地鐵隧道通風排煙風機排氣量監測系統
2011-10-09 09:46:16張述杰王進丹
電子設計工程 2011年24期
張述杰,王進丹
(沈陽航空航天大學 遼寧 沈陽 110136)
地鐵隧道中通風排煙設施的風機及其相關控制器需要定期檢查,設施是否保持良好的性能是地鐵安防至關重要的問題。隧道狹長、設備高置、人工檢修與維護困難,該系統便會很好地解決以上難題。由公式E=V風×S面(V風表示風速,S面表示隧道橫截面積,E表示排氣量)可知,排氣量的測量就是對風速的測量,風速的測量需要解決以下兩個問題:1)超聲波傳感器結構的搭建,合理配置傳感器架構才能準確測量風速。2)如何消除測量過程中產生的誤差,以提高測量精度是至關重要的[1]。
1 原 理
系統采用發射端一只超聲波傳感器S,接收端兩只超聲波傳感器R1、R2構成等腰三角形結構,如圖1所示。其中R1、R2平行于隧道方向,設風速為V風。
這里假設風速方向為R2→R1,則:
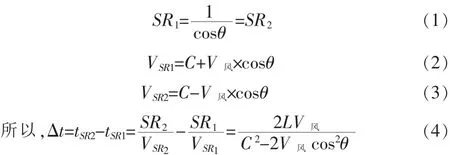
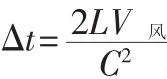
圖1 超聲波傳感器構架圖Fig.1 Structure diagram of ultrasonic sensors

由公式(5)可知,只要精確測量出時間差Δt,就可以計算出風速V風,從而得出排氣量E。
2 系統硬件電路的設計
系統結構圖如圖2所示。
系統的核心處理器采用ARM7系列的LPC213x,片上資源比較豐富,適合本系統[2]。發射電路:系統有ARM產生40 kHz的方波信號,一路經過時鐘電路處理得到相同頻率的正弦信號,經過發射電路的放大驅動超聲波發射器發射超聲波信號,另一路方波信號經過倍頻電路將信號放大到4 MHz用以給A/D、FIFO提供時鐘信號。接收電路:由超聲波接收器接收超聲波信號,經接收電路放大濾波,經A/D、FIFO采集超聲波信號,ARM從FIFO讀取數據并結合溫度補償計算出排氣量,得到的結果由485總線送到上位PC機。
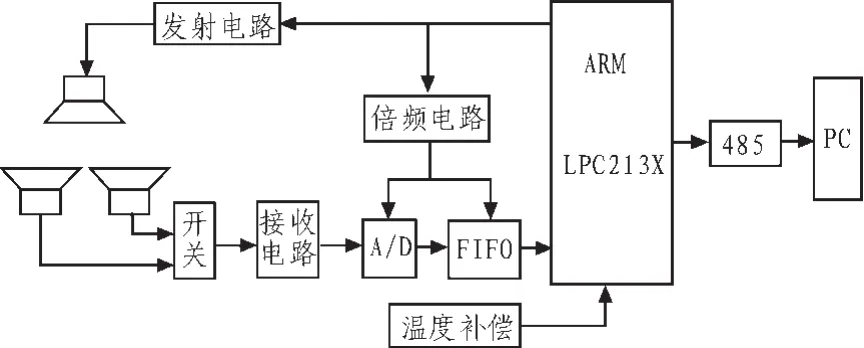
圖2 地鐵隧道通風排煙風機排氣量監測系統結構圖Fig.2 Structure diagram of detection system in subway tunnel exhaust fan displacement
2.1 超聲波放射端電路
發射端電路如圖3所示,ARM產生的40 kHz的方波信號送入L、C網絡得到40 kHz的正弦波信號,送入由運算放大器構成的放大驅動電路,提高驅動能力,驅動超聲波發生器產生連續的超聲波信號。
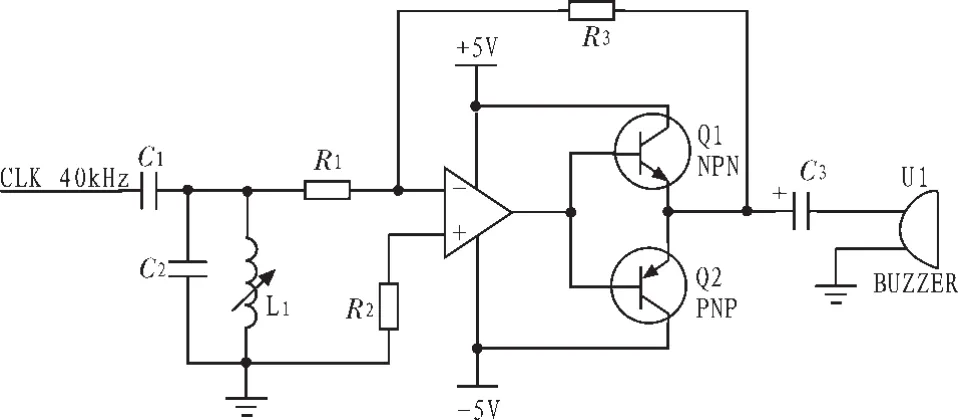
圖3 發射端電路圖Fig.3 Circuit diagram of transmitting terminal
由于系統采要利用兩路信號的相位差得到時間差進而得到排氣量,所以統一時鐘可以精確地同步信號采集處理,因而A/D、FIFO的采樣時鐘由ARM同一時鐘產生的40 kHz信號經倍頻電路提供。倍頻電路采用高速鎖相環將ARM產生的40 kHz信號倍頻到4 MHz。
2.2 超聲波接收端信號預處理電路
系統接收端預處理電路如圖4所示。

圖4 接收端信號預處理電路圖Fig.4 Circuit diagram of receiver signal preprocessing
超聲波經過空氣傳播到接收端時,信號一般為mV級別,并與噪聲信號疊加到一起[3]。為了給A/D提供合適的輸入電壓并將初步濾除噪聲干擾,這里采用兩個運算放大器組成的放大、帶通濾波電路,第一個運算放大器設計為LPF,第二個設計為HPF,得到中心頻率為40 kHz的帶通濾波電路。
2.3 超聲波接收端信號采集電路
系統接收端信號采集電路如圖5所示。
經過預處理電路的信號送到A/D轉換器進行模數轉換,本系統A/D轉換器采用TLC5510A,是美國TI公司生產的8位高阻抗并行的模數轉換器,單電源+5 V供電,最大采樣頻率20MSPS,輸入量程2~4 V,TLC5510A采用半閃速結構及CMOS工藝,大大減少器件中比較器的數量,并在高速轉換的同時能夠保持較低的功耗,適合本系統的設計。高速采樣后的數據直接提供給處理器處理,處理器處理不及時會造成數據丟失,所以先將數據先送入FIFO,處理器從FIFO中讀取數據,處理后的數據最后經過串行通信總線送到上位機[4]。
3 系統軟件設計
3.1 系統軟件設計流程圖
系統軟件設計包括:超聲波發射子程序、接收子程序、誤差處理子程序、排氣量計算子程序及數據串行通信子程序,程序流程圖如圖6所示。
系統由發射子程序控制發射電路發射超聲波信號,延時一段時間使超聲波信號趨于穩定后分兩次接收兩路超聲波信號,將接收到的信號經過誤差處理子、排氣量計算子程序得到排氣量結果,最后通過串行通信送到上位機,其中誤差處理需要使用軟件算法,可以有效提高測量精度[5]。本系統采用哥拉布斯與改進的相關算法結合的方法,有效剔除異常數據及高斯白噪聲的干擾,很好地提高了測量精度。
3.2 信號處理算法
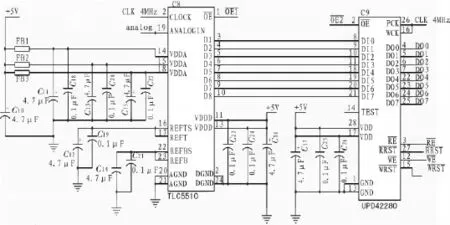
圖5 接收端信號采集電路圖Fig.5 Circuit diagram of receiver signal acquisition
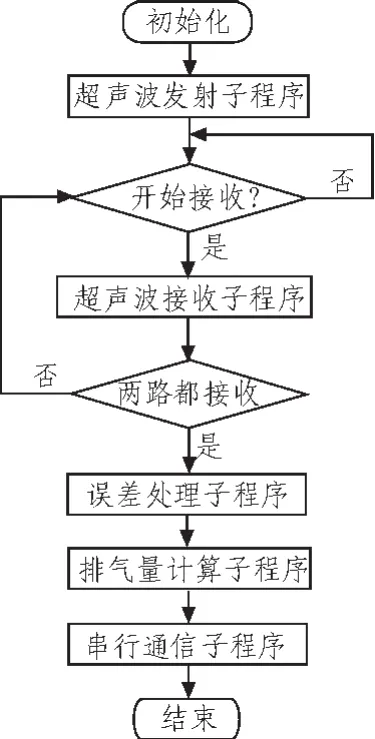
圖6 軟件設計的流程圖Fig.6 Flow chart the software design

由公式(6)可以看出,測量風速的精確度主要由 Δt、C、L 3個因素決定。
C:超聲波傳播速度C=331.5+0.607T,可以看出C主要與溫度T有關,在系統設計中加入溫度補償,可以減少由C產生的誤差。
L:主要由傳感器的工藝制作有關,只能盡量提高工藝制造水平,另外,在理想無風的條件下,Δt=0,如果測試時不為零,可以在軟件中加入補償,以消除這部分誤差。
Δt:這是本系統的核心部分。要準確測量時間差,需要剔除誤差,誤差主要包括3類:系統誤差、隨即誤差、過失誤差,其中過失誤差對整個系統的測量精度影響最大,在進行數據處理時,首先應該剔除的也是過失誤差[6]。本系統采用改進的格拉布斯準則對采樣數據進行處理。
格拉布斯準則[7]:
g(n,α)是為與n、α有關的系數,可以通過查表得到相應的值,α為危險系數,也可以說是出現錯誤的概率,有3個值:1%,2.5%,5%,具體取值要看實際情況。
接收到的數據經過格拉布斯法則濾除過失誤差后,再應用最小二乘法非線性校正法,進一步消除系統誤差和隨機誤差,最終擬合成一個周期的有用信號。
Matlab驗證算法仿真結果:
由表1可見,精確度都在1%以下,符合設計要求。
圖7 兩路信號處理對比圖Fig.7 Contrast figure of Two signal processing

表1 仿真結果Tab.1 Simulation result
4 結 論
地鐵隧道中的風速一般為20 m/s以下,試驗證明,該系統適合地鐵隧道中排煙風機排氣量的監測,系統結合的軟件算法很好地消除了測量過程中的誤差,使得測量結果更加精確。
[1]TANG Hui-qiang, HUANG Wei-yi, LI Ping, et al.Ulrasonic wind velocity measurement based on DSP [J].Journal of Southeast University(English Edition),2005(5):20-23.
[2]周立功,張華.深入淺出ARM7-LPC213x/214x[M].北京:北京航空航天大學出版社,2005.
[3]李廣峰,劉枋,高勇.超聲波流量計的高精度測量技術[J].儀器儀表學報,2001(12):644-647.
LI Guang-feng, LIU Fang, GAO Yong. Accurate measurement technology of the ultrasonic Flowmeter[J].Chinese Journal of Scientific Instrument,2001(12):644-647.
[4]袁丁,余貴珍.基于高速A/D轉換器的視頻數據采集系統[J].電子設計工程,2011(1):171-174.
YUAN Ding,YU Gui-zhen.Video acquisition system based on high speed A/D converter[J].Electronic Design Engineering,2011(1):171-174.
[5]周杏鵬,仇國富,王壽榮.現代檢測技術[M].北京:高等教育出版社,2004.
[6]趙懷林.微機測量與數據誤差處理方法 [J].電測與儀表,2002,5:33-36
ZHAO Huai-lin.The research on computer measuring and data errorprocessing[J].ElectricalMeasurementandInstrumentation,2002(5):33-36.
[7]劉瑛,王超,魏功,等.臨床室內質控哥拉布斯法的改進[J].河南科技大學學報:自然科學版,2006(2):75-78.
LIU Ying, WANG Chao.WEI Gong, et al.Clinical quality control method to improve grubbs test[J].Journal of Henan Univrsiry of Science and Technology:Natural Science,2006(2):75-78.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
西南交通大學學報(2016年4期)2016-06-15 20:29:37
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21