直升機駕駛人員的可靠性分析與研究
2011-09-15 05:12:30陳圣斌周曉光曾曼成
直升機技術 2011年4期
陳圣斌,高 峰,周曉光,曾曼成
(1.中國直升機設計研究所,江西景德鎮 333001;2.陸航駐景德鎮地區代表室,江西景德鎮 333000)
0 引言
按照GJB451的可靠性定義,直升機的可靠性,即是在規定的條件下和規定的時間內,完成規定功能的能力。在這一定義的三個“規定”中,規定的時間和規定的功能都易于理解,而規定的條件,除了直升機本身的狀態之外,還應包括操縱和控制直升機飛行的人員及直升機的外部環境條件。無疑,只有這三個條件都正常時,直升機在規定的時間內才能安全可靠地完成飛行任務。顯然,規定的條件應包括直升機本身的狀態、駕駛人員的條件及外部環境條件。
在以往的型號設計中,人們所關心的是直升機的狀態,認為直升機完成規定功能的能力僅取決于直升機,直升機飛行的可靠性是由直升機的可靠性決定的。因此,在直升機可靠性工作中,無論是建模、分配和預計,還是可靠性的各種分析(FHA、FMEA、FTA等),都是以直升機為中心開展可靠性設計分析,對于人——操縱和控制直升機的駕駛人員,在整個任務時間內,都認為是能安全可靠地工作。
僅僅以直升機本身的狀態或者僅以直升機為中心開展直升機可靠性的分析和研究工作,這不只是國內的做法,也是國外的通行做法。無論是美國的UH-60、AH-64、V-22、RAH-66、S-92,還是歐直的“虎”式直升機、EH-101以及NH-90等直升機,它們的可靠性分析研究,都是以直升機為分析對象,在它們的FHA、FMEA、FTA等報告中,對人的失誤和差錯都不予以考慮。
事實上,從以往的統計數據來看:
1)在直升機的飛行事故中,有70%是人的失誤引起的[1];
2)在直升機的故障中,也有20~30%是人的差錯造成的[2]。
不難看出,在研究直升機的安全性、可靠性時,假設人的工作,即駕駛員操縱控制直升機的工作是安全可靠的,顯然是不合理的。
隨著航空科學技術的發展,直升機的可靠性在不斷地提高,然而直升機的飛行事故還是居高不下,有人甚至預言,隨著航空運輸的高速發展,到2015年,每星期將會發生空難一次。因此,美國航空運輸協會要求減少人的失誤,以提高直升機飛行的安全性和可靠性[1]。
如何來研究人的可靠性一直是一個棘手的問題。人的可靠性或人的行為差錯是受到各種因素的影響的,如人的體能限制(如人操作鍵盤的差錯率為2%)、社會環境、企業文化、培訓、技能水平、家庭環境、人際關系等。顯然人的可靠性是一個多變量的函數。
人們在長期的工作實踐中,積累了許多操作控制失誤或差錯數據,建立了許多人的可靠性分析方法。本文試圖根據這些人的失誤/差錯數據,以及1961年Swail和Rock提出的THERP(Technique for Human Error Rate Prediction)方法,分析研究直升機駕駛人員操縱控制直升機的可靠性,以拓展直升機的分析研究范圍,使直升機可靠性分析、計算更為完整,更與實際使用相符,找出薄弱環節(如人的操作鍵盤差錯率太高,影響信息輸入,此時可通過語言控制實現信息輸入),通過改進措施,提高駕駛員操縱控制直升機的可靠性。
(注:關于環境條件對直升機可靠性的影響,另文討論)
1 人的失誤/差錯
1.1 人的失誤模式[3]
人在實際工作中,或者駕駛員在操縱控制直升機的過程中,大致有12種人的失誤模式,即:
1)錯誤地執行任務或完成操作;
2)未能完成任務或操作;
3)在錯誤的方向上執行任務或完成操作;
4)執行錯誤的任務或操作;
5)任務或操作重復;
6)在錯誤的接口單元上執行任務或操作;
7)實施的操作太早;
8)實施的操作太遲;
9)實施的操作太快;
10)實施的操作太慢;
11)誤讀或誤判信息;
12)其它。
對于某一具體的工作程序,人的失誤應根據其程序中的各個步驟予以描述,例如直升機冷轉開車程序的每一操作步驟的人的失誤描述如表1所示。

表1 人的失誤描述
1.2 人的失誤概率
人的失誤概率是人的可靠性度量的主要參數,其定義如下:
式中:En為某一給定失誤模式的總次數;Ope為發生差錯或失誤的機會總次數;HEP為某一給定操作的失誤概率。
表2給出操作(部分)的人的失誤概率。
表3給出了顯示器上計數時人的失誤概率。
表4給出了操縱人員失誤的概率估計。這些失誤數據參見參考文獻[4]。
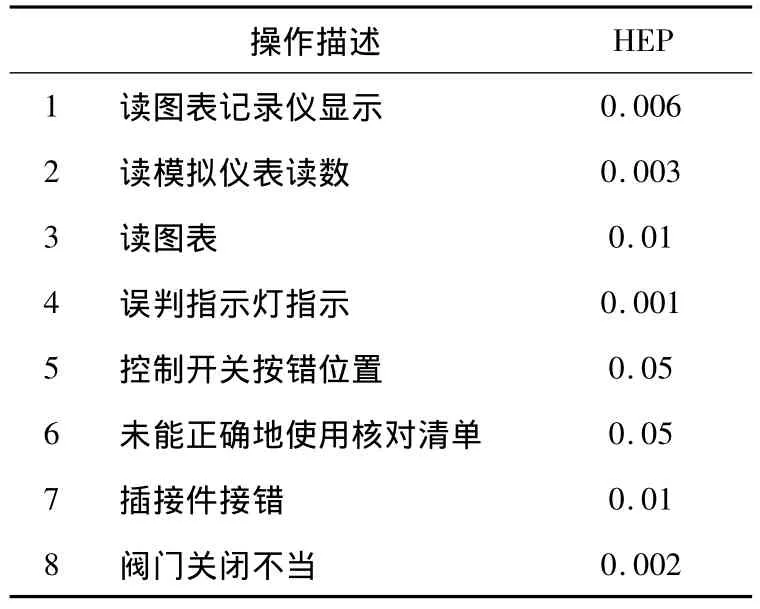
表2 部分操作人員的失誤概率
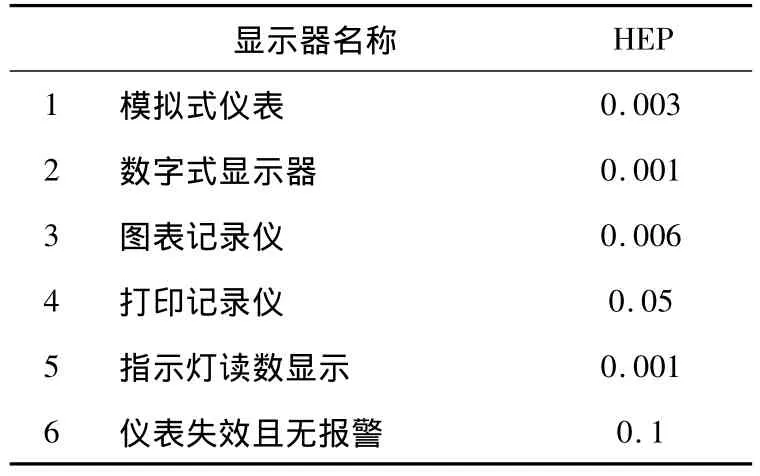
表3 顯示器上判讀時的人的失誤
表4 操作人員的失誤概率
2 人的失誤計算方法
本文采用1961年Swail和Rock提出的THERP(Technique for Human Error Rate Prediction)方法來分析計算人的操作或控制的人的失誤概率。這是工程技術進行安全性分析時的通用分析方法,在核工業部門也曾廣泛地應用于人的可靠性問題的計算。
這一分析計算方法的步驟如下:
第1步 進行操作分析
操作分析又稱任務分析。它是把人員的操作分解成一系列相連貫的順序動作步驟,以便建立事件樹。對于每一動作步驟必須確定:操作的部件、人員的操作動作、潛在的人的失誤、控制顯示狀態。
通常是以表格的方式描述這種操作分析。表1給出了直升機發動機開車冷轉程序的操作分析。
第2步 建立人員的可靠性分析事件樹
事件樹是描述人員進行操作過程中一系列操作事件序列的圖形表示方法。事件樹的每一次分叉表示事件在處理過程中的必要操作,這種操作可能正確完成或失誤,而每個事件中的枝終點表示一項操作的結束。它代表此項任務成功(S)或失敗(F)。
圖1給出了直升機發動機開車冷轉程序的人的可靠性分析事件樹。
圖1 直升機發動機開車冷轉程序人的可靠性分析事件樹
必須指出,建立人的可靠性分析事件樹是可靠性分析的基礎,這是重要的分析工作。
該例的事件樹較為簡單,對于復雜系統事件樹的分析,參見參考文獻[4]。
第3步 人的失誤概率選取和計算
確定人的可靠性分析事件樹中人的操作失誤的概率,在絕大多數情況下是十分困難的。它通常帶有很大的主觀性和經驗性。目前常用的人的失誤概率是以核電站人員可靠性分析手冊的數據為主(參見表2、表3和表4,也可參見參考文獻[5]和文獻[6]給出的數據),并根據專家的判斷進行選取。
第4步 行為形成因子的估算
操作人員因自身因素及作業環境的影響,事件樹中所列出的人的失誤概率還會發生變化。這種變化可以用行為形成因子來表述。限于篇幅,各種應力水平的行為形成因子參見參考文獻[4]。
在注冊安全工程師手冊中,這種行為形成因子是以修正系數來描述。作業時間、作業頻度、危險狀態、心理狀態、環境條件等因素的修正系數參見參考文獻[5]。
第5步 操作之間的相關性
正如上所述,每一項工作程序都是由許多相互有聯系的操作步驟逐步進行的。正如表1所示,只有保持T4溫度在200℃以下,其后才能將相應的發動機油門手柄置于后極限位置。因此每一操作步驟之間條件概率與操作之間的相依程度相關。在THERP方法中將操作之間的相依性分為5類,并給出了相應的概率計算公式。
1)完全相依:PF(B|A|CD)=1
5)零相依性:PF(B|A|ZD)=HEP
式中,HEP是B操作發生的人的失誤概率。
第6步 操作鏈概率的計算
操作鏈的概率計算或操作程序的人的失誤概率計算,是把每一步驟操作的條件概率相互乘積起來,即得到該操作鏈或操作程序中人的失誤概率。然后把每一步操作鏈概率相加起來,即得到整個程序的人的失誤概率。
按照上述計算方法,圖1發動機開車冷轉程序的人的失誤概率計算如下:
P(F1)=0.0004
P(F2)=0.9996·0.0002
P(F3)=0.9996·0.9998·0.002
P(F4)=0.9996·0.9998·0.998·0.0007
P(F)=P(F1)+P(F2)+P(F3)+P(F4)=0.0033
3 人的失誤計算方法在直升機的可靠性分析中的應用
3.1 分析程序
在直升機的可靠性分析中,可應用上面的人的失誤計算方法分析計算直升機駕駛人員操縱控制失誤的概率。其分析程序如圖2所示。
圖2 直升機人的可靠性分析程序
3.2 應用說明
現以直11型機為例,說明人的失誤分析計算方法(THERP)的具體應用。按照圖2的分析計算的應用程序,其步驟如下:
第1步 分析直11型機的飛行任務剖面
按直11型機研制任務書的要求,該型機包括起落航線飛行、轉場飛行、空域飛行、救援搜索飛行等7個飛行剖面。
第2步 選擇典型的飛行任務剖面
通常選擇駕駛人員操縱控制動作最多的飛行任務剖面作為研究分析對象。只要該任務剖面人的失誤概率能滿足要求,其它飛行任務剖面的人的失誤概率也就能夠滿足其要求。
因此,對于直11型機,可選擇救援搜索飛行的任務剖面為人的可靠性分析研究對象。
第3步 將所選擇的飛行任務剖面分成各個任務階段。
根據救援搜索飛行剖面的分析,該飛行剖面分解為圖3所示的14個任務階段,包括:開車起動、起飛、爬升、平飛、下滑、曲線飛行、貼地飛行、救援搜索飛行、貼地飛行、曲線飛行、爬升、平飛、下滑、著地。
圖3 救援搜索飛行剖面
第4步 將上述的14個任務階段都分解為系列的連貫的順序動作。
階段0開車起動這一任務階段的操縱控制的連貫順序如表5所示。
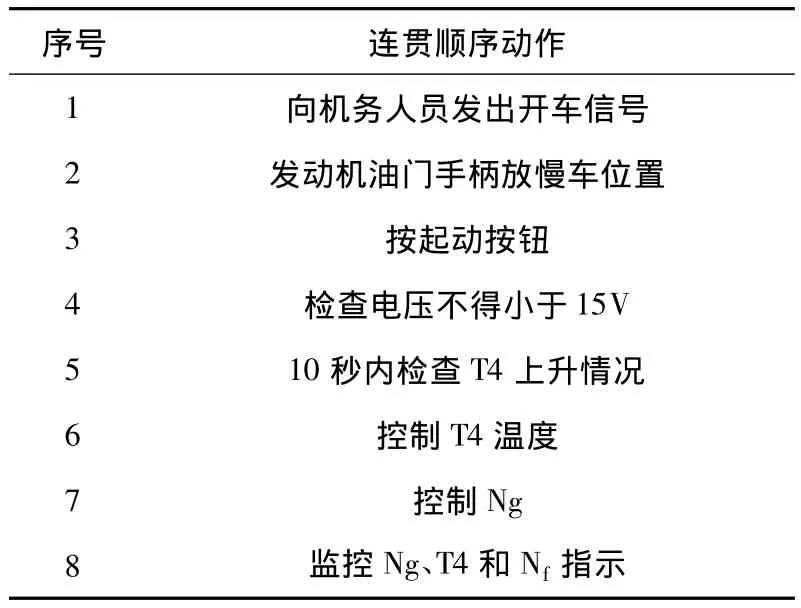
表5 開車起動連貫順序動作
階段1~階段5
同樣,可將階段1~階段5,起飛、爬升、平飛、下滑、曲線飛行等5個飛行階段分別分解為連貫順序動作。
階段6貼地飛行這一階段的操縱控制的連貫順序動作如表6所示。
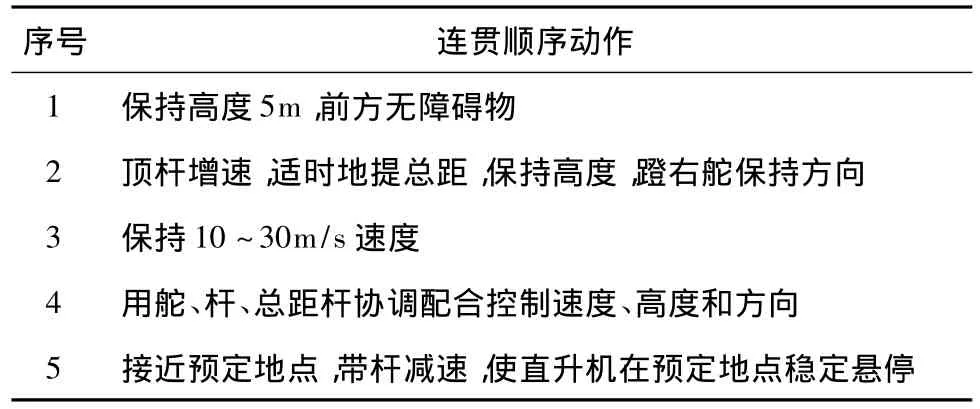
表6 貼地飛行連貫順序動作
階段7~階段13
同樣可將階段7~階段13救援搜索飛行后續的8個任務階段分別分解為連貫順序的動作。
第5步 按第二節的人的失誤分析計算方法,完成每一飛行任務階段人的失誤分析計算。
按第4步完成了救援搜索飛行剖面共計14個任務階段的操縱控制過程的連續順序動作分解之后,就按第二節的程序對每一任務階段建立人的可靠性分析事件樹。
例如,階段6貼地飛行階段人的可靠性分析事件樹如圖4所示。
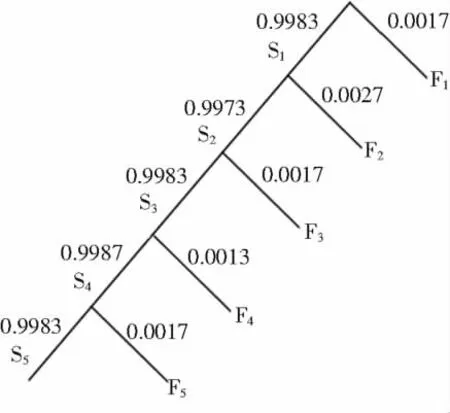
圖4 貼地飛行事件樹
上面事件樹中的成功概率(S)和失效概率(F)是根據表2~表4的失誤概率,并根據直升機空勤人員的判斷選取的。
由于上述操作都是由合格的空勤人員完成的,他們所在的駕駛艙都是環境控制的合適的環境條件,其行為形成因子PSF應為1。
另外,上述的每一操作控制動作都是連貫的順序動作,前一個動作的失誤將導致后一個動作的失誤。因此,前后動作完全相依。
在完成上述的分析之后,便按第二節的第5步進行操作鏈的概率計算,圖4貼地飛行階段的人的失誤概率計算結果為
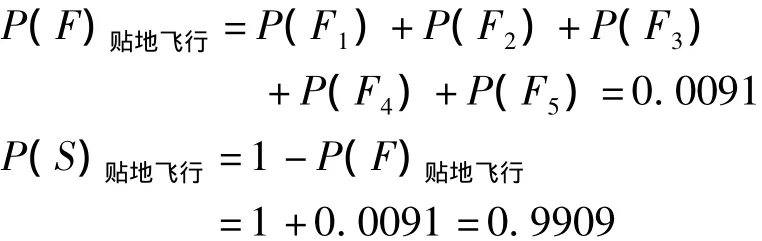
采用以上相同的分析計算方法,求得整個救援搜索飛行任務剖面各個飛行階段的P(F)和P(S)值如表7所示。
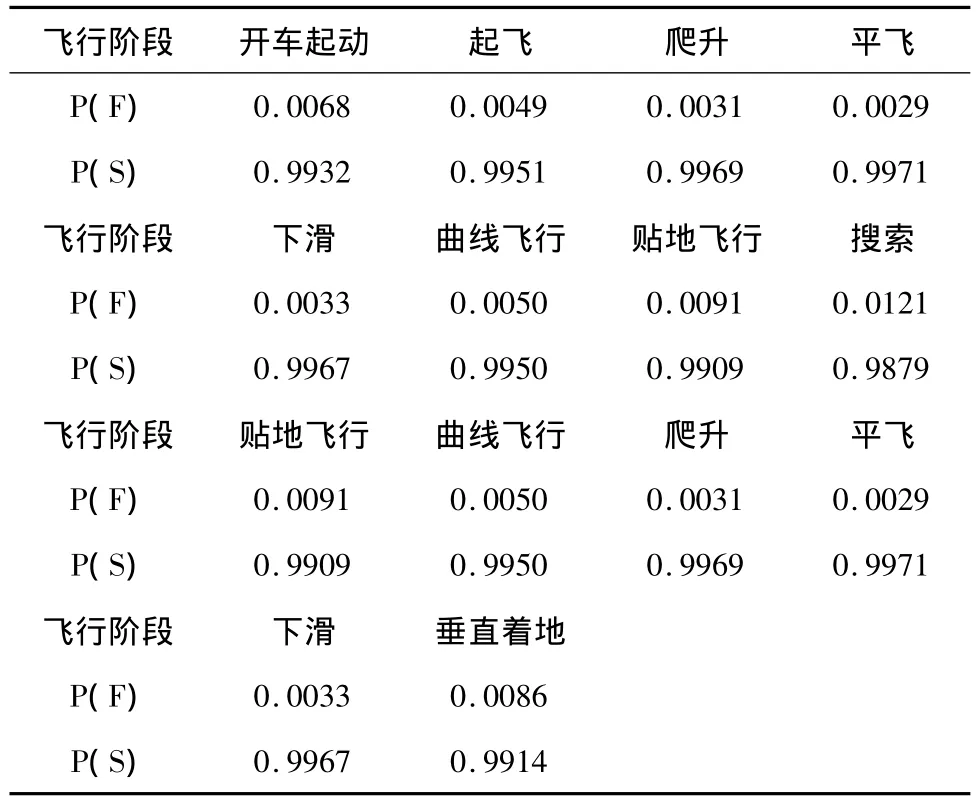
表7 救援搜索飛行各階段人的可靠性計算結果
第6步 計算整個飛行任務剖面駕駛人員操縱控制的可靠性
1)救援搜索飛行任務剖面的人的可靠性分析事件樹
根據表7的計算結果可得該任務剖面的人的可靠性分析事件樹如圖5所示。2)按圖5的事件樹,計算整個救援搜索任務剖面的駕駛員操縱控制可靠性
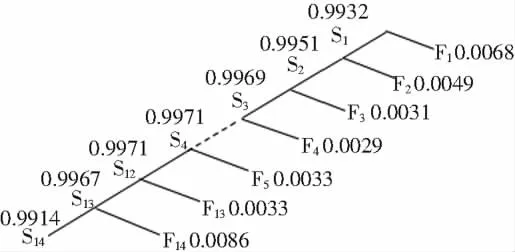
圖5 救援搜索飛行剖面人的可靠性分析事件樹
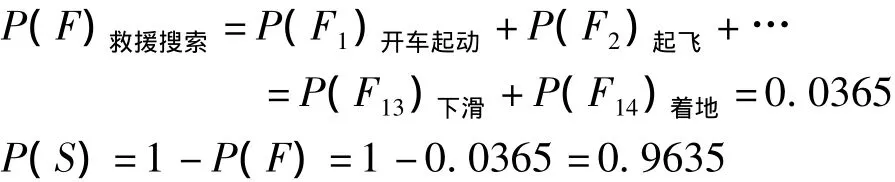
第7步 與所要求的人的失誤概率比較
如果研制任務書中,或研制部門根據研制要求提出新研直升機駕駛人員的操縱控制的失誤概率,那么將其與前面分析計算的結果(如救援搜索的P(F)=0.0365比較),如小于要求值,即分析結果滿足要求。如不滿足要求,即按第三節的第8步進行靈敏度分析,找出影響整個飛行任務剖面的人的失誤的主宰因素,然后采取相應措施,減少人的失誤概率。這些措施包括改進人機接口關系,如采用語音輸入代替作動鍵盤或開關輸入;增加相應的警告裝置;改進操作特征;加強空勤資源管理;增強人的培訓等。
4 結論
通過上面的研究分析可以得出如下結論:
1)THERP是一種很通用的人員操作的可靠性分析方法。只要掌握和理解系統整個操作程序,操作動作的成功、失敗的定義以及人的失誤概率,這種人的可靠性分析和計算方法是易于應用的;
2)THERP是一種定性定量的綜合分析方法,它適用于工程領域的人的可靠性分析和計算;
3)人的可靠性分析計算也是一種迭代分析過程,隨著設計過程的發展及信息資料的更新,此分析計算過程重復進行,從而獲得合適的結果;
4)應當指出,在直升機的可靠性分析中,考慮人的失誤之后,對包括人-機-環境系統在內的直升機的可靠性存在著明顯的影響;
5)在人的可靠性分析中,由于人的失誤數據的不足信,因此通過人的失誤分析,找出薄弱環節,采取相應措施,提高人的操作控制的可靠性,比之嚴格的定量計算更有意義。
致謝:
本文的撰寫過程中,得到陸航研究所楊宇航主任的指導和幫助,在此表示感謝。
[1]佐久間,秀武.ヒヱ-マンフュクヶ-実踐講座 ③ヒヱ-マンフュクヶ-でなぜ事故をなくせるのか[J].航空技術,2003,579(6):68-69.
[2]Sherry L,Fennel K.Human-computer Interaction Analysis of Flight Management System Message[J].Journal of Aircraft,2006,143(5):1372-1373.
[3]Stanton N A,Harris D,Salmon P M.Predicting design induced pilot error using HET(Human Error Template)-A new formal human error identification method for flight decks[J].The AERONAUTICAL JOURNAL,2006(2):107-114.
[4]黃祥瑞.可靠性工程[M].北京:清華大學出版社,1990,P190-209.
[5]羅 云,徐德昌,等.注冊安全工程師手冊[M].北京:化學工業出版社,2004.8.
[6]飛機安全性設計和評估[M].北京:航空工業出版社,2007.
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
山東工業技術(2016年15期)2016-12-01 05:31:22
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44