基于Gaussian-支持向量回歸機(jī)的高速公路短時(shí)交通量預(yù)測*
2011-07-09 08:12:14趙澤輝康海貴李明偉周鵬飛莫仁杰
趙澤輝 康海貴 李明偉 周鵬飛 莫仁杰
(大連理工大學(xué)工程建設(shè)學(xué)部1) 大連 116024) (河南省濟(jì)邵高速公路有限公司2) 濟(jì)源 454600)
高速公路迅猛發(fā)展,以交通控制與誘導(dǎo)系統(tǒng)為核心的智能交通系統(tǒng)ITS[1]應(yīng)運(yùn)而生,而實(shí)現(xiàn)ITS的關(guān)鍵問題是實(shí)時(shí)準(zhǔn)確的進(jìn)行交通量預(yù)測[2],是進(jìn)行高速公路的路況分析、事件檢測及預(yù)測和預(yù)防交通擁堵的先決條件.因此,對(duì)高速公路短時(shí)交通量的準(zhǔn)確實(shí)時(shí)預(yù)測已成為高速公路智能化管理的一個(gè)重要環(huán)節(jié).在短時(shí)交通量預(yù)測方面,大致可以分為兩類:一類是基于確定數(shù)學(xué)模型的方法如時(shí)間序列預(yù)測模型和卡爾曼濾波模型等,另一類是基于知識(shí)的智能模型的預(yù)測方法如神經(jīng)網(wǎng)絡(luò)模型[3]、基于混沌理論的模型[4]等.支持向量回歸機(jī)(support vector regression,SVR)采用結(jié)構(gòu)風(fēng)險(xiǎn)最小化原則替代經(jīng)驗(yàn)風(fēng)險(xiǎn)最小化原則,能根據(jù)有限的樣本信息,在模型的復(fù)雜性和學(xué)習(xí)能力之間尋求最佳折中[5],克服了神經(jīng)網(wǎng)絡(luò)算法存在的全局搜索能力差或易收斂于局部最小等缺陷[6],在解決實(shí)時(shí)性、波動(dòng)性和非線性問題中表現(xiàn)出許多特有的優(yōu)勢(shì),應(yīng)用于短時(shí)交通量的預(yù)測取得了較好的效果[7-8].本文利用遺傳算法(GA)進(jìn)行Gaussian-SVR模型參數(shù)的優(yōu)選,在預(yù)測過程中,綜合考慮了預(yù)測路段前幾個(gè)時(shí)段交通量、天氣因素和出行日期的影響,結(jié)合長濟(jì)高速公路某段西行方向的實(shí)測交通量進(jìn)行仿真預(yù)測,并進(jìn)行了對(duì)比分析.
1 基于Gaussian損失函數(shù)的支持向量回歸機(jī)
1.1 ε-損失函數(shù)支持向量回歸機(jī)
設(shè)已知訓(xùn)練集T={(x1,y1),…,(xl,yl)}.式中:xi∈Rd;yi∈R,i=1,2,…,l,損失函數(shù)ε為:c(xi,yi,f(xi))=|yi-f(xi)|ε,其 中:|yi-f(xi)|ε=max{0,|yi-f(xi)|-ε},此時(shí)基于ε-損失函數(shù)支持向量回歸機(jī)問題為:

式中:ω為d維列向量;C(C>0)為懲罰系數(shù);ζ(*)=(ζ1,ζ*1,…,ζl,ζ*l)為松弛變量.
引入Lagrange函數(shù)

式中:乘子a(*),η(*)≥0,為求它的極小,分別對(duì)ω,b和ζ(*)計(jì)算偏導(dǎo)數(shù),并同時(shí)引入核函數(shù)K(xi,yi),整理后得到問題(1)的對(duì)偶問題為

1.2 Gaussian損失函數(shù)的支持向量回歸機(jī)
設(shè)訓(xùn)練集T={(x1,y1),…,(xl,yl)}中的樣本點(diǎn)是由一個(gè)基本函數(shù)依賴關(guān)系ftrue和噪聲產(chǎn)生的,即

當(dāng)噪聲的密度函數(shù)p(ζi)已知,則在最大似然意義下,最優(yōu)的損失函數(shù)是

證明對(duì)式xf?{(x1,y1),…,(xl,yl)}的最大似然估計(jì)是
由式(5)和上式,得到

本文采用高斯函數(shù)進(jìn)行降噪處理,此時(shí)噪聲的密度函數(shù)為Gaussian函數(shù),則有

由式(5)知

此時(shí),基于Gaussian損失函數(shù)的SVR為
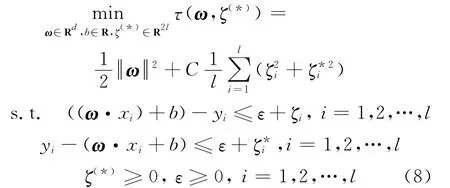
式中:ω為d維列向量;C(C>0)為懲罰系數(shù);ζ(*)=(ζ1,…,ζl)為松弛變量.
基于Gaussian損失函數(shù)的SVR模型算法步驟為
步驟1設(shè)已知訓(xùn)練集T={(x1,y1),…,
步驟2選擇適當(dāng)正數(shù)ε和C,以及核函數(shù)K(xi,yi),本文核函數(shù)選為徑向基函數(shù).
步驟3構(gòu)造并求解最優(yōu)化問題
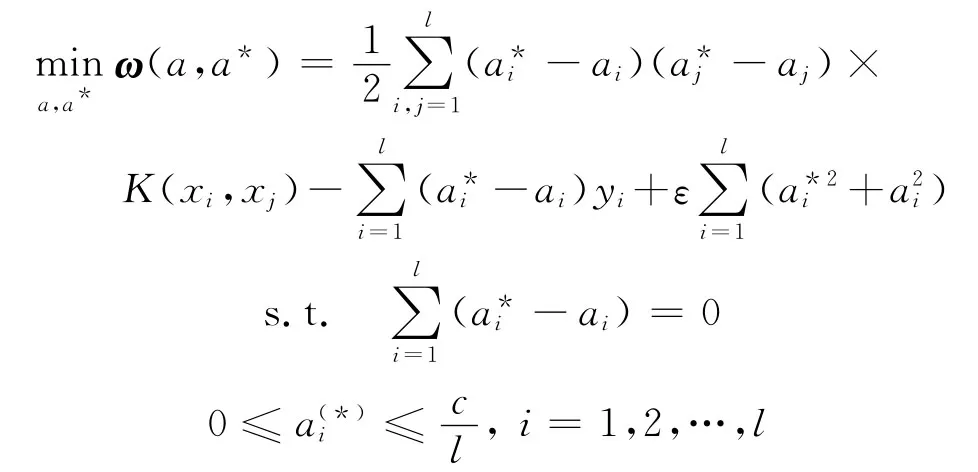
得到最優(yōu)解a(*)=(a1,…,ai;,…,).
步驟4構(gòu)造決策函數(shù)

式中:按下式計(jì)算,選擇位于開區(qū)間(0,C/l)中的2個(gè)分量或,若選到的是,則

若選到的是,則

2 基于GA優(yōu)化的Gaussian-SVR短時(shí)交通量預(yù)測步驟
考慮到Gaussian-SVR參數(shù)的選取在一定程度上影響著模型的精度,本文應(yīng)用遺傳算法對(duì)Gaussian-SVR參數(shù)ε,C和δ2進(jìn)行優(yōu)選.
以訓(xùn)練結(jié)束后返回的回歸序列方差的倒數(shù)作為進(jìn)化個(gè)體的適應(yīng)值fitness

式中:n為輸入樣本個(gè)數(shù);Y1(t)為回歸序列;Y(t)為實(shí)際序列值.GA-Gaussian-SVR預(yù)測模型的計(jì)算步驟如下.
步驟1歸一化處理.對(duì)實(shí)測量數(shù)據(jù)集和Gaussian-SVR參數(shù)的初始區(qū)間按式(12)進(jìn)行歸一化處理.

步驟2初始化父代群體.設(shè)種群規(guī)模為m,隨機(jī)生成父代群體y(j,i)(j=1,2,3;i=1,2,…,m),本文取m=50,其中y(j,i)為第i個(gè)父代染色體上的第j個(gè)基因.
步驟3模型訓(xùn)練.以生成的每個(gè)染色體上的基因作為Gaussian-SVR參數(shù),訓(xùn)練Gaussian-SVR模型,計(jì)算相應(yīng)的回歸序列,并根據(jù)回歸序列按式(11)計(jì)算染色體的適應(yīng)度值.
步驟4終止判斷.判斷當(dāng)前種群中最優(yōu)個(gè)體是否滿足終止準(zhǔn)則,若滿足轉(zhuǎn)入步驟7,否則轉(zhuǎn)入步驟5,進(jìn)化代數(shù)g=g+1.終止準(zhǔn)則采用最大進(jìn)化代數(shù)Gmax與相鄰進(jìn)化代數(shù)最優(yōu)個(gè)體適應(yīng)值相對(duì)誤差E相結(jié)合.
步驟5選擇、交叉和變異.根據(jù)步驟3計(jì)算所得的染色體的適應(yīng)度值,進(jìn)行選擇、交叉和變異操作.
步驟6生成子代新個(gè)體.由步驟5得到的3m個(gè)子代個(gè)體,按照其適應(yīng)值fitness從大到小進(jìn)行排序,取排在最前面的m個(gè)子代個(gè)體作為新的父代群體.轉(zhuǎn)入步驟3進(jìn)入下一輪演化過程.
步驟7模型預(yù)測.以當(dāng)前種群中最優(yōu)個(gè)體的染色體基因ε,和δ作為Gaussian-SVR參數(shù)訓(xùn)練模型,輸入待測樣本,輸出預(yù)測值.
計(jì)算流程見圖1.
3 實(shí)例預(yù)測與性能分析
3.1 高速公路交通量預(yù)測影響因素選擇
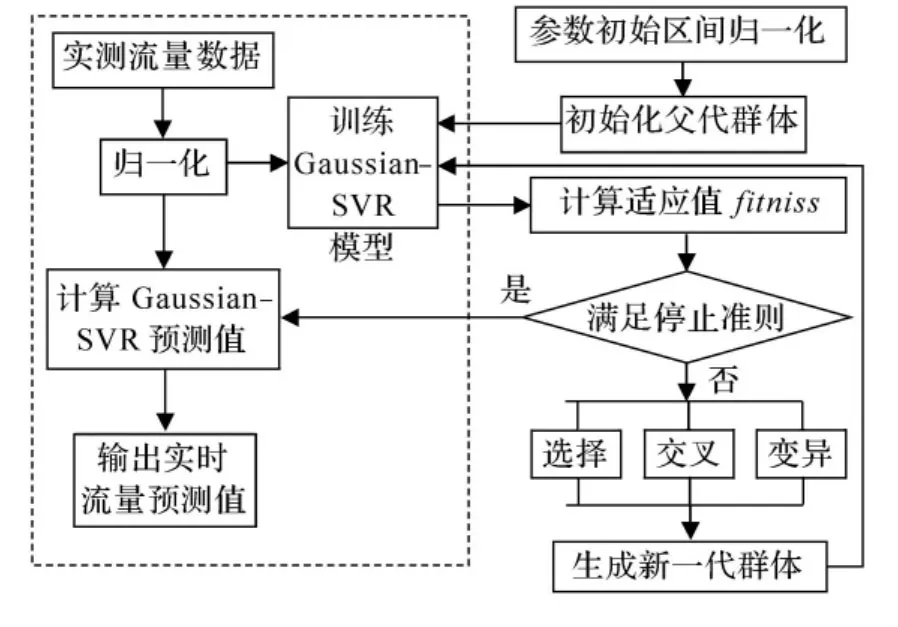
圖1 算法流程圖
交通流具有流體的特性,在時(shí)間上的分布是連續(xù)的,某路段下一時(shí)刻的交通量與本路段前幾個(gè)時(shí)段的交通量有著必然的聯(lián)系,所以可以利用本路段前幾個(gè)時(shí)段的交通量數(shù)據(jù)預(yù)測該路段下一時(shí)段的交通量,t表示交通量觀測的當(dāng)前時(shí)段,Y(t-3),Y(t-2),Y(t-1),Y(t)為預(yù)測路段前4個(gè)時(shí)段的交通量,Y(t+1)為預(yù)測路段下一時(shí)段的交通量,因此,該路段t+1時(shí)刻交通量Y(t+1)的大小受交通量Y(t-3),Y(t-2),Y(t-1),Y(t)共同作用的影響.
考慮到高速公路通行在很大程度上受到天氣變化的影響,引入第五個(gè)輸入?yún)?shù)X1(t),X1(t)其量化方法為大雪或大雨雪為1,小雪或小雨雪為0.75,大雨為0.5,小雨為0.25,晴或多云為0.同時(shí)人們出行習(xí)慣也會(huì)對(duì)高速公路交通量產(chǎn)生影響,交通量以周為周期,在每周的不同天中,可能具有不同的變化規(guī)律,特別是在周末通行量會(huì)增多.因此,將出行日期作為模型的第六個(gè)輸入?yún)?shù)X2(t).其量化方法為周一為1/7,周二為2/7,周三為3/7,周四為4/7,周五為5/7,周六為6/7,周日為7/7.至此,得到了影響預(yù)測路段下一時(shí)段交通量的6個(gè)影響因素X,作為模型的的輸入向量.
本文試驗(yàn)部分采用長濟(jì)高速公路濟(jì)源市內(nèi)某路段西行方向的交通量檢測儀于2009-06-01至2010-06-07一周內(nèi)獲取交通量數(shù)據(jù),采集時(shí)段為10min,選取240組交通量數(shù)據(jù)并對(duì)其相應(yīng)的天氣和獲取日期進(jìn)行量化處理,組成模型訓(xùn)練樣本集,選取40組數(shù)據(jù)作為測試樣本集.
3.2 模型實(shí)例預(yù)測與性能分析
利用 Matlab 7.1編制 GA-Gaussian-SVR模型程序,運(yùn)行環(huán)境為:Core(TM)2CPU,1.81 MHz,2GB 內(nèi) 存 的 微 機(jī),操 作 系 統(tǒng):WindowsXP.模 型 初 始 值:C的 取 值 范 圍 為 [1,2 000],ε的取值范圍為[0,2 000],δ的取值范圍為[0,20],最大進(jìn)化代數(shù)Gmax=1 000,鄰代最優(yōu)個(gè)體適應(yīng)值相對(duì)誤差E=0.000 1.應(yīng)用本文提出的模型,經(jīng)過訓(xùn)練得到全局參數(shù)最優(yōu)組合為C=213,ε=41和δ=0.23.將優(yōu)化后的模型用于測試樣本集的交通量預(yù)測.實(shí)際交通量與模型仿真輸出流量的對(duì)比圖和部分實(shí)際交通量與模型預(yù)測結(jié)果見圖2和表1,結(jié)果表明,預(yù)測結(jié)果曲線與實(shí)際交通量的變化曲線基本吻合,絕對(duì)誤差值基本控制在[-7,7]區(qū)間內(nèi),只有少量超出這個(gè)范圍,預(yù)測結(jié)果達(dá)到了預(yù)期的預(yù)測效果.
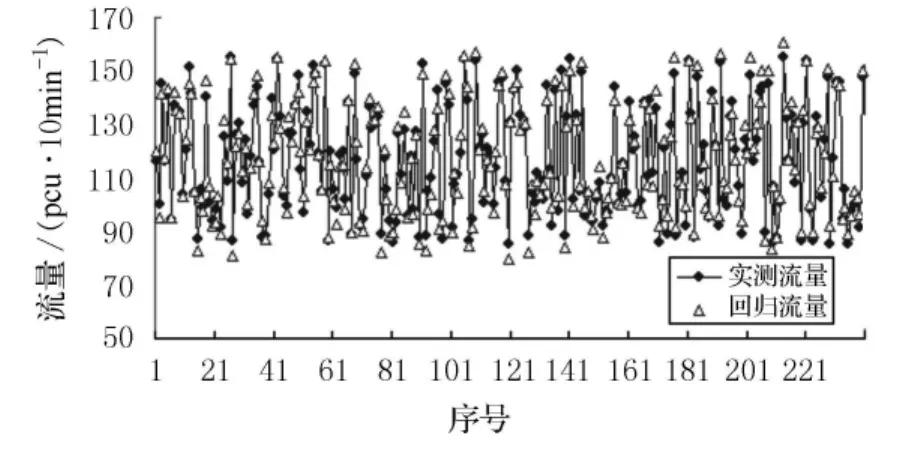
圖2 GA-Gaussian-SVR模型訓(xùn)練效果圖
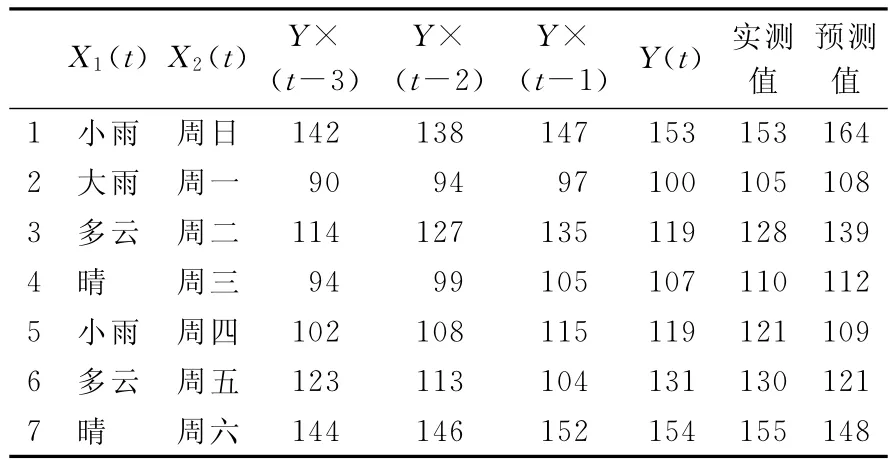
表1 部分實(shí)測流量與模型預(yù)測流量結(jié)果pcu/(10min)
為了比較GA-Gaussian-SVR模型的預(yù)測性能,本文選擇文獻(xiàn)[3]提出的PSO-BP神經(jīng)網(wǎng)絡(luò)模型、文獻(xiàn)[8]中提出的 WA-SVM預(yù)測模型和文獻(xiàn)[7]提出的G-SVR預(yù)測模型進(jìn)行對(duì)比分析.為了使對(duì)比模型具有可比性,4個(gè)模型均在同一臺(tái)微機(jī)上進(jìn)行計(jì)算,均使用matlab 7.1進(jìn)行編程.考慮到尋優(yōu)次數(shù)的增加也會(huì)提高優(yōu)化效果,對(duì)比模型參數(shù)的選取應(yīng)保證每個(gè)模型的最大尋優(yōu)次數(shù)相同,對(duì)PSO-BP神經(jīng)網(wǎng)絡(luò)模型優(yōu)選次數(shù)的設(shè)定,應(yīng)綜合考慮PSO算法和BP神經(jīng)網(wǎng)絡(luò)的尋優(yōu)次數(shù),保證與GA算法具有相同的最大優(yōu)選次數(shù),對(duì)WA-SVM預(yù)測模型參數(shù)的選擇,進(jìn)行多次交叉試算,盡可能的保證SVR參數(shù)的選擇精度.并采用以下3個(gè)評(píng)價(jià)指標(biāo)進(jìn)行性能對(duì)比分析
1)平均絕對(duì)相對(duì)誤差
2)最大絕對(duì)相對(duì)誤差

3)均方根誤差
設(shè)定對(duì)比模型參數(shù),結(jié)合實(shí)測交通量數(shù)據(jù)分別進(jìn)行模型訓(xùn)練,并對(duì)測試樣本進(jìn)行預(yù)測,將預(yù)測結(jié)果分別進(jìn)行誤差指標(biāo)處理,處理結(jié)果如表2所列.
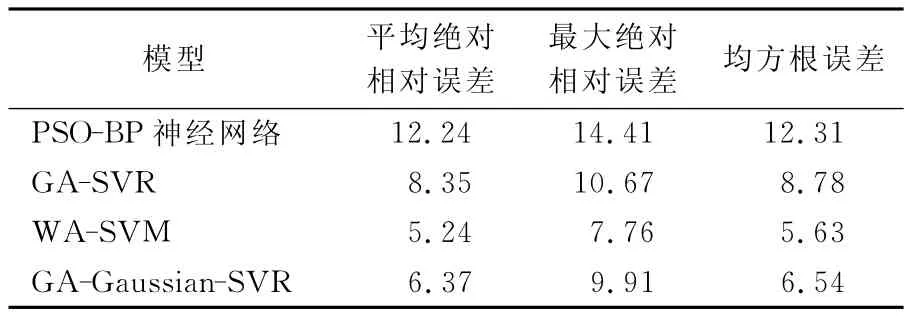
表2 預(yù)測誤差指標(biāo)比較 %
從表2中可以看出,在逼近原始流量序列的能力方面,SVM的預(yù)測方法明顯優(yōu)于PSO-BP神經(jīng)網(wǎng)絡(luò)模型.在對(duì)基于不同損失函數(shù)的SVM比較方面,采用高斯損失函數(shù)GA-Gaussian-SVR模型的誤差指標(biāo)值均優(yōu)于GA-SVR模型,說明在交通量序列中存在著成正態(tài)分布的噪聲,基于Gaussian損失函數(shù)的Gaussian-SVR模型對(duì)序列中的噪聲進(jìn)行了有效的處理,提高了模型的預(yù)測精度.在對(duì)噪聲處理比較方面,本文提出的模型的預(yù)測精度略低于 WA-SVM模型,但小波分析過程復(fù)雜,不利于ITS系統(tǒng)自動(dòng)操作,特別是對(duì)于實(shí)時(shí)交通量預(yù)測而言,在保證一定精度的范圍內(nèi),操作的復(fù)雜程度和時(shí)間消耗更值得關(guān)注,從這個(gè)意義上講,本文提出的模型更適用于高速公路短時(shí)交通量預(yù)測.
4 結(jié)束語
從上述實(shí)例對(duì)比分析中可以看出:采用結(jié)構(gòu)風(fēng)險(xiǎn)最小化原則的SVR模型克服了神經(jīng)網(wǎng)絡(luò)模型存在的全局搜索能力差或易收斂于局部最小等缺陷,取得了較好的預(yù)測效果,Gaussian損失函數(shù)的引入彌補(bǔ)了SVR模型無法對(duì)序列內(nèi)噪聲進(jìn)行有效處理的不足,從而進(jìn)一步提高了模型的預(yù)測精度.針對(duì)運(yùn)行時(shí)間開銷主要取決于模型參數(shù)的尋優(yōu)階段,應(yīng)用GA進(jìn)行Gaussian-SVR模型參數(shù)的優(yōu)選,縮短模型尋優(yōu)階段的時(shí)間,提高尋優(yōu)效率,更適合于系統(tǒng)一定時(shí)段內(nèi),利用新的數(shù)據(jù)進(jìn)行模型參數(shù)的自動(dòng)更新.在預(yù)測過程中,本文綜合考慮了長濟(jì)高速公路西行方向前四個(gè)時(shí)段的交通量、天氣和出行日期6個(gè)因素的影響,為對(duì)交通量進(jìn)行精確預(yù)測提供數(shù)據(jù)保障,實(shí)例分析過程中,實(shí)測流量與模型預(yù)測流量非常接近,達(dá)到了模型的預(yù)期效果,表明該模型適用于對(duì)高速公路短時(shí)交通流的預(yù)測.
[1]Mark D B.Peering into the future:peer-to-pee technology as a model for fistributed joint battlespace intelligence dissemination and operational tasking[D].Maxwell Field,Alabama,USA:PhD's Thesis of School of Advanced Airpower Studies,Air University,2001.
[2]David P J.Rationality and self-interest in peer to peer networks[A].Proceedings of the 2nd International Workshop on Peer-to-PeerSystems IPTPS'03[C]//Claremont Hotel, Berkeley, CA, USA:Springer press,2003.
[3]葉 嫣,呂智林.基于粒子群優(yōu)化的神經(jīng)網(wǎng)絡(luò)短時(shí)交通流量預(yù)測[J].計(jì)算機(jī)工程與設(shè)計(jì),2009,30(18):4 296-4 299.
[4]郭 敏,藍(lán)金輝,肖 翔,等.基于混沌理論對(duì)北京二環(huán)路進(jìn)行短時(shí)交通流量預(yù)測的研究[J].交通運(yùn)輸系統(tǒng)工程與信息,2010,10(2):107-110.
[5]Vapnik V.The nature of statistical learning theory[M].New York:Springer,1995.
[6]Cao J R,Cai A N.A robust shot transition detection method based on support vector machine in compressed domain[J].Pattern Recognition Letters,2007,28(12):1 534-1 540.
[7]任其亮,謝小淞,彭其淵.城市道路交通量短時(shí)預(yù)測的GSVMR模型[J].公路交通科技,2008,2(52):135-138.
[8]朱勝雪,周 君,包 旭.基于小波分解-支持向量機(jī)的短時(shí)交通量預(yù)測[J].蘇州科技學(xué)院學(xué)報(bào):工程技術(shù)版,2007,20(3):80-85.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
建材發(fā)展導(dǎo)向(2021年20期)2021-11-20 05:43:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小學(xué)閱讀指南·低年級(jí)版(2017年11期)2017-12-06 15:14:59
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中國交通信息化(2016年9期)2016-06-06 07:42:10
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06
