超聲波多點定位
2011-09-27 02:02:06陳玉林
物理實驗 2011年3期
關鍵詞:單片機
馬 龍,陳玉林
(南京信息工程大學數理學院,江蘇南京210044)
超聲波多點定位
馬 龍,陳玉林
(南京信息工程大學數理學院,江蘇南京210044)
介紹了利用超聲波對多個物體進行定位的裝置及方法,利用2個超聲波收發傳感器接收每個物體的反射波,并通過一定的算法計算出每個物體的位置.該裝置可對二維空間內多個物體進行定位,并可對其測速、跟蹤,甚至測出物體輪廓.
超聲波;定位;反射波
1 引 言
超聲波由于指向性強、能量消耗緩慢且在介質中傳播的距離較遠,因而經常用于距離的測量.超聲波的傳播方式為直線傳播,但遇到障礙物時會發生反射和繞射;頻率越高,反射越強,繞射越弱[1].
目前主要的超聲波定位方法有4種:a.在待定位物體上加裝超聲波發射器,物體周圍裝有若干超聲波接收器,通過計算發射器與每個接收器之間距離進行定位[2].b.與第一種相似,不同的是待定位物體上裝的是超聲波接收器,物體周圍裝的是發射器,通過計算接收器與每個發射器之間距離進行定位[3].這2種定位方法計算簡單,定位準確,但需要在物體上加裝發射或接收器,不能對普通物體定位.c.在待定位物體四周加裝多對小發射角的超聲波探頭,通過測量對各方向外界物體的距離來確定自身位置[4],這種方法同樣不能對普通物體進行定位,并且外界環境須為已知.d.模仿蝙蝠的定位原理,使用1個超聲波發射器,2個超聲波接收器,由物體反射波到達2個接收器所用的時間進行定位,該方法可以對普通物體進行定位,但容易受到干擾,當探測范圍內有多個物體時,定位結果將不準確.
本裝置使用2個超聲波收發傳感器,可以對測量范圍內的多個物體進行定位,抗干擾性能強,且可以使用廉價的發射角較大的超聲波發射器,節約了儀器成本,適用于機器人等設備探測外界環境.
2 超聲波定位原理分析
本方法需要至少2個超聲波收發傳感器,利用超聲波測距并通過一定的算法將各個物體與收發傳感器之間的距離計算出來,構成若干個三角形,進而確定物體的位置.
超聲波測距原理是利用飛越時間法(time of flight,TOF),即檢測超聲波往返的時間,所用時間與超聲波通過距離成正比,從而計算出超聲波所經的距離.當超聲波收發傳感器發出短暫脈沖時,計時開始,當超聲波收發傳感器接收到1個返回脈沖時,記錄得到的時間值t,則超聲波傳播的路程為 d=vt,其中 d為傳感器與被測物體之間的距離,v為超聲波在介質中的傳播速度[5].
按物體與收發傳感器之間的距離關系可分2種情況進行分析:a.所有物體與任一收發傳感器距離不等;b.至少有2個物體與某一收發傳感器距離相等.由后面的分析可知上述2種情況可以合二為一,但分情況討論可以簡化對數據的處理過程.
2.1 所有物體與任一收發傳感器距離不等
以二維平面內任意兩物體說明超聲波定位流程如圖1所示.
圖1中有收發傳感器1、收發傳感器2、任意位置2個(也可以多個)物體A和B,收發傳感器可以發送和接收超聲波,2個收發傳感器之間距離L為已知,通過單片機連接在一起.
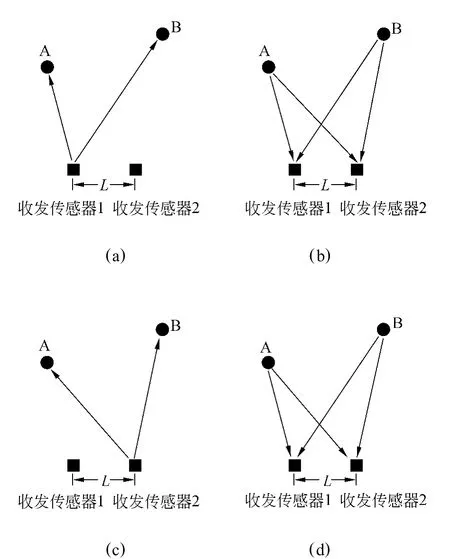
圖1 超聲波定位流程
用tmn表示收發傳感器1的接收時間,用 Tmn表示收發傳感器2的接收時間,下標m表示接收到的超聲波是由第幾個收發傳感器發射的,下標n表示接收到的是第幾次回波.
a.如圖1(a)所示,收發傳感器1發送一段超聲波,單片機開始計時.
b.如圖1(b)所示,超聲波遇到物體產生反射波,反射波分別被收發傳感器1和收發傳感器2接收,單片機分別記下接收時間.因為探測范圍內有2個物體,所以每個收發傳感器可以先后接收到兩段反射波,而我們此時無法判斷先收到的是哪個物體的反射波.記收發傳感器1先后收到反射波的時間為t11和t12,收發傳感器2先后收到反射波的時間為 T11和 T12.
c.如圖1(c)所示,收發傳感器2發送一段超聲波,單片機重新開始計時.
d.如圖1(d)所示,超聲波遇到物體產生反射波,反射波分別被收發傳感器1和收發傳感器2接收,單片機分別記下接收時間.如第二步所述,記收發傳感器1先后收到反射波的時間為 t21和t22,收發傳感器2先后收到反射波的時間為 T21和 T22.
由幾何關系可知:

利用(1)~(2)式可以判斷數據的有效性,如不滿足上述兩式,可能原因是所測物體速度已超出儀器精度,應將數據舍棄.
以收發傳感器1為圓心,以 t11/2,t12/2為半徑分別畫圓,然后以收發傳感器2為圓心,以T21/2,T22/2為半徑分別畫圓,可得出4個交點D,E,F,G,如圖2所示.
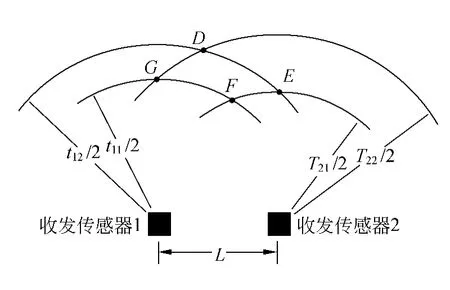
圖2 作出可能位置點
因為2個位置點要占盡4個圓弧,所以可以判斷物體的位置在D點、F點或者G點、E點,即如果將圓弧相交所得的圖形看作是扭曲的“矩形”,則物體所處位置的連線只能是“矩形”的對角線.所以只需判斷D,E,F,G任意一點是不是物體所處的位置即可定位兩物體,因為 F點與收發傳感器1和收發傳感器2距離之和最近,所以只需判斷t11/2與 T21/2的和是否等于 T11,如果等于,則 F點即為物體位置點,反之 F點不是物體位置點.
2.2 至少有2個物體與某一收發傳感器距離相等
上述分析是建立在對2個收發傳感器可以畫出相同個數圓弧的條件下的,如果此條件不成立,例如對收發傳感器2可以畫出3個圓弧(即收發傳感器2發送一段超聲波后收到3次回波),也就是說有2個物體與收發傳感器1距離相同,那么將有以下變動:
在b步驟中收發傳感器2將收到3次回波,設為 T11,T12,T13.
在d步驟中收發傳感器1將收到3次回波,設為t21,t22,t23,收發傳感器2將收到3次回波,設為 T21,T22,T23,由幾何關系可知:

繪制圓弧分析如圖3所示.
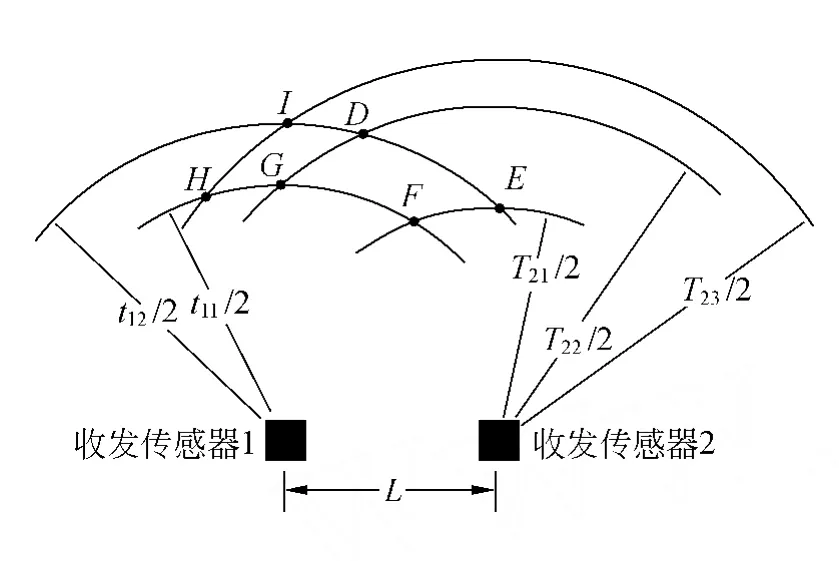
圖3 作出可能位置點
由圖3可知物體可能的位置點有6個,即D,E,F,G,H,I.利用 T11,T12,T13或者t21,t22,t23可以確定物體的位置.例如如果 t11/2與 T21/2之和等于t21,則可判斷 F點即為物體位置點,反之F點不是位置點,同理可判斷出其他位置點.以t21,t22,t23分別為長軸,以收發傳感器1和2為焦點畫橢圓,橢圓軌跡應當經過D,E,F,G,H,I中3點,即為物體的實際位置點.假設橢圓軌跡過E,G,I點,則 E,G,I點即為物體實際位置點.如圖4所示.
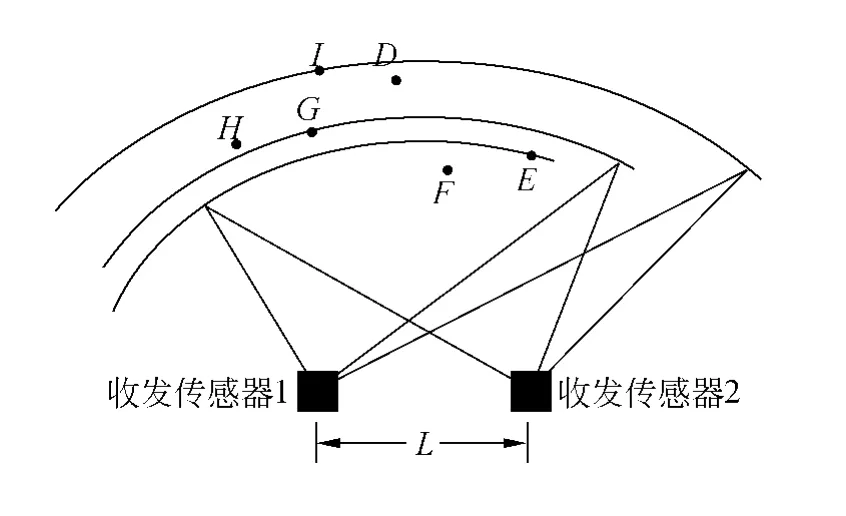
圖4 確定位置點
如果情況進一步特殊,例如在b步驟中收發傳感器1收到2次回波,而收發傳感器2收到3次回波,在d步驟中收發傳感器1收到3次回波,收發傳感器2收到2次回波,上述分析方法同樣適用.
3 測量范圍
每個收發傳感器都有其測量范圍,采用本方法的裝置測量范圍為兩收發傳感器的交集,如圖5所示.
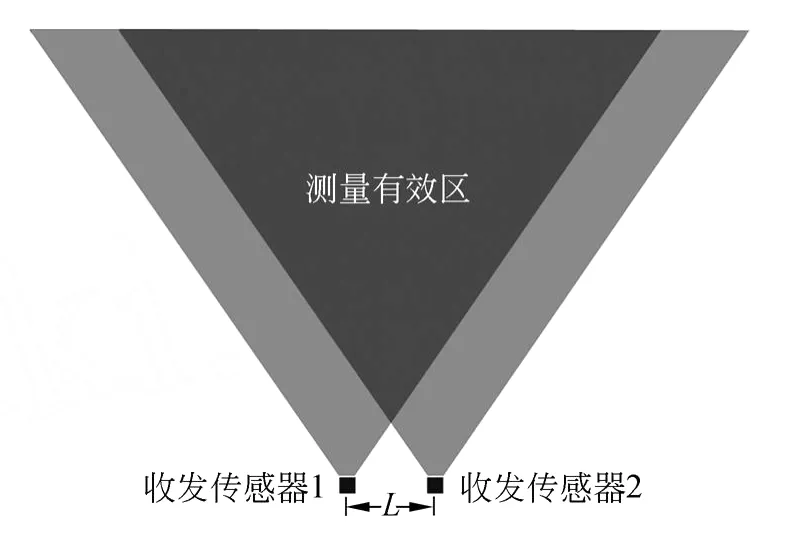
圖5 裝置測量范圍
4 超聲波定位電路
圖6為超聲波收發電路,40 k Hz超聲波信號通過Input端輸入到放大電路,經過三極管Q1、變壓器TR1放大后由收發傳感器S1發射出去.超聲波遇到物體返回后由S1接收,因為超聲波信號比較微弱,轉換為電信號后幅值很小,因此首先要進行放大.超聲信號在傳輸過程中不可避免地混有環境中的噪聲,超聲波傳輸距離和角度的變化也會引起信號電平的變化.因此,接收時必須對原始信號進行適當的調理,盡可能地減小這些因素的影響[6].電信號經過 R1,C1送到 U2,U2為選頻放大器,對信號進行濾波放大后由Output端輸出,D1和D2反向并聯起到限幅通過作用,因為反射波信號較弱,無法通過D1和D2,減少了對反射信號的衰減.而發射波信號較強,使D3和D4導通,進而屏蔽了發射波對U2的影響.
超聲波處理電路見圖7(電源未畫出),單片機采用A tmega16,8 M Hz晶振,用12 864點陣液晶屏顯示物體位置.單片機采用定時器0產生40 k Hz矩形波通過Output1和Output2端輪流輸出,由Input1和Input2端接收超聲波信號,基于中斷的接收方式以提高單片機的運算效率[7].
因為需要用2個收發傳感器,所以實際電路中需要2組如圖6中的電路,分別與圖7中電路相連接,即收發電路中Input接單片機中Output1,收發電路中Output接單片機中 Input1,同理另外一組收發電路與單片機中Output2和 Input2相接.單片機處理后數據可由TW I和USART等通信接口送至其他應用電路.
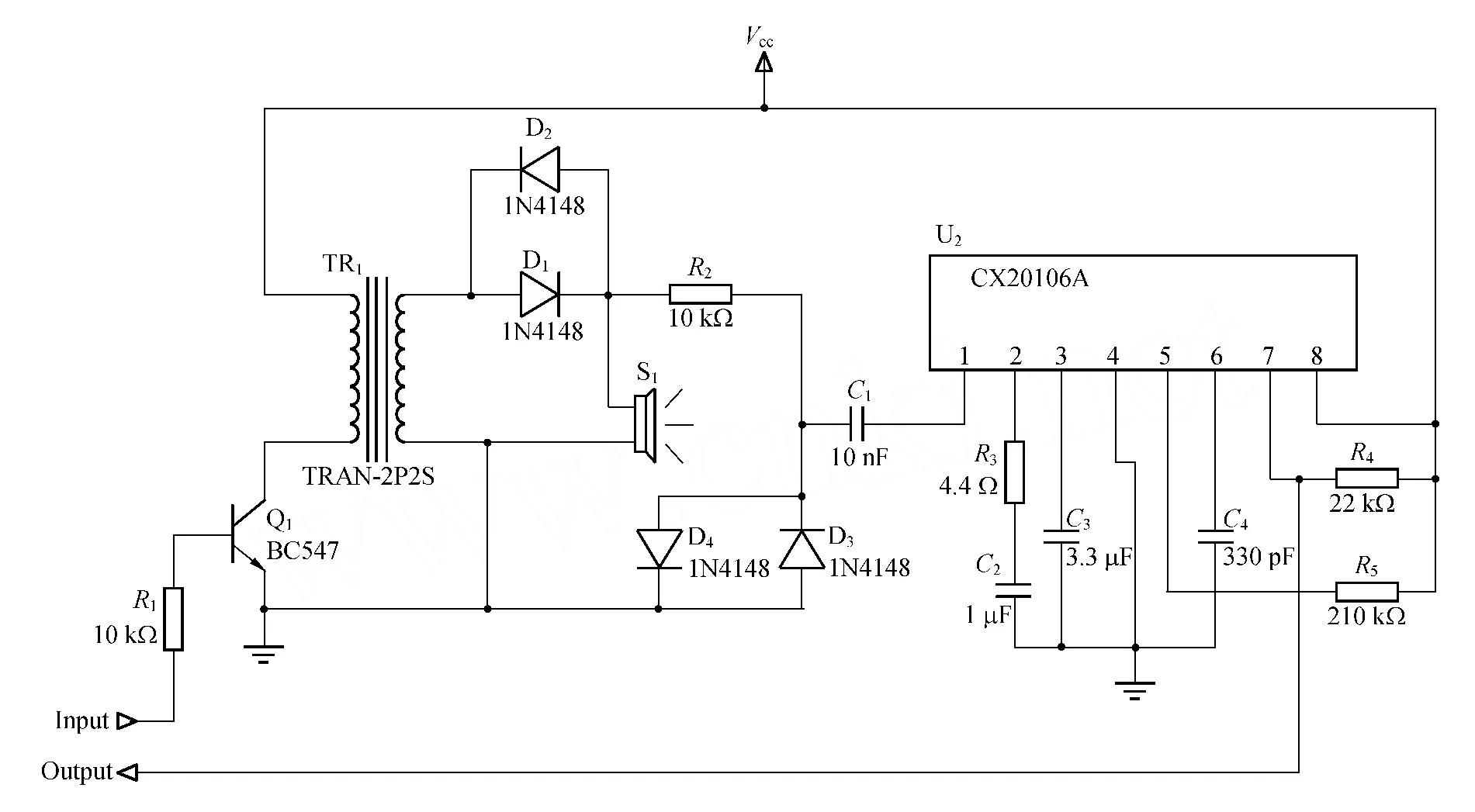
圖6 超聲波收發電路
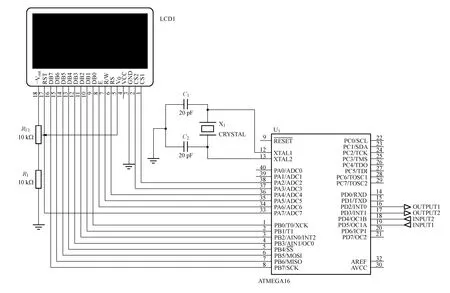
圖7 單片機處理電路
5 單片機程序執行流程
單片機中超聲波處理程序[8]如圖8:
將數據 t11,t12,t13…存入數組 t1[];T11,T12,T13…存入 T1[];t21,t22,t23…存入 t2[];T21,T22,T23…存入 T2[].
數組 r1[],r2[]用來存放顯示數據.單片機計算出某個物體位置后,將該物體與TR1距離存放在 r1[],與 TR2距離存放在 r2[],當液晶屏或者其他電路需要物體信息時,讀取數組 r1[]和 r2[]對應數據即可.
可以在顯示屏上定出坐標,顯示屏上的圖像即為2個收發傳感器前方二維平面內的物體的分布情況,每個點均表示物體所在的位置,如果提高測量精度,許多個點將連成線,從而顯示出物體的輪廓.
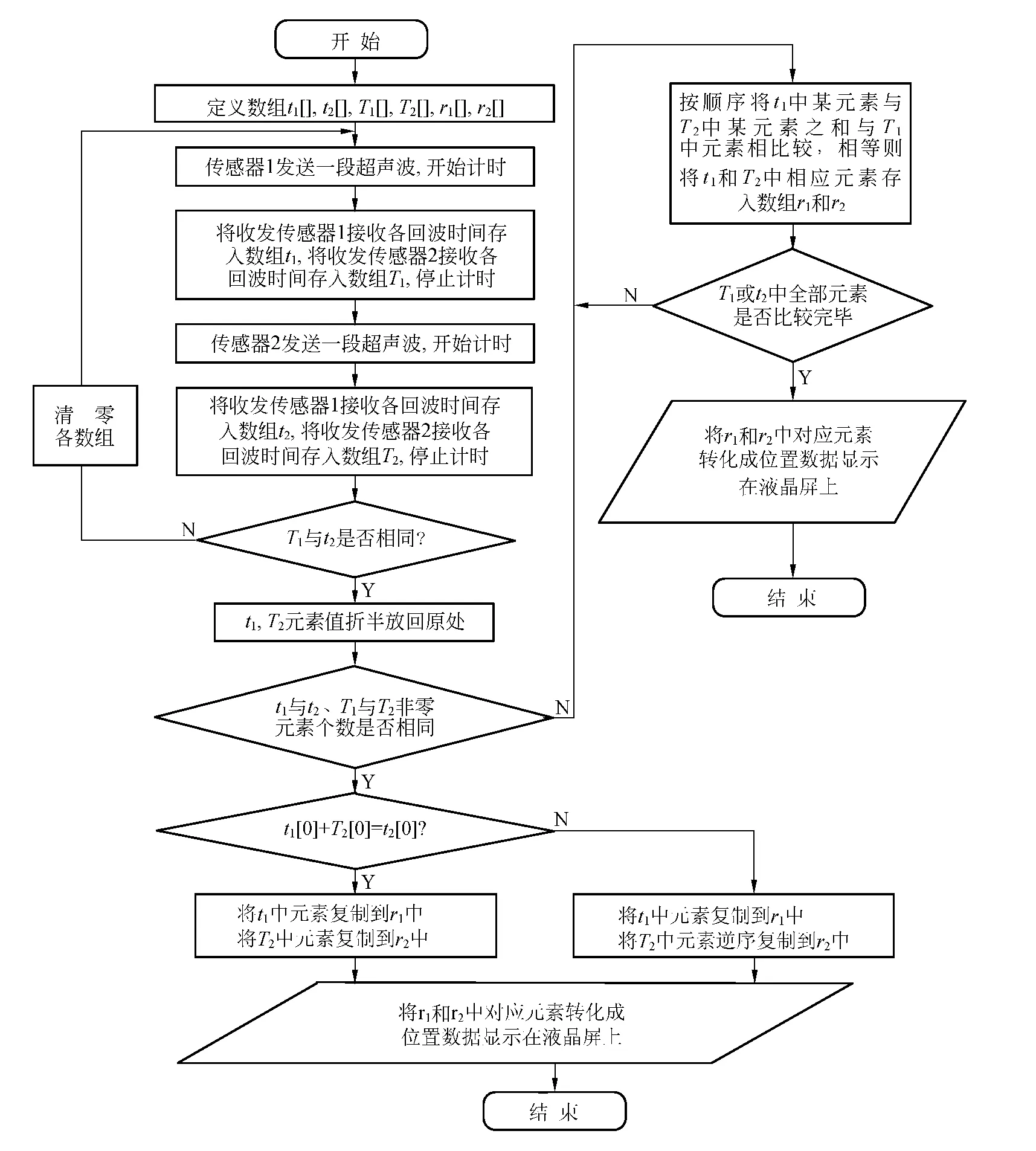
圖8 超聲波處理程序流程圖
6 幾點說明
1)由于超聲波在空氣中的傳播速度受溫度影響,根據V≈331.4+0.607 T可以對超聲波的速度加以校正,得到較好的定位精度[9].
2)因為超聲波傳播速度容易受天氣因素影響,故本裝置適于在室內環境中使用.
3)主要有以下幾種誤差源影響測量結果:超聲波速度誤差,電路延遲誤差,計時誤差.其中以速度誤差影響最大。
[1]卿太全,梁淵,郭明瓊.傳感器應用電路集萃[M].北京:中國電力出版社,2008:124-128.
[2]沈兆軍,王吉林.基于超聲波定位的車輛路徑監測系統[J].自動化技術與應用,2009,28(2):121-123.[3]華蕊,郝永平,楊芳.超聲波定位系統的設計[J].國外電子測量技術,2009,28(6):65-66.
[4]黃慶成,洪炳,Khurshid J,等.全自主足球機器人的超聲波定位避障系統[J].哈爾濱工業大學學報,2003,35(9):1 077-1 079.
[5]原新,王東陽,嚴勇杰.基于推算定位和超聲波定位融合的機器人自主定位技術[J].海軍工程大學學報,2009,21(5):67-68.
[6]厡玉磊,王安健,蔣理興.一種使用紅外線和超聲波的定位技術[J].電子測量技術,2008,31(10):15-17.
[7]江海波,王卓然,耿德根.深入淺出AVR單片機—從A tmega48/88/168談起[M].北京.中國電力出版社,2008:86-94.
[8]譚浩強.C語言設計[M].北京.清華大學出版社,2005:20-21.
[9]艾廣燚,李麗娟.一種短距離超聲波定位裝置的研究與設計[J].科技資訊,2010(4):200.
[責任編輯:郭 偉]
Multiple objects location using ultrason ic position ing
MA Long,CHEN Yu-lin
(College of Mathematic and Physics,Nanjing University of Info rmation Science and Technology,Nanjing 210044,China)
Themethod and the device of ultrasonic to detectobjectswere p resented.It realized the location of one object by using two ultrasonic sensors receiving reflection wave of the object,and a certain algo rithm to calculate the position.This device was available to locate m ultip le objects in 2-dimentional space,and it could measure the speed,tracking,and even get the contours of objects.
ultrasonic;multip le objects location;reflection w ave
O426.2
A
1005-4642(2011)01-0041-06
2010-05-28;修改日期:2010-08-25
南京信息工程大學“大學物理與實驗教學團隊”教改工程資助項目(No.N1885008154)
馬 龍(1988-),男,江蘇連云港人,南京信息工程大學數理學院2007級本科生.
指導教師:陳玉林(1971-),男,江蘇南通人,南京信息工程大學數理學院副教授,從事物理實驗教學研究.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36