過轉。
3.5.4軸線與高程控制
3.6 轉體后鎖定
轉體就位后,迅速進行轉體結構軸線與高程的調整工作。
首先利用轉體牽引設備逐步將轉體軸線調整到位,軸線偏差控制在2 mm以內;然后利用永久撐腳安裝限位裝置,限制結構轉動;接著進行標高調整,誤差控制在5 mm以內。
標高和軸線調整符合要求后,立即進行上下轉盤的鎖定工作,然后綁扎鋼筋立模,澆筑封鉸混凝土。
4 結論
通過滬杭高速鐵路(88+160+88)m自錨式水平轉體施工拱橋的具體施工,有以下幾點結論:
(1)球鉸和轉盤的施工精度控制是難點,如果球鉸能夠工廠制作,采用大型起吊設備,現場整體吊裝,可方便位置控制。
(2)位置控制系統和微調系統是超大噸位轉體施工必不可少的輔助措施,是保證施工精度的關鍵。
(3)轉體施工要建立統一協調的指揮系統,并事先進行試轉演習,保證各個操作人員配合協調默契。
猜你喜歡
現代裝飾(2022年5期)2022-10-13 08:48:04
工業設計(2022年8期)2022-09-09 07:43:20
建材發展導向(2022年10期)2022-07-28 03:04:00
建材發展導向(2021年9期)2021-07-16 07:11:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
水利規劃與設計(2020年1期)2020-05-25 08:01:30
小哥白尼(趣味科學)(2019年3期)2019-06-17 11:57:44
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國房地產業(2016年2期)2016-03-01 01:25:48