粒子群算法在電動機辨識中的應用及研究
2011-08-02 08:13:36鄧云天
上海電氣技術 2011年4期
關鍵詞:研究
鄧云天, 齊 亮
(1.上海電氣集團股份有限公司 上海電機廠有限公司,上海200240;2.上海電氣集團股份有限公司中央研究院,上海200070)
在現代交流變頻調速技術中,電動機參數辨識有著重要的工程價值,故受到人們長期而廣泛的關注。電動機參數辨識的工程價值主要體現在:①電動機控制方面,無論是電動機矢量控制,還是無傳感器直接轉矩控制都依賴于電動機參數,尤其是在精確轉矩控制的應用領域,考慮交流電動機參數變化會引起一定的轉矩脈動和誤差,為了改善系統的性能,電動機參數需得到辨識;② 故障診斷方面,通過電動機參數辨識進行機電設備的故障診斷,如通過辨識異步電動機穩態參數監測轉子電阻變化,以實現轉子斷條的診斷等。
在電動機參數辨識方面常用的辨識方法有最小二乘法[1-2]、卡爾曼濾波法[3-4]、信號激勵法[5]和模型參考自適應法[6-7]等。通過應用這些算法能夠一定程度地解決電動機參數辨識的問題,但這些方法在電動機辨識中也存在著缺點和不足,即辨識精度低、收斂速度慢和魯棒性差等。隨著處理器處理能力的發展,近年國內外許多專家、學者將智能優化算法,如遺傳算法和粒子群算法(Particle Swarm Optimization,PSO)等引入到電動機參數辨識中,提出了許多基于智能優化算法的電動機參數辨識算法,在電動機辨識中取得很好的效果。其中,由于粒子群算法收斂速度快、編程簡單等特點,近來在電動機辨識領域的應用引起了人們關注。本文主要介紹了粒子群算法在電動機參數辨識領域的應用發展狀況及趨勢。
1 粒子群算法電動機參數辨識原理
PSO是屬于進化計算的1個分支,是1995年由Kennedy和Eberhan在研究鳥類和魚類的群體行為基礎上提出的1種智能算法。它的實質是1種基于迭代的優化工具,即將計算系統在初始化階段隨機設定1組解,然后再通過迭代計算實現對最優值求解。粒子群算法作為1種智能算法本身具有非常大的優點:① 原理和機制簡單,即在計算求解過程中所需更新變量少,只需更新速度和位置信息,無需其他信息;② 計算過程便于實現,求解效率高,可調參數少,易于應用。
1.1 基本粒子群算法
1.1.1 PSO思想
該算法是基于群體智能理論的優化算法,是由提出者根據對鳥類的群體行為進行建模與仿真結果啟示而設計的。設想的場景:一群鳥在每個區域內隨機搜索食物,并且在該區域中只有1塊食物,所有的鳥都不知道食物在哪里,但它們知道當前距離食物最近的鳥的位置。于是,鳥找到食物的最優策略就是搜尋當前距離食物最近的鳥所在的周圍區域。在對最優解求解過程中,將所要求解的優化問題當作是n維搜索空間上的1個點,通常稱作“粒子”,并且假設其既沒有體積,也沒有質量。這種粒子都有著決定粒子本身位置和方向的速度和適應度值,其適應度值是由目標函數所決定的。在迭代計算過程中,粒子通過不斷跟蹤2個“極值”來實現對自身的更新,并直到最終求解所要的最優解。所謂2個極值,其中1個是粒子本身所找到的最優解,即個體極值;另1個極值是種群當前所找到的最優解,即全局極值。
1.1.2 PSO數學表達
設所要搜索的空間為D維,其總粒子數為n。第i個粒子位置向量表示為

第i個粒子演進中的過去最優位置表示為

其中,第g個粒子的演進中過去最優位置Pg為所有Pi(i=1,2,…,n)中的最優值;第i個粒子的位置的速度向量表示為

每個粒子的位置按照如下公式進行更新演進:
式中,w為慣性因子,當w較大時適于對解空間進行大范圍探查,當w較小時適于進行小范圍開挖;C1,C2為加速因子,其值是正常數;rand()為[0,1]之間的隨機數;第d維的位置變化范圍為[-XMAXd,XMAXd],速度變化范圍為[-VMAXd,VMAXd],迭代中如果位置和速度超過邊界范圍則用邊界值代替。根據式(1)和式(2)可以實現對問題最優解的尋找。
1.2 基于PSO電動機辨識原理
基于PSO的電動機辨識原理,如圖1所示。
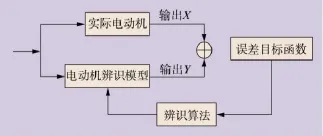
圖1 電動機參數辨識系統原理框圖
電動機參數辨識問題實際上就是通過適當選取電動機參考數學模型中未知參數,使測量信號誤差函數值達到極小值的問題,其辨識最佳參數應該使電動機辨識模型的離散輸出預報值與實際電動機輸出值誤差最小。通過將誤差相關量構建成為目標函數,以PSO找出目標函數最優解,從而實現對電動機參數的辨識。
2 算法應用進展
PSO應用于電動機參數辨識始于21世紀初,目前國內外學者圍繞PSO在電動機辨識方面的應用開展了大量工作,已經取得一定成果。
2.1 基于基本PSO電動機參數辨識
采用基本PSO實現電動機參數辨識的研究國內最早出現在2003年。文獻[8]中針對粒子群算法特點,提出了1種同步發電動機參數辨識的計算框架,并通過算例表明這種參數辨識算法無需提取電動機數學模型,可直接利用穩定計算程序,簡單實用、具有可行性。文獻[9]中提出了1種用于交流感應電動機辨識的微粒群優化算法(Particle Swarm Optimization Algorithm,PSOA)的電動機參數辨識方法。該辨識機理主要是通過對交流電動機實際輸出值與電動機數學模型輸出值進行比較,并不斷修正其差值,從而實現交流感應電動機參數辨識。作者還詳細介紹了交流感應電動機的數學模型,說明了PSOA的運行機理與特征,并以實驗證明了該方法的可行性和辨識結果的可信性。采用基本PSO實現電動機參數辨識研究,為PSO應用領域延伸起到了很好的作用,為改進PSO和以PSO為基礎的混合算法等在電動機參數辨識方面應用起到很好的促進作用。
2.2 基于改進PSO電動機參數辨識
基于改進的PSO在電動機參數辨識領域研究主要是針對傳統基本PSO不足而進行改進的,從而提高電動機參數辨識算法精度、可靠性。
文獻[10]中考慮標準PSO收斂過程存在早熟問題,提出1種基于天體系統模型的PSO。所謂的天體系統模型的PSO就是將族群依據天文學中天體系統模型分成多個天體系統,這些天體系統相互獨立,按照自身運行規則在各自空間中運行,并在運算后期引入混沌因子以優化計算結果,從而得到全局最優解。利用該算法對交流感應電動機參數進行辨識仿真試驗研究。通過對其仿真結果分析可知,該算法相對于遺傳算法和基本PSO對交流感應電動機參數辨識具有更高的辨識精度。
文獻[11]中提出了1種雙粒子群結構的電動機參數辨識算法,并對異步感應電動機進行了參數辨識驗證研究,很好地提高了電動機參數辨識精度,減小了電動機參數辨識誤差。
文獻[12]中提出了1種PSO與收縮因子算法用于確定1個異步電動機的參數。使用的變量是測量的定子電流和電壓,以估算電氣和機械參數,并通過仿真與最小二乘法得到的數據進行了比較,所得到辨識結果比較符合實際參數。
文獻[13]中將遺傳算法、PSO和壓縮因子PSO都應用于異步感應電動機參數辨識,通過試驗驗證3種算法都能獲得理想的電動機參數。但綜合考慮輸出變量誤差、計算步驟等方面,可知PSO優于其他2種算法。
文獻[14]中提出了1種C-POS算法用于異步感應電動機參數辨識。C-POS算法就是建立1個如進行社交與集會的俱樂部,每個粒子都可以加入很多個俱樂部,俱樂部中可以容納大量粒子,空的俱樂部也是允許的。通過對電動機參數辨識仿真測試,該算法的收斂速度明顯優于傳統POS算法和遺傳算法。
在改進PSO電動機辨識方面應用的研究雖然很多,但主要側重于PSO改進研究,其在電動機參數辨識領域的實際工程應用還有待進一步研究。
2.3 混合算法電動機參數辨識
以PSO為基礎結合其他算法來設計電動機參數辨識混合算法可以彌補各自算法的不足,有利于提高電動機參數辨識精度,提高辨識可靠性。
文獻[15]中將最小二乘法和擴展PSO相結合提出混合算法,該算法首先利用PSO對發電機參數進行初步計算,然后將所得到的最優值作為最小二乘法的迭代初值而算出最終的發電機參數;因此,充分發揮了各自算法的特點,取得了很好的計算成果。
目前,PSO與其他算法結合設計電動機參數辨識的方法還不是很多,但該方向具有很大的發展潛力,是以PSO為基礎實現電動機參數辨識有效、有前途的發展方向。
2.4 基于PSO電動機參數在線辨識
電動機在運行的時候,參數不是恒定的,參數會隨著電動機溫度的變化而有所改變,在線辨識是為了解決參數變化問題。對電動機參數進行在線辨識,然后對控制系統中的參數進行校對。電動機參數在線辨識對辨識算法的實時性要求較高,最近也有學者將PSO引入到電動機參數在線辨識中。文獻[16]中用PSO應用于永磁同步電動機參數在線辨識,并進行了計算仿真和在線實時仿真研究,為電動機參數在線辨識開辟了1條新的實現途徑。
目前,該方面研究主要集中于PSO應用于電動機參數辨識的可行性論證研究,大部分文獻以仿真驗證其可行性,在工程應用較少。另外,PSO應用于電動機參數辨識主要集中于感應電動機,對永磁同步電動機及永磁同步電動機非線性參數辨識基本沒有研究。
3 結 語
PSO由于其生物機制清晰、編程易于實現、運行效率高等優點,在電動機參數辨識領域研究已經越來越受到人們的重視,并且發展很快。其研究發展主要趨于如下特點:
(1)粒子群算法與其他算法結合實現電動機參數辨識將是主要發展方向,PSO盡管有許多特點,但也有著易于早熟等問題。在電動機參數辨識精度高的要求下很難滿足要求,與其他算法結合發揮各自優勢,可以提高電動機參數辨識進度。
(2)PSO用于電動機參數辨識將向工程應用發展,目前PSO應用于電動機參數辨識的研究主要還是仿真驗證為主,工程應用少。
(3)PSO用于電動機參數辨識主要是以離線電動機參數辨識為主,在線電動機參數辨識研究有待深入研究。
盡管PSO在電動機參數辨識領域的應用只是最近幾年發展起來的,但憑借PSO本身所具有的先天優勢,一定會在電動機參數辨識領域取得很好的應用與發展。
[1] Cirricione M,Pucci M,Cirrioncione G,et al.A new experimental application of least-squares techniques for the estimation of the induction motor para-meters[J].IEEE Transactions on Industry Applications,2003,39(5):1246-1247.
[2] Cirrincione M,Pucci M.Experimental berification of a technique for the real time identification of induction motors based on the recursive least-squares[C]//2007 7thInternational Workshop on Advanced Motion Control.IEEE Press:Piscataway,New Jerey,2002:326-334.
[3] Kataoka T,Toda S,Sato Y.On-line estimation of induction motor para-meters of by extended Kalman filter[C]//Fifth European Conference on Power Electronics and Applications.IEEE Press:Piscataway,New Jerey,1993(4):325-329.
[4] Jaramillo R,Alvarez R,Urdenas V,et al.,Identification of induction motor parameter using an extended Kalman filter[C]//1stInternational Conference on Elec-trical and Electronics Engineering.2004:584-588.
[5] Jang J H,Sul S K,Ha J I.Sensorless of surface-mounted Permanent Magnet Motor by High-Frequency Injection based on Magnetic Saliency[J].IEEE Tran-sactions on Industry Applications,2003,39(4):1031-1038.
[6] Zhou Xiaoyao,Cheng Haozhong.The Induction motor parameter estimation through an adaptive genetic algorthem [C]//39thInternational Universities Power Engineering Conference.IEEE Press:Piscataway,New Jerey,2004(1):494-498.
[7] 王慶龍,張 興.感應電機雙滑面變結構MARS轉速辨識[J].電機與控制學報,2010,14(10):32-43.
[8] 龍 云,王建全.基于粒子群游算法的同步發電機參數辨識[J].大電機技術,2003(1):8-11.
[9] 李 丹,高立群,黃 越,等.基于天體系統粒子群算法的異步電機參數辨識[J].東北大學學報:自然科學版,2008,29(9):1245-1248.
[10] 陳振鋒,鐘彥儒,李 潔.基于微粒群算法的感應電機參數辨識[J].電力電子技術,2009,43(8):23-25.
[11] M'hamed B,Ahmed O,Ali T,et al.Using two PSO-structures approaches to estimate induction machine parameters [C]// 2009 EPE’09.13th European Conference on Power Electronics and Applications.IEEE Press:Piscataway,New Jerey,2009:1-8.
[12] Karimi A,Choudhry M A,Feliachi A.PSO-based evolutionary optimization for parameter identification of an induction motor [C]//39th North American Power Symposium (NAPS 2007).IEEE Press:Piscataway,New Jerey,2007:659-664.
[13] Picardi C,Rogano N.Parameter identification of induction motor based on Particle Swarm Optimization[C]//SPEEDAM 2006 International Symposium on Power Electronics,Electrical Drives,Automation and Motion.IEEE Press:Piscataway,New Jerey,2006:32-37.
[14] Emara H M,Elshamy W,Bahgat A.Industrial Electronics,2008[C]//ISIE 2008.IEEE International Symposium on.IEEE Press:Piscataway,New Jerey,2008:841-847.
[15] 曾 靈,丁堅勇.基于混合算法的同步發電機參數辨識方法辨識[J].大電機技術,2006(6):13-16.
[16] Liu Li,Liu Wenxin,Cartes D A,et al.Real time imple-mentation of particle swarm optimization based model parameter indentification and an application example [C]//2008 IEEE Congress on Evolutionary Computation(CEC 2008).IEEE Press:Piscataway,New Jerey,2008:3480-3485.
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19
