基于GPS的虛擬應(yīng)答器在調(diào)車(chē)監(jiān)控系統(tǒng)中的應(yīng)用
2011-07-30 08:10:06梁前浩
鐵道通信信號(hào) 2011年10期
關(guān)鍵詞:系統(tǒng)
梁前浩 薛 峰
*卡斯柯信號(hào)有限公司 工程師,100044 北京
隨著鐵路列車(chē)運(yùn)行速度的提高和運(yùn)能需求的增加,調(diào)車(chē)作業(yè)的安全問(wèn)題越來(lái)越引起關(guān)注。調(diào)車(chē)作業(yè)的安全防護(hù)不僅關(guān)系著列車(chē)運(yùn)行的安全,而且直接影響列車(chē)編組計(jì)劃的執(zhí)行、列車(chē)運(yùn)行圖的實(shí)現(xiàn)、以及車(chē)輛周轉(zhuǎn)等。目前,用于調(diào)車(chē)作業(yè)安全防護(hù)的無(wú)線(xiàn)調(diào)車(chē)機(jī)車(chē)信號(hào)和監(jiān)控系統(tǒng),都采用應(yīng)答器作為定位設(shè)備。這需要改造站場(chǎng),在調(diào)車(chē)作業(yè)站場(chǎng)大量鋪設(shè)地面無(wú)源應(yīng)答器。由于應(yīng)答器設(shè)備成本較高,且需要專(zhuān)人定期維護(hù),應(yīng)答器的大量使用無(wú)疑增加了系統(tǒng)的建設(shè)及維護(hù)成本,并且給管理維護(hù)人員帶來(lái)額外負(fù)擔(dān)。
近年來(lái),隨著衛(wèi)星導(dǎo)航技術(shù)的不斷發(fā)展,其導(dǎo)航定位精度、可用性都大大提高。以GPS系統(tǒng)為例,GPS衛(wèi)星的現(xiàn)代化和新型GPS衛(wèi)星的運(yùn)行,其在軌運(yùn)行的衛(wèi)星數(shù)也由24顆增加到32顆,每個(gè)軌道面有高達(dá)5~6顆衛(wèi)星,它們沿平面不均勻分布,可提供冗余的覆蓋,從而提高了定位精度和星座魯棒性。此外,GPS衛(wèi)星性能大幅提高,目前即使不使用差分技術(shù),GPS的定位精度也能達(dá)到3 m(95%)。若采用差分技術(shù),GPS的定位精度將進(jìn)一步提高。
1 系統(tǒng)原理
采用虛擬應(yīng)答器方案的調(diào)車(chē)監(jiān)控系統(tǒng)模擬了地面無(wú)源應(yīng)答器的定位方式。虛擬應(yīng)答器對(duì)于調(diào)車(chē)監(jiān)控系統(tǒng)車(chē)載主機(jī)來(lái)說(shuō)是一個(gè)外部設(shè)備,它模擬安裝在機(jī)車(chē)上的應(yīng)答器設(shè)備以及安裝在軌道上的無(wú)源應(yīng)答器。當(dāng)調(diào)車(chē)機(jī)運(yùn)行到軌道上預(yù)先設(shè)定的虛擬應(yīng)答器數(shù)據(jù)點(diǎn)并且GPS工作正常時(shí),虛擬應(yīng)答器就向車(chē)載主機(jī)發(fā)送一個(gè)應(yīng)答器數(shù)據(jù)包,這個(gè)數(shù)據(jù)包與實(shí)際應(yīng)答器查詢(xún)主機(jī)發(fā)送的數(shù)據(jù)包相同,車(chē)載設(shè)備通過(guò)虛擬應(yīng)答器信息確定位置。
系統(tǒng)設(shè)計(jì)中采用組建局域差分增強(qiáng)系統(tǒng)的方式提高GPS定位精度。局域差分系統(tǒng)由地面基準(zhǔn)站、數(shù)據(jù)播發(fā)鏈路和車(chē)載部分組成。根據(jù)對(duì)精度的不同要求,可選用碼差分和載波相位差分等不同差分增強(qiáng)方案:碼差分精度可達(dá)到亞米級(jí),載波相位差分精度可達(dá)到厘米級(jí)。局域差分增強(qiáng)系統(tǒng)原理如圖1所示。
地面基站:在已知坐標(biāo)的固定點(diǎn)上架設(shè)基準(zhǔn)站,基準(zhǔn)站連續(xù)跟蹤觀測(cè)GPS衛(wèi)星,利用已知測(cè)量位置對(duì)誤差進(jìn)行估計(jì)產(chǎn)生RTCM修正數(shù),并把校正信息通過(guò)數(shù)據(jù)鏈路發(fā)送給車(chē)載設(shè)備。
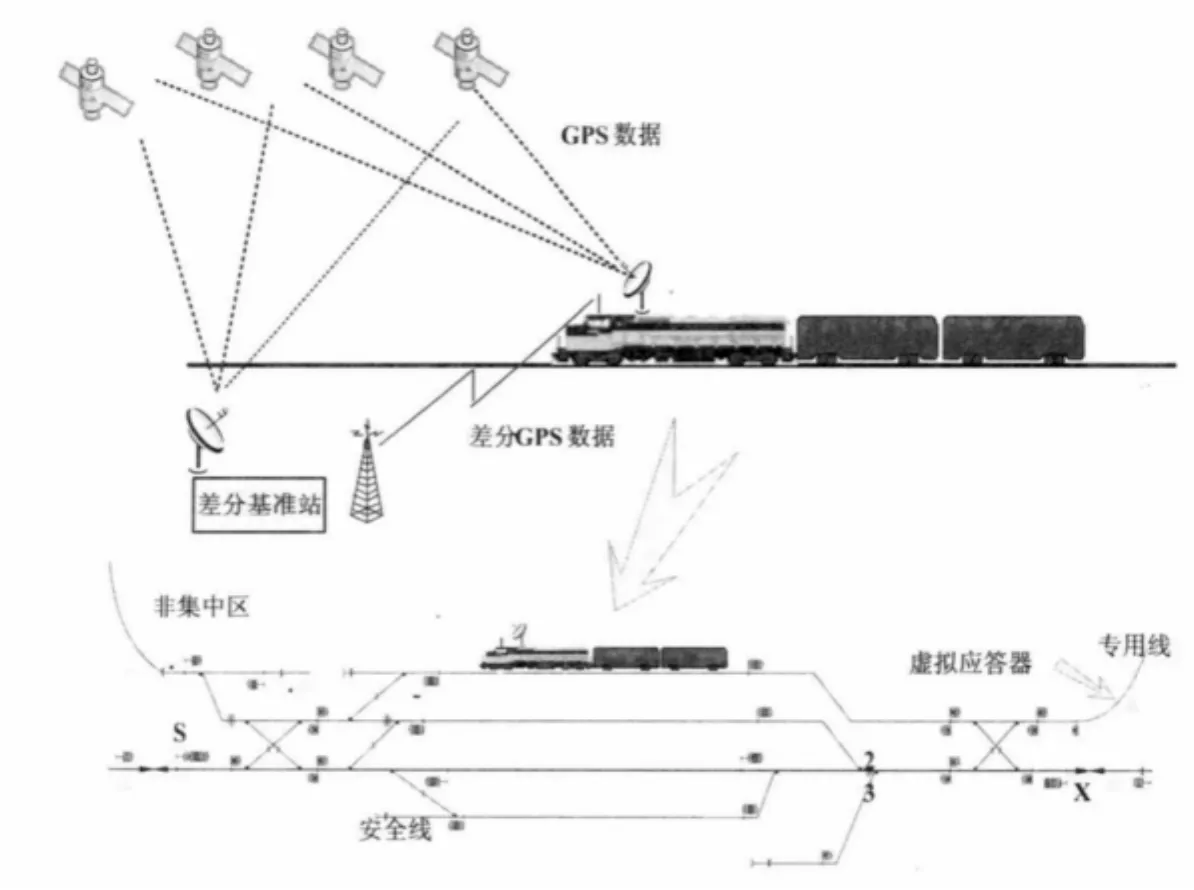
圖1 調(diào)車(chē)監(jiān)控系統(tǒng)局域差分系統(tǒng)原理
數(shù)據(jù)播發(fā)鏈路:系統(tǒng)復(fù)用調(diào)車(chē)監(jiān)控系統(tǒng)中既有的車(chē)-地?cái)?shù)傳電臺(tái)通道播發(fā)差分修正數(shù)據(jù)。
車(chē)載部分:車(chē)載主機(jī)接收由地面基站發(fā)送過(guò)來(lái)的差分?jǐn)?shù)據(jù)并轉(zhuǎn)發(fā)給虛擬應(yīng)答器定位模塊,GPS接收機(jī)利用差分?jǐn)?shù)據(jù)對(duì)自己的定位數(shù)據(jù)進(jìn)行修正解算,提高定位精度。
單一基站提供的修正信息的有效范圍為10~100 km,足以覆蓋車(chē)站調(diào)車(chē)作業(yè)范圍。
2 虛擬應(yīng)答器設(shè)計(jì)
2.1 虛擬應(yīng)答器結(jié)構(gòu)
虛擬應(yīng)答器采用模塊化結(jié)構(gòu),這種模塊化結(jié)構(gòu)可以實(shí)現(xiàn)結(jié)構(gòu)和功能分離。虛擬應(yīng)答器包括:定位模塊、安全判別模塊、報(bào)文處理模塊以及通信模塊。虛擬應(yīng)答器結(jié)構(gòu)如圖2。
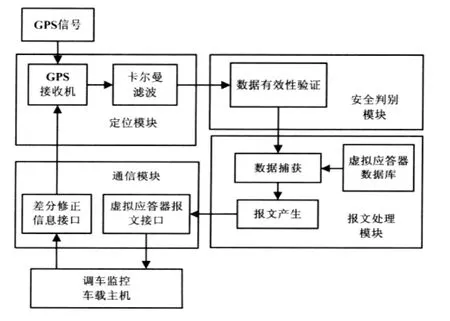
圖2 調(diào)車(chē)監(jiān)控系統(tǒng)虛擬應(yīng)答器結(jié)構(gòu)圖
1.定位模塊。定位模塊接收GPS信號(hào)和差分修正信息,實(shí)時(shí)計(jì)算定位數(shù)據(jù),并對(duì)數(shù)據(jù)進(jìn)行卡爾曼濾波處理。定位數(shù)據(jù)經(jīng)卡爾曼濾波后傳遞給安全判別模塊。模塊化的設(shè)計(jì)可根據(jù)不同的應(yīng)用環(huán)境、技術(shù)指標(biāo),選擇不同的接收機(jī)。
2.安全判別模塊。安全判別模塊對(duì)定位數(shù)據(jù)的精度進(jìn)行估計(jì),對(duì)于不滿(mǎn)足系統(tǒng)精度要求的定位數(shù)據(jù),認(rèn)為是無(wú)效數(shù)據(jù),予以剔除,從而保證定位數(shù)據(jù)的精度滿(mǎn)足設(shè)計(jì)指標(biāo)。有效的定位數(shù)據(jù)可將定位信息傳遞給報(bào)文處理模塊。
3.報(bào)文處理模塊。報(bào)文處理模塊根據(jù)設(shè)計(jì)的數(shù)據(jù)捕獲規(guī)則對(duì)定位數(shù)據(jù)進(jìn)行處理,判定是否為壓中虛擬應(yīng)答器。此模塊實(shí)時(shí)生成設(shè)備狀態(tài)報(bào)文,如果壓中虛擬應(yīng)答器,則提取相關(guān)虛擬應(yīng)答器信息,生成應(yīng)答器數(shù)據(jù)報(bào)文。
數(shù)據(jù)校驗(yàn)規(guī)則根據(jù)不同的應(yīng)用環(huán)境來(lái)設(shè)置“組校驗(yàn)方式”、“區(qū)域校驗(yàn)方式”,保證輸出信息的可靠性和安全性。定位數(shù)據(jù)捕獲設(shè)計(jì)為當(dāng)數(shù)據(jù)滿(mǎn)足設(shè)定的捕獲判決后,在距離當(dāng)前虛擬應(yīng)答器點(diǎn)最近的地方,捕獲前方虛擬應(yīng)答器信息。
數(shù)據(jù)報(bào)文生成格式根據(jù)虛擬應(yīng)答器數(shù)據(jù)庫(kù)和報(bào)文產(chǎn)生規(guī)則進(jìn)行設(shè)置,格式完全符合現(xiàn)有應(yīng)答器報(bào)文標(biāo)準(zhǔn)。
4.通信模塊。通信模塊通過(guò)串口與車(chē)載主機(jī)連接,一方面接收車(chē)載主機(jī)轉(zhuǎn)發(fā)的差分修正信息,并將其提供給定位模塊的GPS接收機(jī);另一方面向車(chē)載主機(jī)發(fā)送應(yīng)答器數(shù)據(jù)包。通信模塊每200 ms發(fā)送一次設(shè)備狀態(tài)數(shù)據(jù),當(dāng)壓過(guò)虛擬應(yīng)答器時(shí),向車(chē)載發(fā)送應(yīng)答器數(shù)據(jù)報(bào)文。
2.2 軟件流程
調(diào)車(chē)監(jiān)控系統(tǒng)虛擬應(yīng)答器軟件流程圖見(jiàn)圖3。
3 定位精度
GPS水平定位精度可表示為水平精度因子和偽距誤差因子之積。偽距誤差因子取決于偽距和載波相位測(cè)量值以及廣播導(dǎo)航數(shù)據(jù)的質(zhì)量,其等效誤差可以近似表示為均值為零的高斯隨機(jī)變量,其方差由每個(gè)分量差之和來(lái)確定,采用距離均方根 (DRMS)描述。因此GPS水平定位精度可用以下公式來(lái)表示:
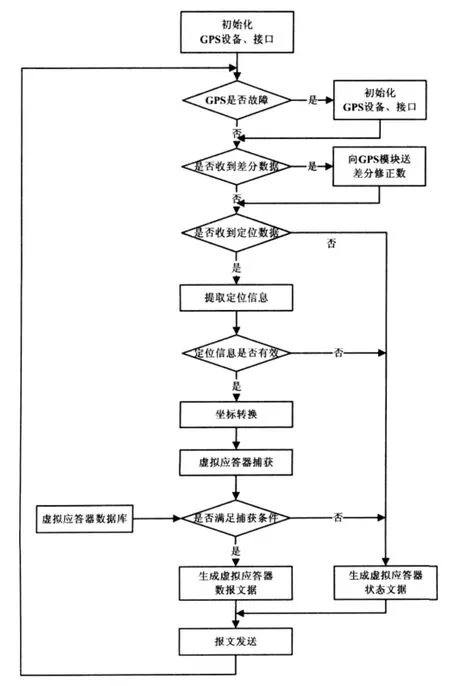
圖3 調(diào)車(chē)監(jiān)控系統(tǒng)虛擬應(yīng)答器流程圖

其中:HDOP是水平精度因子,表示衛(wèi)星/用戶(hù)的相對(duì)布局對(duì)誤差的影響;σURE是偽距誤差因子。
選取全球平均HDOP=1.0,單點(diǎn)測(cè)量的偽距誤差估計(jì)σURE=0.36 m,差分測(cè)量的偽距誤差估計(jì)σURE=1.4 m。單點(diǎn)、偽距差分水平定位精度估計(jì)如表1。
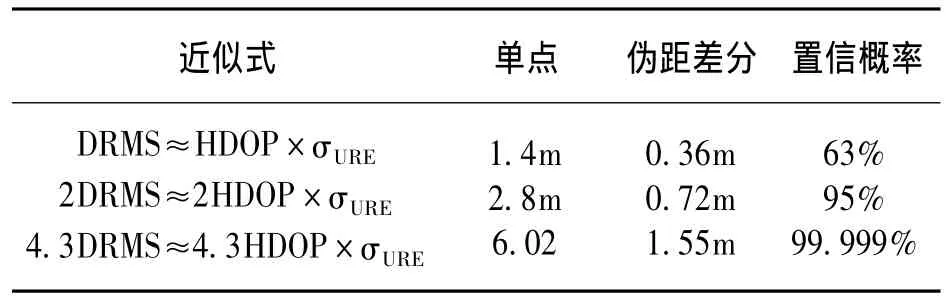
表1 單點(diǎn)、偽距差分水平定位精度估計(jì)
選用單頻GPS接收機(jī)進(jìn)行單點(diǎn)定位靜態(tài)12h實(shí)驗(yàn),偽距差分靜態(tài)定位12h實(shí)驗(yàn)。實(shí)驗(yàn)結(jié)果見(jiàn)表2。
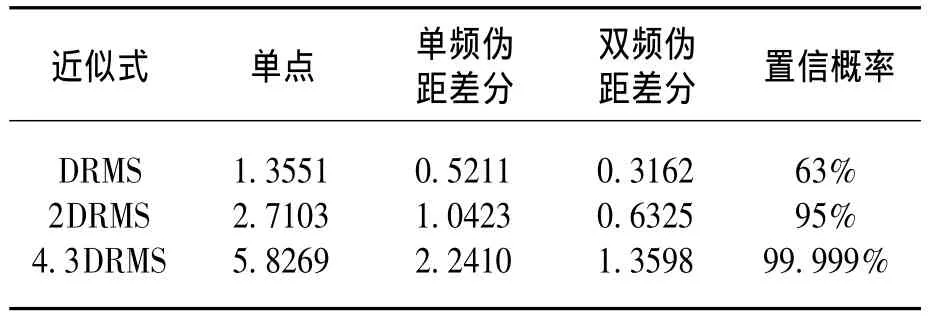
表2 單點(diǎn)、偽距差分定位精度實(shí)驗(yàn)結(jié)果
從定位實(shí)驗(yàn)的結(jié)果來(lái)看,通過(guò)組建局域差分增強(qiáng)系統(tǒng),GPS定位精度得到有效提高,實(shí)驗(yàn)結(jié)果也符合單點(diǎn)、偽距差分水平精度估計(jì)。根據(jù)鐵路技術(shù)管理規(guī)程的規(guī)定:客貨共線(xiàn)鐵路站內(nèi)鐵路線(xiàn)間距應(yīng)大于4.6 m,也就是說(shuō)單頻GPS偽距差分定位精度:2.2410 m,99.999%,滿(mǎn)足定位精度要求 (<2.3m,99.999%)。雙頻GPS偽距差分定位精度優(yōu)于系統(tǒng)定位精度要求。在具體實(shí)施過(guò)程中可以根據(jù)現(xiàn)場(chǎng)實(shí)際情況選配不同特性的定位設(shè)備以滿(mǎn)足現(xiàn)場(chǎng)的特定需求。
4 結(jié)束語(yǔ)
在調(diào)車(chē)監(jiān)控系統(tǒng)中,車(chē)列初始定位及位置跟蹤技術(shù)的選擇直接決定了系統(tǒng)對(duì)調(diào)車(chē)作業(yè)的安全監(jiān)控水平,利用衛(wèi)星導(dǎo)航技術(shù)實(shí)現(xiàn)的虛擬應(yīng)答器定位方案代替目前普遍采用的無(wú)源應(yīng)答器方案,在降低系統(tǒng)建設(shè)和維護(hù)成本的同時(shí),進(jìn)一步提高了系統(tǒng)的控制精度、拓寬了系統(tǒng)的應(yīng)用范圍,對(duì)調(diào)車(chē)監(jiān)控系統(tǒng)的推廣和應(yīng)用有著積極的意義。
虛擬應(yīng)答器方案已在多個(gè)車(chē)站投入了實(shí)際應(yīng)用,效果良好,深受用戶(hù)歡迎。
[1]鐵道部.無(wú)線(xiàn)調(diào)車(chē)機(jī)車(chē)信號(hào)和監(jiān)控系統(tǒng)技術(shù)條件(暫行).2004.
[2]Elliott D.Kaplan and Christopher J.Hegarty.寇艷紅譯.GPS原理與應(yīng)用[M].第二版.北京:電子工業(yè)出版社,2007:224-345.
[3]張雅靜,王劍,蔡伯根.基于GNSS的虛擬應(yīng)答器研究[J].鐵道學(xué)報(bào),2008,30(1).
[4]劉基余.GPS衛(wèi)星導(dǎo)航定位原理與方法[M].北京:科學(xué)出版社,2003.
[5]張夫松,宋宇博.GPS在機(jī)車(chē)調(diào)車(chē)監(jiān)控系統(tǒng)中的應(yīng)用研究[J].蘭州交通大學(xué)學(xué)報(bào),2004,23(4).
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
