基于實時操作系統(tǒng)的雷達接口控制軟件設計
2011-09-30 01:38:02何海龍張緋麗
火控雷達技術 2011年4期
何海龍 王 明 張緋麗
(西安電子工程研究所 西安 710100)
1 引言
接口控制計算機是雷達的重要組成部分,承擔著雷達內部各子系統(tǒng)和雷達輸入輸出信號的通信、控制等任務。隨著雷達系統(tǒng)的功能需求與復雜性的不斷提高,雷達的接口也日益復雜和多樣,并且對可靠性和實時性有很高的要求。雷達接口控制計算機最主要的任務就是協(xié)調主控計算機和各個子系統(tǒng)之間的工作。根據(jù)主控計算機的指令對雷達的方位、俯仰驅動器、敵我識別器等設備實時精確控制,接收各分系統(tǒng)的狀態(tài),進行解析和上報。
在傳統(tǒng)方式中,主控計算機內插入各種接口板卡,通過控制接口板卡來實現(xiàn)對雷達設備的控制和管理。現(xiàn)代雷達中接口種類多、功能復雜、實時性要求高,這些接口全部通過主控計算機直接進行控制較為繁瑣,且會降低主控計算機的效率。因而,采用主從——分布式結構,利用高性能微控制器(MCU)構建接口控制計算機來擴展主控計算機的接口是一種較理想的方式。接口控制計算機負責完成對雷達功能模塊和外部設備的管理和控制,減輕了主控計算機的工作負擔。通過10/100/1000M以太網(wǎng)完成與主控計算機之間的通信,使得主控計算機能夠方便、快捷并高效地訪問雷達各個模塊和設備。對于主控計算機,接口控制計算機就像它本身的一個模塊一樣,實現(xiàn)了接口的透明訪問。
嵌入式系統(tǒng)以其本身體積小,功能多,高智能等優(yōu)點而逐漸地被引入到雷達控制領域。本文描述了嵌入式MCU構建的雷達接口控制計算機,著重分析、討論了采用 μC/OS-II[1]操作系統(tǒng)設計雷達控制接口軟件的思想和實現(xiàn)方法。
2 雷達接口控制計算機組成與功能
雷達接口控制計算機主要是以MCU和FPGA為核心,配置多種外圍接口,實現(xiàn)對外圍設備的控制與監(jiān)視。MCU與FPGA通過擴展總線實現(xiàn)高速互聯(lián),相互共享信息。在系統(tǒng)中FPGA主要完成開關量輸入信號去抖動,開關量輸出信號保護,以太網(wǎng)媒體訪問控制層(MAC)層,地址譯碼,ADC控制與數(shù)據(jù)采集,接收系統(tǒng)定時信號并產生同步輸出,系統(tǒng)安全連鎖保護等功能。MCU主要完成通信協(xié)議的封裝、解析,控制方位和俯仰驅動器,采集外設狀態(tài)并上報給主控計算機,實現(xiàn)CAN總線與以太網(wǎng)之間的轉發(fā)路由,接收GPS、陀螺、驅動器等外設的串口數(shù)據(jù)等功能。
嵌入式處理器采用TI公司最新推出的最新32位浮點數(shù)字信號控制器TMS320F28346,其核心頻率高達300MHz,集成了32位浮點處理單元,258k×16位單時鐘周期訪問單周期訪問靜態(tài)RAM(SRAM)和大量通用外設。該控制器兼顧了DSP強大的處理核心和MCU豐富的片上外設,功能強大、性能穩(wěn)定可靠,片上資源豐富。
雷達接口控制計算機外圍接口包括:16路單端或8路差分16位AD、4路16位DA、16路光電隔離輸入(SI)、10路光電隔離輸出(SO)、8路RS422電平差分IO、2通道光電隔離 CAN、五通道隔離RS422串口、1路10M/100M/1G以太網(wǎng)、1路定時同步輸入與輸出、以及電源及濾波電路組成。完成系統(tǒng)通信、驅動器控制、鎖定控制、系統(tǒng)狀態(tài)數(shù)據(jù)采集、數(shù)據(jù)處理、敵我識別器控制、接收GPS數(shù)據(jù)與授時、產生或接收系統(tǒng)定時、增量碼接收等功能。系統(tǒng)組成圖1所示。
由于本系統(tǒng)的實時性要求(例如:通信接口之間的數(shù)據(jù)轉發(fā)時間小于200μs,形成陀螺反饋輸出的滯后時間小于100μs等)與復雜性,根本不可能采用查詢方式或前后臺系統(tǒng)保證其實時性。為此采用了μC/OS-II嵌入式多任務實時操作系統(tǒng)。由于嵌入式實時操作系統(tǒng)的引入,提高了CPU、總線等資源的利用率,從而保證了系統(tǒng)的實時性。
3 基于μC/OS-II的軟件設計
對于比較復雜的軟件系統(tǒng),在軟件設計時需要遵循簡單準則、同型準則、層次準則、線型準則、易證準則與安全準則等軟件設計準則。多任務操作系統(tǒng)從它產生的原因到現(xiàn)在的廣泛應用,正是由于它簡化了編程模型,滿足了簡單、同型、層次化等準則。
在接口控制計算機中,由于系統(tǒng)需要同時處理多個任務,且所有任務都有嚴格的實時性要求,在MCU上運行μC/OS II嵌入式多任務實時操作系統(tǒng)是最優(yōu)的軟件結構之一。由于多任務實時操作系統(tǒng)的引入,簡化了系統(tǒng)編程模型,降低了程序設計難度。
在多任務實時操作系統(tǒng)應用中,軟件設計的重點與難點是任務劃分和資源分配與共享。
3.1 任務劃分
任務作為多任務系統(tǒng)中的獨立執(zhí)行單元,有獨立的CPU時間片、堆棧與內存空間,同時系統(tǒng)內的任務共享總的CPU時間,任務之間需要進行通信。因此合理的任務劃分是保證系統(tǒng)效率與實時性的關鍵。
在將軟件系統(tǒng)分解成并行任務時,任務的大小粒度根據(jù)任務的特性確定,如果粒度太大會影響任務的實時性;如果粒度太小會增大系統(tǒng)的任務切換開銷與任務管理復雜度,降低系統(tǒng)的效率。主要需考慮系統(tǒng)內功能的異步性,任務按照I/O依賴性、時間關鍵性的功能、計算量大的功能、功能內聚、時間內聚、周期執(zhí)行的功能等任務劃分準則進行劃分。實時性要求高的、獨占系統(tǒng)資源的任務采用小的粒度,否則采用大的任務粒度。
根據(jù)接口控制計算機的應用需求,把接口控制計算機軟件劃分為接收陀螺數(shù)據(jù)任務、以太網(wǎng)發(fā)送數(shù)據(jù)任務、一層CAN總線發(fā)送數(shù)據(jù)任務、敵我識別器控制任務、接收詢問機數(shù)據(jù)任務、伺服控制任務、接口控制計算機故檢任務、接收以太網(wǎng)數(shù)據(jù)包任務、接收控制處理計算機命令任務、接收主控計算機CAN總線消息任務、接收GPS數(shù)據(jù)任務及人機交互任務。接口控制任務劃分如圖2所示。
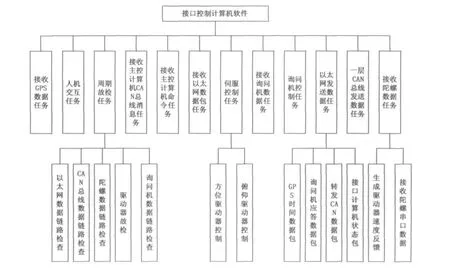
圖2 接口控制計算機軟件任務劃分圖
一個任務的執(zhí)行與掛起必須要有相應的約束條件,這些條件稱為軟件的驅動模型。常見的軟件驅動模型有數(shù)據(jù)驅動模型,時間驅動模型,事件驅動模型以及它們的混合模型。分析接口控制計算機軟件的特點,可知接口控制計算機軟件的驅動模型屬于混合模型。為了讓不同驅動模型的任務良好協(xié)作,降低系統(tǒng)內任務之間通信的時間開銷,任務之間通信采用全局緩沖隊列,資源的互斥使用信號量完成。實現(xiàn)的接口控制計算機軟件活動關系如圖3所示。
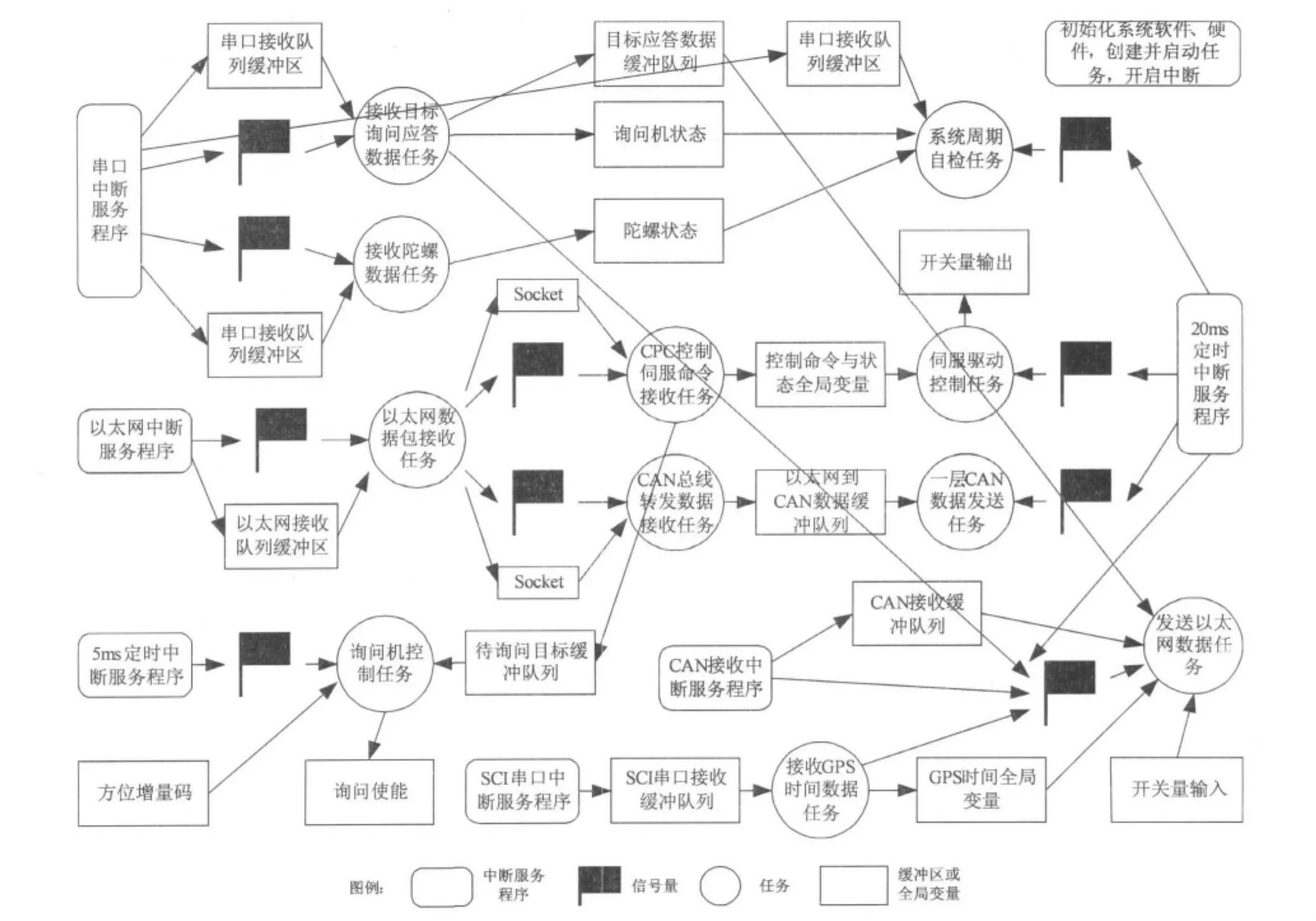
圖3 接口控制計算機軟件活動圖
3.2 資源分配
在嵌入式系統(tǒng)中,CPU時間、堆棧空間、存儲空間、共享的I/O接口等系統(tǒng)資源是非常有限的,因此需要對資源進行統(tǒng)籌分配,提高資源利用率,從而降低系統(tǒng)的硬件需求,減小系統(tǒng)的體積與功耗。尤其是MCU內部RAM存儲空間和任務優(yōu)先級的分配。
根據(jù)系統(tǒng)提供的資源的限制性條件,TMS320C28346的內部空間配置,應用程序對資源的需求,對其存儲空間應用分配如表1所示。
需要特別說明的是,在TMS320C28346中,堆棧空間的位置必須位于0x10000地址以下[2],否則μC/OS-II操作系統(tǒng)的行為不可預知。堆棧溢出時,會導致程序跳轉到未知的位置,并且很難通過應用程序對程序進行檢測,因此嵌入式多任務系統(tǒng)的堆棧分配是必須仔細設計。堆棧空間的大小需要根據(jù)具體任務使用情況進行調整。分配的方法是先給任務分配一個較大的堆棧空間,然后運行程序,通過μC/OS-II提供的監(jiān)控程序對堆棧使用情況進行統(tǒng)計,根據(jù)極限情況得到堆棧的大小分配堆棧空間,分配堆棧段時必須需要留一定的安全容量。
在嵌入式多任務實時操作系統(tǒng)中,每一個任務都對應一個優(yōu)先級,優(yōu)先級高的任務可以打斷優(yōu)先級低的任務的執(zhí)行,搶占低優(yōu)先級任務的CPU時間資源,優(yōu)先執(zhí)行優(yōu)先級高的任務,從而保證系統(tǒng)的實時性。對任務進行合理的優(yōu)先級分配是保證系統(tǒng)實時性的必要條件之一。任務優(yōu)先級按照粒度小的任務優(yōu)先級高、執(zhí)行頻率高的任務的優(yōu)先級高、獨占系統(tǒng)資源的任務的優(yōu)先級高、有特殊實時性性能要求的任務的優(yōu)先級高。根據(jù)任務劃分和任務的屬性,任務的優(yōu)先級分配見表2。
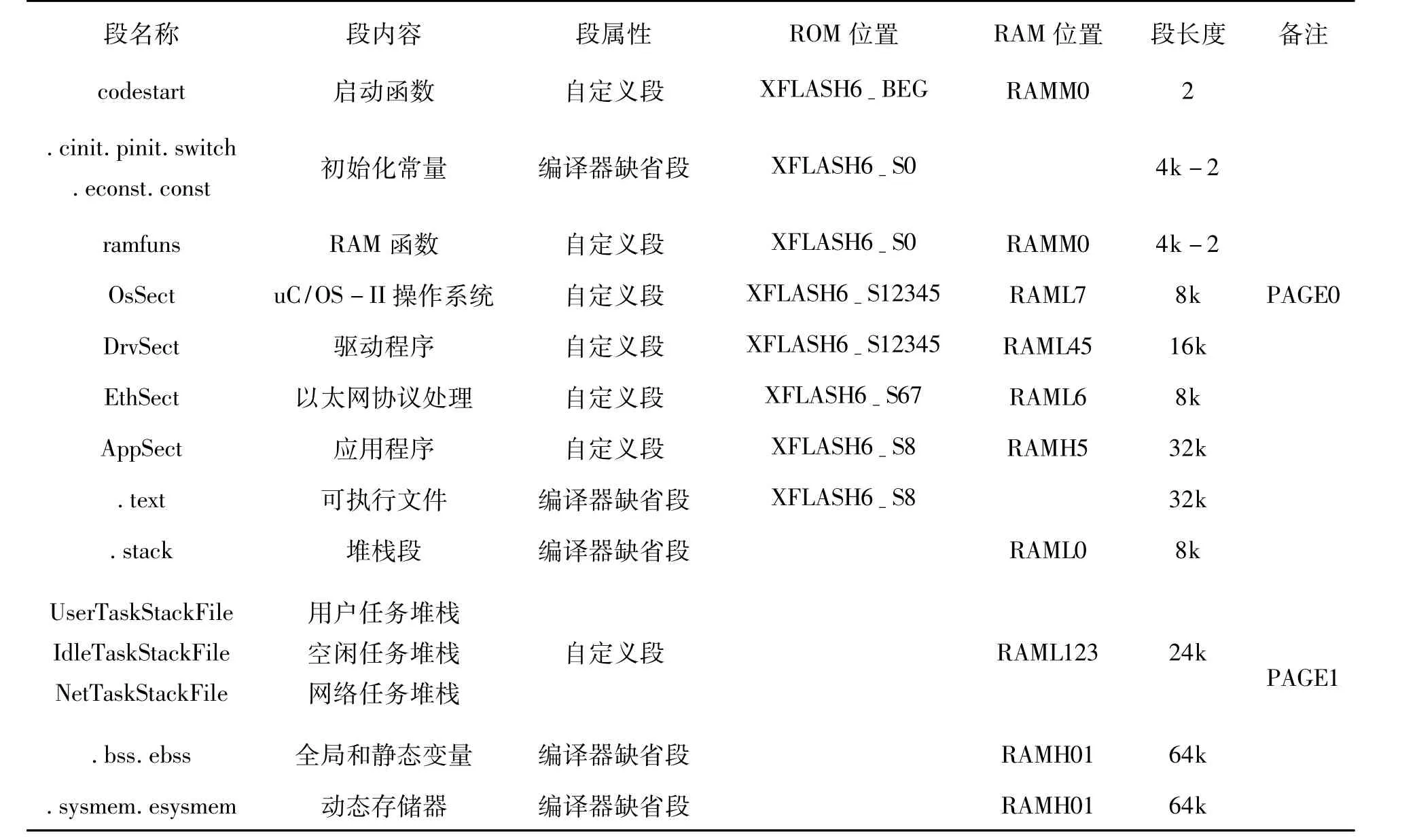
表1 MCU存儲空間應用分配表
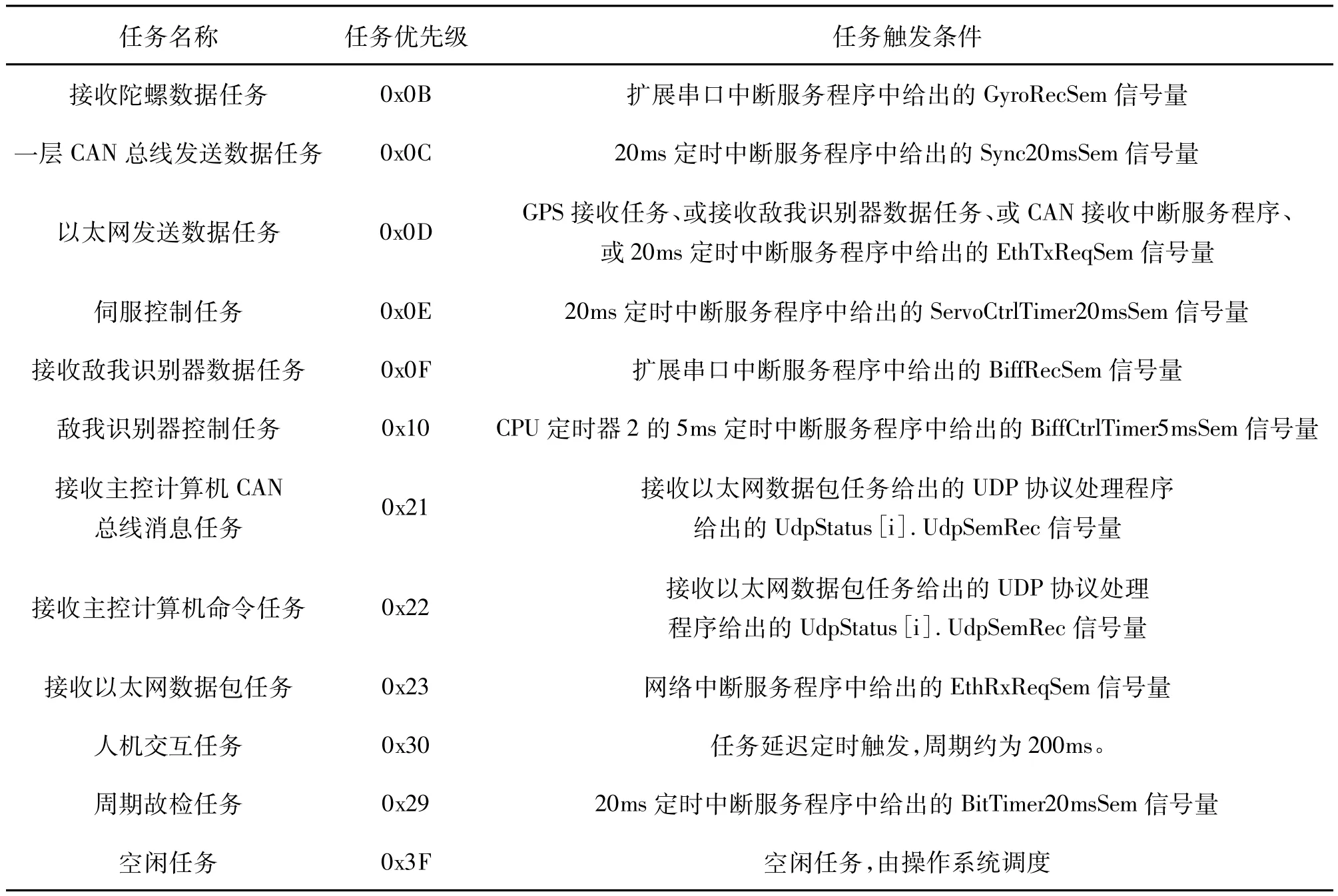
表2 任務優(yōu)先級分配表
3.3 任務設計
由于μC/OS-II操作系統(tǒng)的引入,根據(jù)系統(tǒng)需求進行任務劃分,每個任務都完成一個相對簡單的功能,因此方便了系統(tǒng)軟件設計。下面就以接收陀螺數(shù)據(jù)任務為例說明任務的設計,其余任務于此相似,不再贅述。
串口中斷服務程序接收到與陀螺通信串口的數(shù)據(jù)后,把數(shù)據(jù)寫入循環(huán)緩沖隊列,然后給出相應的信號量通知接收陀螺數(shù)據(jù)任務。接收陀螺數(shù)據(jù)任務收到串口中斷服務程序給出的信號量后,檢測接收緩沖區(qū)內的數(shù)據(jù),按照通信協(xié)議對數(shù)據(jù)進行解析,得到陀螺速率,并根據(jù)主控計算機給出的余割補償系數(shù)和驅動器給定值,計算得到驅動器的反饋電壓和控制電壓,最后更新反饋和控制電壓到相應的DAC。接收陀螺數(shù)據(jù)任務就完成了一次接收后,等待下一次信號量的到來。接收陀螺數(shù)據(jù)任務數(shù)據(jù)流圖如圖4。
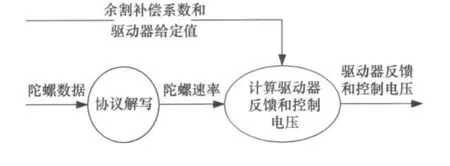
圖4 接收陀螺數(shù)據(jù)任務數(shù)據(jù)流圖
由圖4可知,由于μC/OS-II操作系統(tǒng)的引入極大地簡化了軟件設計,省去了單任務系統(tǒng)或前后臺系統(tǒng)中復雜的定時、數(shù)據(jù)、狀態(tài)驅動的跳轉邏輯。使得程序易于設計、檢查、維護。
4 結束語
本文以MCU和FPGA構建的嵌入式實時系統(tǒng)為對象,分析了系統(tǒng)中軟件設計的思想,討論了系統(tǒng)任務劃分的準則和資源分配的方法,方便地實現(xiàn)了對主控計算機的通信與控制接口實時擴展。基于此思想的軟件設計方法已經成功應用于某型號雷達系統(tǒng)中,系統(tǒng)實測任務響應時間小于50μs,遠小于系統(tǒng)需求的100μs。實踐證明系統(tǒng)性能強大、實時性好、擴展性強、故障檢測與保護措施完備、工作穩(wěn)定可靠。
[1]Jean J·Labrosse著,邵貝貝等譯.嵌入式實時操作系統(tǒng)μC/OS II[M].北京:北京航空航天大學出版社,2006.
[2]Texas Instruments.TMS320C28x Assembly Lan guage Tools v5.0.0 User's Guide[M].2007.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:34
鐵道通信信號(2018年2期)2018-04-18 12:18:23
消費導刊(2017年20期)2018-01-03 06:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
電鍍與環(huán)保(2016年3期)2017-01-20 08:15:32
衡陽師范學院學報(2015年3期)2015-02-10 06:02:23
