測(cè)深儀在城市河道測(cè)繪中的應(yīng)用
2011-07-30 09:47:56王寧
中國新技術(shù)新產(chǎn)品 2011年20期
王寧
(陜西省水利電力勘測(cè)設(shè)計(jì)研究院,陜西 西安710002)
1 引言
當(dāng)前,城市河道建設(shè)以及河道整治已經(jīng)成為了生態(tài)城市建設(shè)和城市生態(tài)恢復(fù)的一個(gè)重要組成部分。對(duì)城市河道進(jìn)行基礎(chǔ)測(cè)繪,以求產(chǎn)生精確的數(shù)據(jù)與圖紙,能為生態(tài)城市建設(shè)的科學(xué)規(guī)劃和合理開發(fā)提供技術(shù)和數(shù)據(jù)方面的保障。
2 測(cè)深儀的原理
2.1 回聲測(cè)深原理
回聲測(cè)深是一種利用聲波在水中的傳播特性來進(jìn)行水深測(cè)量的技術(shù)。在均勻介質(zhì)中聲波傳播為勻速直線傳播,在不同介面則上會(huì)發(fā)生反射,正是基于此原理,選擇了對(duì)于水的穿透能力最佳并且頻率位于1500Hz附近的超聲波作為從水面垂直向水底進(jìn)行發(fā)射的聲信號(hào),通過從聲波發(fā)射到信號(hào)返回的時(shí)間間隔模擬或直接計(jì)算,來進(jìn)行水體深度的測(cè)定。
2.2 多波束測(cè)深原理
多波束測(cè)深系統(tǒng),正是在回聲測(cè)深儀基礎(chǔ)上所發(fā)展起來的。它能在和航跡垂直的平面內(nèi)一次性測(cè)定上百個(gè)測(cè)深點(diǎn)水深值,從而獲得一條一定寬度的全覆蓋的水深條帶,從而精確快速地測(cè)出沿航線一定寬度范圍內(nèi)水下目標(biāo)的大小、形狀和高低變化,這樣就能比較可靠地描繪出水下地形地貌的精細(xì)特征。
3 測(cè)深技術(shù)要求
3.1 一般規(guī)定
在測(cè)量水深前應(yīng)先檢查平面控制點(diǎn),校對(duì)基準(zhǔn)面和水尺零點(diǎn)或自記水位計(jì)零點(diǎn)的關(guān)系。測(cè)量中應(yīng)采用有模擬記錄的單波束或多波束的回聲測(cè)深儀,在淺水區(qū)測(cè)探宜采用測(cè)深錘或測(cè)深桿。測(cè)深應(yīng)在風(fēng)浪較小時(shí)進(jìn)行。
測(cè)深定位點(diǎn)點(diǎn)位中誤差,應(yīng)該滿足限差要求:測(cè)圖比例>1:5000時(shí),限差不應(yīng)大于圖上 1.5mm;比例≤1:5000時(shí)限差不大于圖上 1.0mm。在忽略平面位移情況下,水深測(cè)量的深度誤差要求:當(dāng)水深 H≤20m,限差±0.2m;當(dāng)水深 H>20m,限差±0.01h。
航道測(cè)量中要按照內(nèi)河、沿海的實(shí)際需要及水深變化進(jìn)行基本測(cè)量和檢查測(cè)量或維護(hù)性測(cè)量。對(duì)沿海航道來說,基本測(cè)量周期3~8年,內(nèi)河航道則為10~15年。對(duì)于測(cè)區(qū)內(nèi)有變化的沿海航道以及港區(qū)應(yīng)定期進(jìn)行航道檢查測(cè)量。檢測(cè)周期按年、季、月、旬進(jìn)行劃分,內(nèi)河維護(hù)性測(cè)量則應(yīng)按照航道的實(shí)際變化進(jìn)行。
航道的基本測(cè)量要充分利用已有測(cè)量成果,而控制網(wǎng)和地形則應(yīng)按實(shí)際變化進(jìn)行復(fù)測(cè)、局部修測(cè)或補(bǔ)測(cè),然后提交完整的控制點(diǎn)成果及地形資料。航道檢查測(cè)量或維護(hù)性測(cè)量則要按照實(shí)際情況確定測(cè)量?jī)?nèi)容。
3.2 測(cè)深線布設(shè)
主測(cè)深線應(yīng)垂直于等深線總方向、挖槽軸線或岸線進(jìn)行布設(shè),亦可布設(shè)成平行線、螺旋線或者 45°的斜線。測(cè)深線間距:內(nèi)河重點(diǎn)水域,圖上10~15mm;內(nèi)河一般水域 15~20mm;沿海地區(qū),10mm。測(cè)深檢查線應(yīng)與主測(cè)深線垂直,其長(zhǎng)度不小于主測(cè)深線總長(zhǎng)度的 5%。而不同測(cè)深組測(cè)深的相鄰測(cè)段還要有一條重合測(cè)深線;在同一測(cè)深組不同時(shí)期測(cè)深的相鄰測(cè)深段還要布設(shè)兩條重合的測(cè)深線。
3.3 定位
測(cè)深定位點(diǎn)間距按項(xiàng)目類型和儀具類型要符合圖上的最大間距要求。定位中心和測(cè)深中心應(yīng)一致,偏差不大于圖上0.3mm,若超限則進(jìn)行歸心改正。GPS定位,水深測(cè)量開始之前應(yīng)在高級(jí)點(diǎn)上對(duì)差分 GPS接收機(jī)進(jìn)行檢驗(yàn)及比對(duì),比對(duì)時(shí)間不少于 1h。通過 DGPS定位系統(tǒng)所測(cè)得的 WGS-84坐標(biāo),需轉(zhuǎn)換成測(cè)圖或施工所用的坐標(biāo),而且要滿足定位精度的要求。
3.4 測(cè)深
測(cè)深進(jìn)行前測(cè)量船應(yīng)和水位站及定位觀測(cè)站進(jìn)行校對(duì)時(shí)間。水位觀測(cè)應(yīng)在測(cè)前10min開始,在測(cè)后 10min結(jié)束。測(cè)深儀要進(jìn)行定期檢驗(yàn)。每次測(cè)深前、后應(yīng)對(duì)測(cè)深儀進(jìn)行現(xiàn)場(chǎng)比對(duì)。采用的檢查手段有聲速儀、水聽儀、檢查板等技術(shù)性手段以及水文資料計(jì)算深度改正數(shù)等經(jīng)驗(yàn)性手段。
4 測(cè)深關(guān)鍵誤差分析
為獲得提高城市河道測(cè)繪工程質(zhì)量的方法,要先進(jìn)行關(guān)鍵環(huán)節(jié)質(zhì)量影響因素(誤差)分析,當(dāng)找出所有影響項(xiàng)目實(shí)施質(zhì)量的因素之后,進(jìn)行其中的關(guān)鍵因素分析,并制定相應(yīng)改進(jìn)措施。
城市河道的測(cè)繪誤差主要來源于以下三方面:
1)測(cè)量?jī)x器:每一種儀器只具有一定限度的準(zhǔn)確度從而必須帶來誤差。
2)觀測(cè)者:考慮到觀測(cè)者的感官鑒別能力有一定的局限性,在儀器的操作過程中也可能產(chǎn)生誤差,同時(shí)還有觀測(cè)者的技術(shù)水平、工作態(tài)度的因素。
3)外界條件:測(cè)量中溫度、濕度、風(fēng)力、大氣、鹽度等因素和變化均對(duì)觀測(cè)數(shù)據(jù)會(huì)有直接影響。尤其是高精度測(cè)量,更要重視外界條件產(chǎn)生的誤差。目前河道測(cè)量誤差來源列表如表4-1所示:
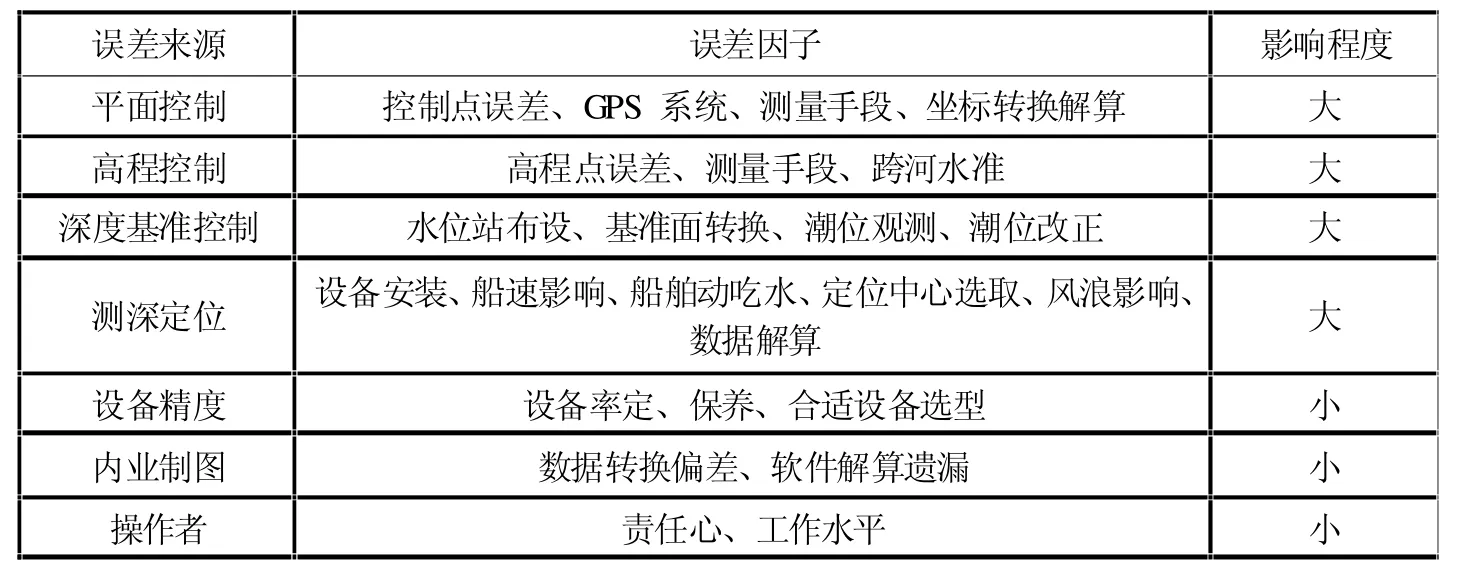
表4-1 誤差來源列表
5.某江段測(cè)量實(shí)例
本文進(jìn)行了某江段的實(shí)測(cè)工作,基本步驟如下:
1)測(cè)深線布設(shè):
主航道測(cè)深線間距 100m,總計(jì) 372條;重點(diǎn)區(qū)域內(nèi)采取加密測(cè)量,測(cè)深線間距50m,內(nèi)插 37條;在港口處布設(shè)一條,向內(nèi)測(cè)深線的間距為 50m,至港內(nèi)第一座橋外側(cè)一條共計(jì) 12條。在平行于航道中心線的方向布設(shè)一條檢查線,其長(zhǎng)度約 37km,用以檢查測(cè)量成果準(zhǔn)確性。
2)測(cè)前儀器比對(duì):
所有測(cè)量設(shè)備都具有合格的計(jì)量證書,均按規(guī)范要求定期進(jìn)行率定,從而確保了測(cè)量設(shè)備在正常使用期內(nèi)投入本次工作。在水深測(cè)量之前,對(duì)所使用的 GPS和測(cè)深儀進(jìn)行檢校以及嚴(yán)格的校準(zhǔn)、比對(duì)。
a)水深測(cè)量定位 GPS的比對(duì)
將城市城建坐標(biāo)轉(zhuǎn)換參數(shù)輸入 HYPACK MAX水道測(cè)量程序,在已知的平面控制點(diǎn) G3310、G3173上精確架設(shè) GPS接收機(jī),然后在RTK-DGPS鎖定狀態(tài)下進(jìn)行坐標(biāo)數(shù)據(jù)采集,取其平均值和該點(diǎn)已知理論坐標(biāo)值進(jìn)行比對(duì);最大位置誤差小于30cm,平面定位精度滿足規(guī)范要求。
b)測(cè)深儀比對(duì)
測(cè)深前后在測(cè)區(qū)內(nèi)對(duì)測(cè)深儀現(xiàn)場(chǎng)比對(duì),比對(duì)方法采用校正板進(jìn)行,首先對(duì)校正板的深度繩用鋼卷尺進(jìn)行精確校準(zhǔn),然后在測(cè)區(qū)附近選擇水面較平靜,同時(shí)流速較小,并且測(cè)深儀處于正常工作狀態(tài)時(shí)進(jìn)行校對(duì),每 2m 一個(gè)臺(tái)階,誤差小于0.03m。在測(cè)深之前,校對(duì)驗(yàn)潮時(shí)間和 HYPACK軟件的時(shí)間,確認(rèn)一致后進(jìn)行測(cè)量。經(jīng)過比對(duì)校準(zhǔn),保證水深測(cè)量的測(cè)深精度滿足規(guī)范要求。
3)測(cè)量方法:
采用 SDH-13D回聲測(cè)深儀進(jìn)行測(cè)深,采用 RTK-DGPS、VRS方法進(jìn)行平面定位,專用水道測(cè)量軟件 HYPACK MAX完成水深及定位點(diǎn)數(shù)據(jù)采集。由于江段碼頭作業(yè)區(qū)船舶眾多并且兩岸灘地過淺,測(cè)量斷面兩端無法一次測(cè)足,為此,測(cè)量組通過在測(cè)量小艇上安裝 GPS接收機(jī)或采用導(dǎo)標(biāo)距離法完成定位,在高潮位時(shí)進(jìn)行兩岸淺灘的測(cè)量,碼頭前沿水深則用測(cè)深錘測(cè)量。
4)驗(yàn)潮及水位改正:
采用人工方式進(jìn)行驗(yàn)潮,即在驗(yàn)潮站采用皮尺人工量取,每十分鐘記錄一次,精確至 0.01m。水位改正則按單站改正,改正的區(qū)域劃分按照?qǐng)D幅來確定。
6.結(jié)論
本文旨在通過分析城市河道測(cè)繪工程中測(cè)深儀的原理,測(cè)深技術(shù)的要求以及對(duì)測(cè)深關(guān)鍵誤差的分析,獲得改進(jìn)城市河道測(cè)繪工程工藝、流程的優(yōu)化方法,從而為科學(xué)規(guī)劃、合理開發(fā)河道建設(shè)提供精確技術(shù)及數(shù)據(jù)保障。
[1]]袁世中.現(xiàn)代測(cè)繪 GPS技術(shù)在疏浚工程中的應(yīng)用.上海測(cè)繪,2004(1):6~11.
[2]]張正祿.工程測(cè)量學(xué).武漢:武漢大學(xué)出版社,2002.
[3]]黃茂華.GPS概述及其應(yīng)用.上海測(cè)繪,2004(3):46~50.
[4]]李家彪.多波束勘測(cè)原理技術(shù)與方法.北京:海洋出版社,1999.
[5]侯世喜,黃漠濤,陽永忠等.多波束數(shù)據(jù)處理軟件的應(yīng)用與啟示.海洋測(cè)繪,2003(6).
猜你喜歡
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發(fā)展導(dǎo)向(2019年10期)2019-08-24 06:25:28
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
江西建材(2018年4期)2018-04-10 12:37:38
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
