基于變論域模糊控制的溫室環境控制系統的設計*
2011-07-25 00:34:10何海燕薛河儒
網絡安全與數據管理 2011年18期
何海燕,薛河儒
(內蒙古農業大學 計算機與信息工程學院,內蒙古 呼和浩特010018)
隨著農業的不斷發展,設施農業將成為未來農業的主旋律,因此發展溫室種植成為提高經濟效益、改善農業生態環境的一種有效途徑。溫室生產以達到調節產期、促進生長發育、提高質量和產量為目的。而溫室設施的關鍵是溫室環境控制,調節溫室環境的溫度、濕度、CO2濃度、光照等環境因子,使植物一直在最佳的生長環境下成長。
溫室環境控制即實現溫室的智能化管理,根據溫室環境控制系統把當前的溫室環境參數自動調節到植物最佳的生長環境。溫室環境系統是一個多變量、大慣性的非線性系統,且有交連、時延等現象,很難對這類系統建立精確的數學模型。應用基于BP神經網絡的變論域模糊控制方法對溫室環境進行控制,則不需要建立精確的數學模型,解決了模糊控制中初始論域選擇不當對溫室控制的影響,也無需過多的專業知識。基于BP神經網絡的變論域模糊控制方法不僅使溫室環境控制更加精確,而且控制系統的建立也變得更加容易。
1 控制系統的結構及原理
1.1 控制系統的結構
系統結構如圖1所示,傳感器采集到室內和室外的溫度,經過變論域模糊控制系統得出控制決策,并通過被控對象進行加熱和開窗操作。變論域模糊控制系統采用基于BP神經網絡的變論域模糊控制算法。
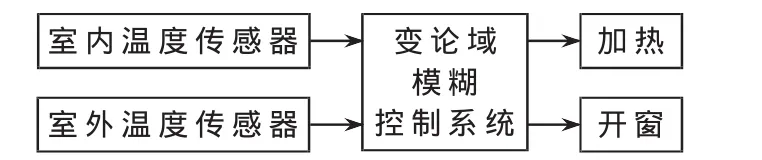
圖1 系統結構框圖
1.2 基本原理
1.2.1 變論域模糊控制
在溫室環境控制過程中,由于溫室環境是一個多變量的非線性系統,難以建立數學模型,雖然使用模糊控制不需要建立精確的數學模型,但初始論域的選擇卻對整個控制的精度有很大的影響。因此,變論域模糊控制能解決初始論域選擇的問題[1]。
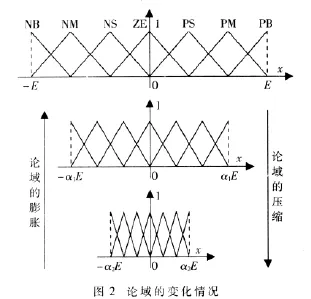
變論域是在論域上模糊劃分不變的前提下,論域隨著誤差的變小而收縮,亦隨著誤差的變大而膨脹,通過論域的變換,將專家總結出來的初始規則庫變成更加有效的新規則庫。表面上看,規則的個數沒有變化,但是由于論域的收縮而使得規則局部加細,相當于增加規則數,從而提高了控制精度[2]。論域的變化情況如圖2所示。
1.2.2 BP神經網絡
BP神經網絡即誤差反向傳播網絡,是由輸入層、隱含層、輸出層三部分組成的多層前饋網絡。當給定一個輸入時,從輸入層到輸出層的傳遞是一個前向傳播過程,如果實際輸出與期望輸出存在一定的誤差,則轉入誤差反向傳播的階段,并根據各層誤差的大小來調節各層的權值,如此不斷迭代修正各層的權值直到收斂,結構如圖 3所示[3]。
2 系統的總體設計
2.1 系統的原理
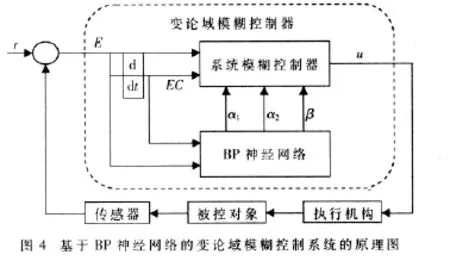
基于BP神經網絡的變論域模糊控制由模糊控制技術與BP神經網絡相結合構成,它兼有模糊推理的語言表達能力和BP神經網絡的自學習能力。基于BP神經網絡描述系統論域的伸縮變化,在系統控制過程中用BP模糊神經網絡計算出當前系統的伸縮因子,同時根據當前系統的誤差利用BP神經網絡的學習能力不斷地對伸縮因子的模糊劃分進行優化。基于BP神經網絡的變論域模糊控制系統的原理如圖4所示。
2.2 系統參數的設計
2.2.1 變論域模糊控制的設計
(1)基本論域的選擇
根據溫室環境控制系統,設誤差基本論域取[-4,+4],誤差變化率的基本論域取[-2,+2],輸出的基本論域取[-1,1]。輸出的控制量U用4個模糊狀態來描述,即PB(正大)、PM(正中)、PS(正小)、ZO(零)即將加熱管道的能量輸入分為 4 個等級,分別為[0,1.6×105,3.2×105,4.8×105]W。
(2)模糊規則的制定
選取控制量的變化的原則是:當誤差大或較大時,選擇控制量以盡快消除誤差為主;而當誤差較小時,選擇控制量要注意防止超調,以保證系統的穩定性為主要出發點。本系統模糊控制規則表如表1所示。

表1 模糊控制規則表
(3)隸屬度函數的選擇
模糊子集隸屬函數的形狀有三角形、梯形或是正態分布等。由于變論域模糊控制對隸屬度函數的選擇要求不高,這里選擇三角形隸屬函數:由3個參數(a,b,c)來表示:
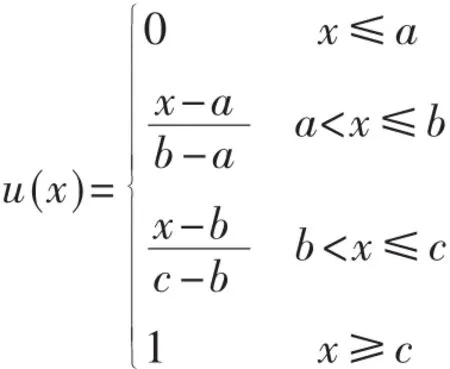
(4)去模糊化
從模糊推理而得到的控制輸出是一個模糊集,它反映了控制語言的模糊性,但實際中對于一個物理對象的控制是唯一確定的。去模糊化的任務是將推理得到的模糊輸出轉換成非模糊值(清晰值),以便形成精確的控制量去控制被控過程。去模糊化的方法有多種,例如最大隸屬度法、重心法(加權平均法)等。采用重心法反模糊控制的計算公式為:
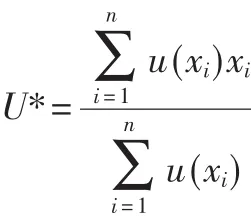
其中,U*為量化清晰值,xi為模糊論域上的離散量,u(xi)為隸屬函數。
2.2.2 BP神經網絡的設計
(1)BP神經網絡結構的設計
BP網絡的輸入、輸出層節點數完全根據使用者的要求來設計。因此,BP神經網絡采用二輸入三輸出的三層結構,即輸入節點數為2,輸出節點數為3。
(2)隱藏層節點的確定
BP神經網絡最主要的特性是具有非線性映射功能。隱含層節點數的選擇是一個十分復雜的問題,沒有很好的解析式來表示。它與求解問題的要求及輸入、輸出節點數的多少都有直接的關系。綜合上述各種因素,確定隱藏層的節點數為7。
(3)學習速率選擇
學習速率的確定是一個非常關鍵的工作,它直接關系到學習的速度及學習成功與否。學習速率決定每一次訓練中所產生的權值變化量。大的學習速率可能導致系統不穩定,但小的學習速率將會導致訓練較長,收斂速度慢。所以一般情況下學習速率的取值范圍在0.01~0.8之間。本文中BP神經網絡的學習速率η為0.4。
(4)動量因子的選取
在BP算法中,為加快收斂速率和防止振蕩,通常都會引入動量因子,以將上次權值的調節量進入當前權值的修改過程,平滑學習路徑。通常動量因子取值的范圍為0~1。本文中動量因子選為-0.1。
(5)期望誤差的選取
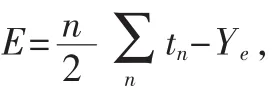
3 系統的流程
溫室系統是一個大滯后、非線性的系統 ,需要不斷地對溫室系統的調控參數進行檢測,調整各個執行設備的開啟時間,從而使得溫室總是保持在作物生長的最佳環境狀態。圖5為系統的流程圖[5]。
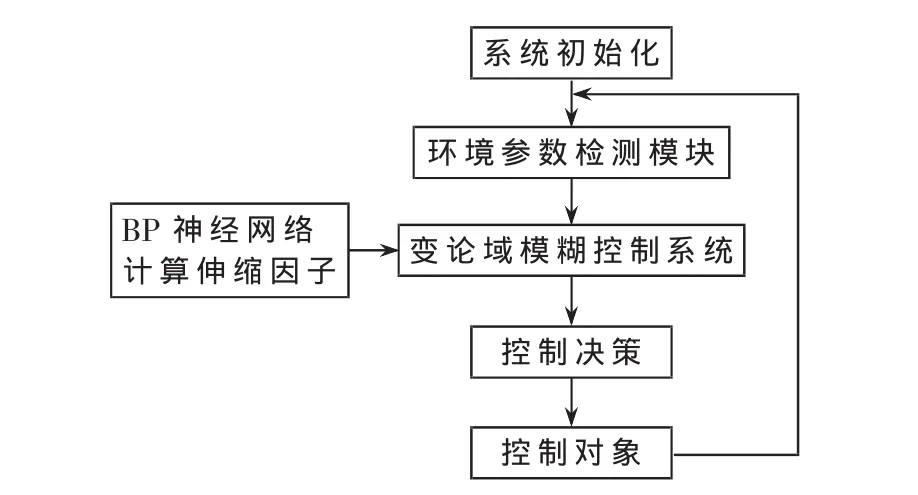
圖5 系統的流程圖
本文詳細介紹了一種基于BP神經網絡的變論域模糊控制的溫室環境控制系統的設計。系統以模糊控制為基本控制方法,用BP神經網絡改進了模糊控制的論域,從而提高溫室環境控制的精度。適合溫室環境控制的多輸入、多輸出和多變量的復雜現象。
[1]李良峰.變論域模糊控制算法的研究[D].成都:電子科技大學,2008:.
[2]李洪興.變論域自適應模糊控制器[J].中國科學,1999,29(l):32-42.
[3]張洪波,陳平,劉學,等.基于神經網絡的專家系統在溫室控制中的應用[J].成都信息工程學院學報,2010,25(3):260-263.
[4]劉增良,劉有才.模糊邏輯與神經網卡(第1版)[M].北京:北京航空航天大學出版社,1996:116-118.
[5]陶然,王樹文,薛圓滿,等.智能化溫室環境控制系統的研究[J].農機化研究,2003(2):53-54.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年11期)2019-01-07 01:28:02