加速度傳感器信號增益的軟件實時控制
2011-10-08 07:31:04張建新
傳感技術學報 2011年5期
關鍵詞:信號
張建新,張 合
(南京理工大學智能彈藥技術國防重點學科實驗室,南京210094)
電荷放大器作為一種直接將電荷量轉換成電壓信號的放大電路,廣泛應用于壓電傳感器、光電傳感器等類型傳感器的信號調理電路中,而且,電荷放大器也是壓電式加速度傳感器信號調理電路中最常用的前置放大電路[1]。壓電式加速度傳感器的信號調理電路在設計完成后,需要對輸出電壓靈敏度進行標定,在標定過程中,由于不同的傳感器具有不同的電荷靈敏度,而又希望進入采樣的電壓輸出信號具有相同的電壓靈敏度,這中間就要不斷的調整電荷放大器的反饋電容等電路元器件來調整電荷放大器輸出信號的增益[2-3]。同時,在某些測試過程中不同階段要求有不同輸出的靈敏度,要求系統能夠隨著信號的變化相應地自動改變放大系統的增益。而此時,通過改變硬件上的任何元器件,都已經是不可行的了[4]。
為了實現電荷放大器的便捷標定與增益的軟件實時控制,本文通過分析壓電式加速度傳感器調整電路的特點,在前級電荷放大器后增加一個由微控制器控制的可變增益運算放大器組成的可調增益的后級電壓放大電路,來實現加速度傳感器輸出信號的自動標定和增益的可變控制。
1 壓電加速度傳感器的信號調理
電荷放大器可以看作是一個具有深度電容負反饋的高增益放大器,通常它的前級采用了一個運算放大器作輸入級,通常其等效應用電路如圖1所示[5]。

圖1 壓電傳感器與電荷放大器連接的等效電路
放大器的輸出電壓

考慮到運算放大器的開環增益足夠大,則運算放大器的反向輸入端的電位接近于“零”電位;而集成運算放大器的輸入阻抗都很高,放大器的輸入端幾乎沒有分流,電荷q只對反饋電容Cf充電,充電電壓接近于放大器的輸出電壓,即

式中,Uo為電荷放大器的輸出電壓;q為傳感器輸出的電荷量;Cf為電荷放大器的反饋電容。
由式(2)可以看出,電荷放大器的輸出電壓只與輸入電荷量和反饋電容的大小有關,而與放大器開環增益、反饋電阻或電纜電容等均無關。因此,對于特定的傳感器,要調整其輸出靈敏度的大小,必須選擇容量適當的電容作為反饋電容[6]。而在傳感器標定過程中,要改變調理電路輸出靈敏度的大小以及元器件的大小是比較繁瑣的工作;同時對于有些要求在測試過程中改變輸出電壓靈敏度的應用情況,反饋電容的實時改變就更是不可行的了,因為電荷放大器是靠反饋電容Cf來調整增益的,在改變量程時反饋電容Cf上必須沒有電荷,輸出為0 V,否則電容Cf帶走的電荷將給增益增加后的輸出信號帶來很大的誤差。
對于電壓放大電路,由可變增益運算放大器來實現,則可以實時的改變控制電壓的大小來改變放大電路的增益。因此,可以將壓電傳感器輸出的電荷信號經由電荷放大器構成的一級信號放大后,再經過可變增益運算放大電路,實現二級可變增益放大。
2 可變增益的實現
2.1 可變增益的實現方法
可變增益的實現方法,通常采用如圖2所示的反向比例運算電路,是靠改變集成運算放大的反饋電阻Rf或者輸入電阻R來實現,這種方法往往需要外接多路模擬開關改變電阻[7-9]。但這種方法所實現的增益變化連續性差,需要同時改變電阻Rf和R′的大小,因此需要同時改變兩個通道的阻值。

圖2 反向比例運算電路
如果采用由電壓控制的可變增益運算放大器來實現可變增益,則只需改變放大器的控制電壓,即可實現增益的連續變化[10-11]。
2.2 可變增益的作用過程
圖3是能夠實現可變增益控制功能的壓電加速度傳感器信號調理系統的工作原理圖。
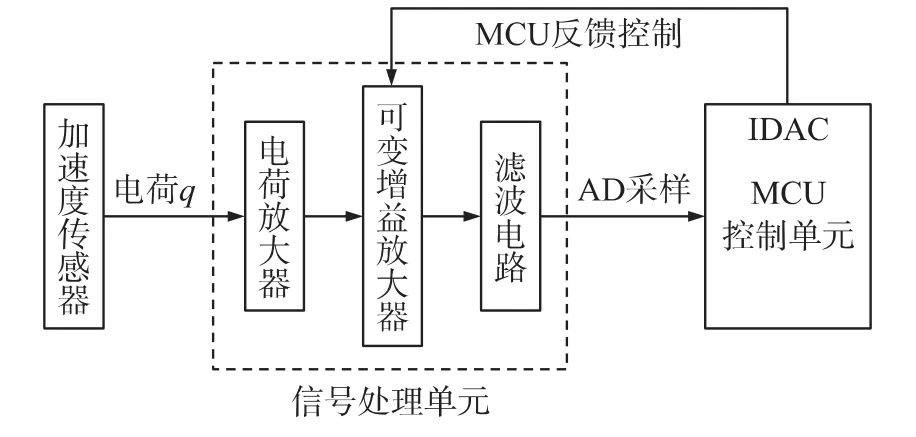
圖3 加速度傳感器信號調理可變增益控制工作原理
壓電加速度傳感器感受到其所受的過載信號以電荷量q輸出,經過電荷放大器將電荷信號q轉化為電壓信號,同時實現信號的初級放大;然后經過可變增益調整部分,將電壓信號進一步放大到適當的范圍,再經濾波電路,輸入到微處理器進行AD采樣。微處理器根據采樣值的大小,控制增益調整部分,從而實現可變增益。
2.3 用可變增益運算放大器實現可變增益控制
可變增益運算放大器可以通過微處理器控制,提供較大的增益范圍,而且可以實現連續調整,在可變增益調理電路中實現增益的連續可調。
AD603是AD(ANALOG DEVICES)公司推出的一種低噪聲電壓控制增益的運算放大器。它提供精確的、可由管腳選擇的增益,且增益是線性變化的,增益變化范圍為40 dB,增益控制轉換比例為25 mV/dB,變化范圍所需時間小于1 μs。此芯片的詳細參數信息及使用方法在此不作過多介紹。
3 硬件電路實現
電路的主要器件采用一個微處理器C8051F410、一個可變增益運算放大器AD603和一個雙通道的集成運算放大器TLC2262和電源芯片構成,其中微控制器C8051F410集成了兩個12位的電流模式數/模轉模塊(IDAC),將兩個電流輸出引腳接到電阻,通過軟件指令控制輸出電流的變化來控制微控制器輸出腳兩端電壓的變化,從而來控制可變增益運算放大器的增益。集成運算放大器中的兩個通道分別用來構成電荷放大器和一個二階的低通濾波器。
可變運算放大器的增益計算如下:

式中,VG是差動式輸入的增益控制電壓(引腳GPOS和GNEG之間的電壓),范圍是-0.5 V~+0.5 V;G0增益起點,與所接的反饋網絡有關,可以是10 dB,20 dB,30 dB。根據前級電荷放大器輸出信號的范圍,此處可以選擇相應的增益調整范圍,例如將引腳FDBK通過一個18 pF的電容接地,則G0=30,則增益可調范圍是+10 dB~+50 dB。
壓電加速度傳感器輸出電荷量q,經電荷放大器進行初級放大,初級放大倍數為固定值,信號經過初級放大一定倍數后進入可變增益運算電路,進行二級放大。二級放大電路的增益控制端由微處理器輸出電流模式數/模轉模塊(IDAC)來控制其大小。
4 可變增益控制的應用
4.1 在加速度傳感器標定系統中的應用
對于傳感器—放大器系統,為了使不同靈敏度的傳感器對同一加速度測量都有相同的輸出,實現歸一化輸出,也為了確定系統輸出的電壓值所代表的實際加速度值,需要對傳感器—放大器系統進行標定[12]。通常的標定過程是先通過理論計算出電荷放大器的反饋電容值Cf,然后在沖擊臺上通過與標準傳感器輸出的加速度值作對比,改變Cf來調整電荷放大器的放大倍數,實現待標定系統的輸出。由于電容大小的不連續性,使電荷放大器的增益經常不能在需要的范圍內。
在可變增益控制系統中,改變系統增益是靠改變可變增益放大器的增益控制腳兩端電壓來實現的,因此電荷放大部分的反饋電容Cf不用改變。本試驗用的壓電傳感器電荷靈敏度范圍分布在0.02~0.065 pC/g,要將傳感器系統的輸出范圍調整到測試 ±30 000 g時輸出電壓在1.6±1.5 V,即每1 V電壓對應于20 000 g過載。電荷放大器反饋電容選擇4.7 nF,則可變運算放大器的增益調整范圍為+11.16 dB ~ +21.40 dB,因此,可變增益運算放大器的增益范圍可選擇為+10 dB~+50 dB,增益計算公式:

標定過程為:先將可變增益放大器的增益控制電壓固定在-0.45 V,即將增益設為12 dB,使可變增益放大器的放大倍數較小,然后給加速度傳感器一次沖擊信號,微控制器通過模/數轉換采集到加速度傳感器的輸出信號,從信號幅值計算此時加速度傳感器的輸出電壓靈敏度,如果不是所需靈敏度,則通過計算程序,計算出可變增益放大器的放大倍數,重新調理可變增益放大器的增益大小,此時的增益大小即為所需要的值,整個標定過程只需一次沖擊測試即可,實現了待測加速度傳感器與標準加速度傳感器輸出的一致。表1和表2分別是在標定傳感器前后信號調理電路的輸出情況,圖4和圖5是用示波器采集的對應輸出電壓波形。
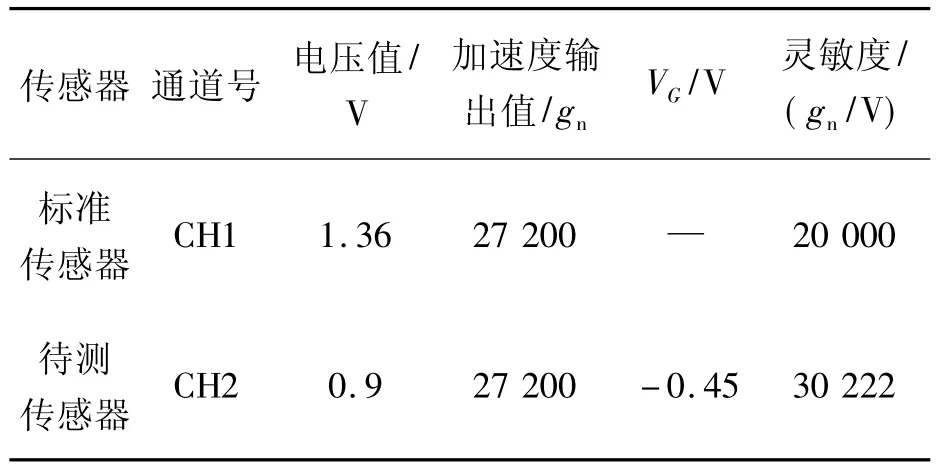
表1 調整增益前的信號輸出
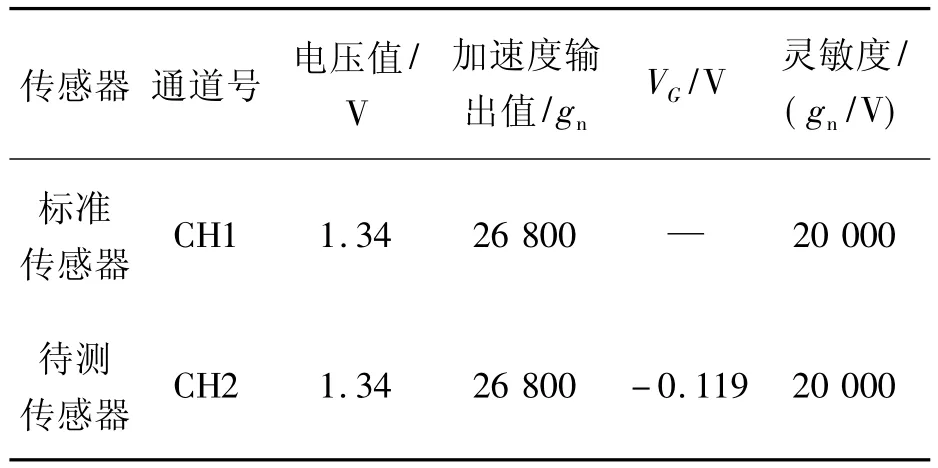
表2 調整增益后的信號輸出
4.2 在多量程測試中的應用
在測試彈體在整個彈道環境中的加速度過載過程中,加速度傳感器在不同階段所受的沖擊過載相差極大,因此,隨著信號的變化相應地自動改變傳感器—放大器系統的增益是很有必要的。
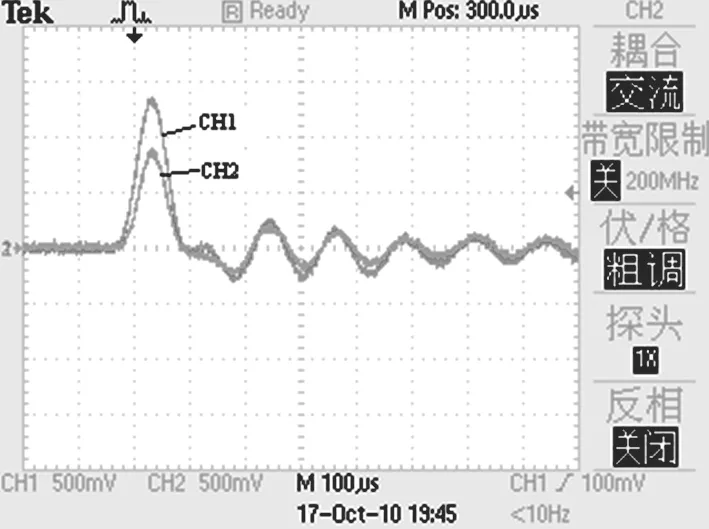
圖4 調整增益前的標定信號輸出波形

圖5 調整增益后的標定信號輸出波形
應用此可變增益控制系統測試了迫彈在侵徹混凝土過程中的加速度過載。彈體膛內的加速度值為2 000 gn~3 000 gn,飛行過程中的加速度值接近于0、侵徹混凝土過程中的加速度值為20 000 gn~30 000 gn,發射過載與侵徹過載的幅值相差近10倍。由此特點,可以采取彈在不同階段采用不同增益的方法,充分利用信號的量程,提高信號的分辨率:標定傳感器系統正常輸出電壓靈敏度為20 000 gn/V,此時可變增益放大器的增益為25.2 dB。當彈在膛內發射時,將放大倍數擴大10倍,可變增益放大器增益為45.2 dB,此時 VG=0.380 V。當微處理器檢測到彈發射過載的下降沿后,開始記錄并存儲加速度傳感器輸出的信號值,經過50 ms后,微處理器再將可變增益放大器的增益調整到標定時設置的25.2 dB,恢復到原來增益的大小,微處理器繼續采樣并存儲加速度傳感器輸出的信號值。存儲測試過程采用了負延時觸發的方式,完整記錄下了整個彈道過程中彈體所受加速度信號的變化。圖6是彈載存儲測試系統記錄下的過載數據,在膛內發射階段過載值比較小,采用電壓靈敏度比較大的增益,可以充分利用信號調理空間,提高膛內小信號的分辨率。圖7是將膛內過載恢復到實際值后的過載曲線。

圖6 測試系統記錄的過載數據曲線

圖7 膛內過載恢復到實際值后的過載曲線
5 結論
在壓電加速度傳感器信號調理電路中采用兩級放大的方法,第一級電荷放大器實現固定增益的輸出,第二級可變增益運算放大器實現可變增益輸出,其中不需要改變任何硬件電路元器件,只需要通過微處理器指令控制其電流模式數/模轉模塊(IDAC)即可實現對整個信號處理電路的可變增益進行軟件實時控制。壓電加速度傳感器輸出信號可變增益運算放大器法可變增益控制在傳感器標定過程中能夠方便、快捷、準確的計算出電壓增益,去除了繁瑣的硬件元件變動;同時其增益的實時可調性也在可變增益信號調理中具有很好的應用性。
[1]Radeka V,Recia S,Manfre PF.JFET Monolithi Preamplifier with Outstanding Noise[J].IEEE Trans on Nuclear Science,1993,40(4):744-749.
[2]董高慶.壓電加速度計的原理、結構及其使用[J].測試技術學報,1997,11(4):52-62.
[3]周恒保,袁慎芳,邱雷.基于PXI總線的多通道程控電荷放大器設計[J].壓電與聲光,2010,32(4):664-666,670.
[4]祖靜,申湘南,張文棟.存儲測試技術[J].兵工學報,1994(4):30-34.
[5]朱蘊璞,孔德仁,王芳.傳感器原理及應用[M].北京:國防工業出版社,2007:86-91.
[6]王慶鋒,吳斌,宋吟蔚,等.PVDF壓電傳感器信號調理電路的設計[J].儀器儀表學報,2006,27(6):1653-1655.
[7]熊繼軍,毛海央,張文棟,等.復合量程微加速度計的研究[J].傳感技術學報,2006,19(5):2200-2203.
[8]周勝海,王棟臣,馬建中.可變增益放大器的實現方法[J].儀表技術與傳感器,2001(7):32-34.
[9]伍乾永,陳彬.基于單片機的可控增益放大器設計.內江科技[J],2008(4):101-102.
[10]王小娟.數字式可變增益放大器的實現[J].儀表技術,2008(7):7-8.
[11]鄭德智,王帥,樊尚春.渦街流量傳感器信號處理方法研究[J].傳感技術學報,2009,22(1):80-84.
[12]王文軍,胡時勝.高g值加速度傳感器的標定[J].爆炸與沖擊,2006,26(6):568-571.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
