哈佛科學家研究可變形機器人輕松穿越狹小空間
2011-09-30 06:08:18本刊編輯部
創新科技
2011年12期
關鍵詞:變形
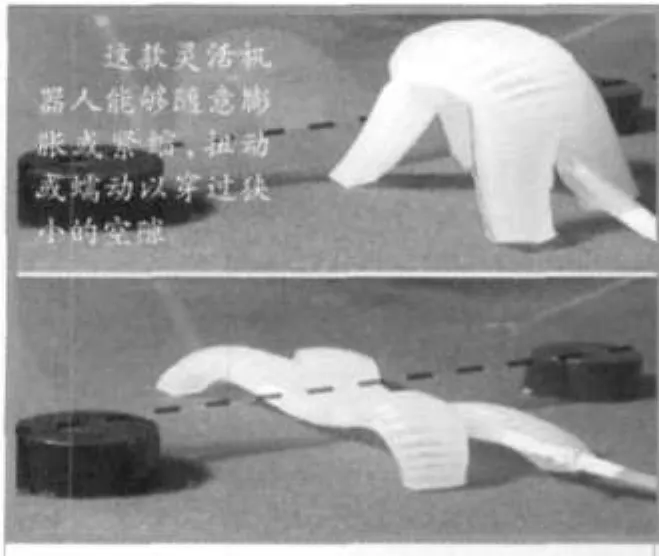
哈佛大學的科學家近日研發了一款可變形的靈活機器人,它能通過緊密的關節空隙扭動,這是目前軟體機器人領域最先進的機器人模型。這款軟體機器人靈感來自魷魚和海星,這兩者能夠改變身體形狀移動,能對地震災難起到非常大的作用,可穿越狹小縫隙展開營救工作。
它們還能用于地形險要的戰地,軟體機器人獨特的變形技巧使得它們能前往傳統剛性體機器不適合的戰地。
化學家喬治M懷特賽德斯帶領的科研人員測試了機器人的靈活性,他們控制機器人通過蠕動從一塊只有0.75英寸玻璃片下面穿過。科學家利用不同的運動方式組合操縱該軟體機器人穿過這個狹小的空隙15次,大多數情況機器人穿過縫隙的時間不到一分鐘。
當然這款機器人也存在缺陷。它依賴于外部電源,科學家必須研發新的方式集合電源使得它能夠用于實戰。
登錄APP查看全文
猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
學與玩(2005年3期)2005-04-29 00:00:00