高效智能化太陽能充電系統的研究
2011-10-09 09:45:58梁曉鷗廖俊必
電子設計工程 2011年23期
關鍵詞:單片機
梁曉鷗,廖俊必,吳 瑞
(四川大學 制造學院測控系,四川 成都 610065)
太陽能光伏組件是利用半導體材料制成的一種可以直接將太陽輻射能量轉化為直流電能的裝置。在使用上不受地域限制,只要有陽光的地方就可以實現,同時太陽輻射到地球上的總能量充足,是取之不盡的自然資源,在使用中對環境沒有污染。但是太陽能的能量密度低,光伏組件效率難以提高等,都為其推廣普及帶來了一定的困難。作為一種新型的具有多種優點的能源,光伏能源將會更加廣泛地被使用[1]。
筆者設計了一套能夠完成智能化充電用電管理的太陽能供電系統,能夠獨立完成光伏組件智能供電,蓄電池充電,并對負載進行供電,可以工作在浮充狀態下,通過單片機實現智能化控制,通過指示燈顯示充電狀態,從而實現高效智能化管理系統。
1 原理與設計
1.1 系統原理
太陽能電池在使用中,通常根據系統設計的需求功率電壓電流等參數進行串并組合構成太陽能電池組件;由于太陽能電池自身的輸出特性并不能保持恒定,會隨著光照、溫度、角度等條件的變化而變化,所以在太陽能輸出端需要加一個轉換電路,采用最大功率跟蹤的方法,隨時調整電路的輸出功率,實現高效利用有限的太陽能資源;在充電過程中時刻監測電路中太陽能組件輸出電壓、電流、充電電流、蓄電池電壓,蓄電池溫度等參數,當蓄電池電壓達到充電終止電壓時,及時斷開充電回路,防止蓄電池過充,或者當蓄電池電壓低至放電截止電壓時,及時斷開用電回路,防止蓄電池過放。系統各個模塊設計框圖如圖1所示。
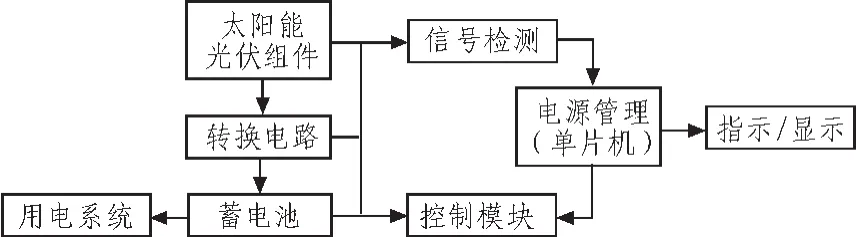
圖1 智能太陽能供電系統結構Fig.1 System block diagram
1.2 MPPT最大功率跟蹤控制
太陽能光伏組件是一種特殊的電源器件,它既有電流源的特性,也有電壓源的特性,其輸出的電壓電流與光照強度、溫度等有關,在一定溫度下,其輸出電流隨著光照強度的增強而大大增加,輸出電壓則基本不變,伏安特性曲線如圖2所示。
當給太陽能電池接上負載,其負載線與特性曲線的交點與坐標軸圍成的面積即表示此刻的輸出功率。當該面積最大時,即表示負載與太陽能電池剛好匹配,可以輸出最大功率。由于太陽能電池的伏安曲線是隨著外部環境變化的,即理論上最大功率點在曲線上并不固定,MPPT實際上就是一個負載的動態匹配過程,以尋找到最大功率點,目前常用的控制方案有擾動觀察法、增量電導法、滯環比較法、模糊控制法等[2-3]。其中擾動觀察法,電路結構簡單,容易實現。
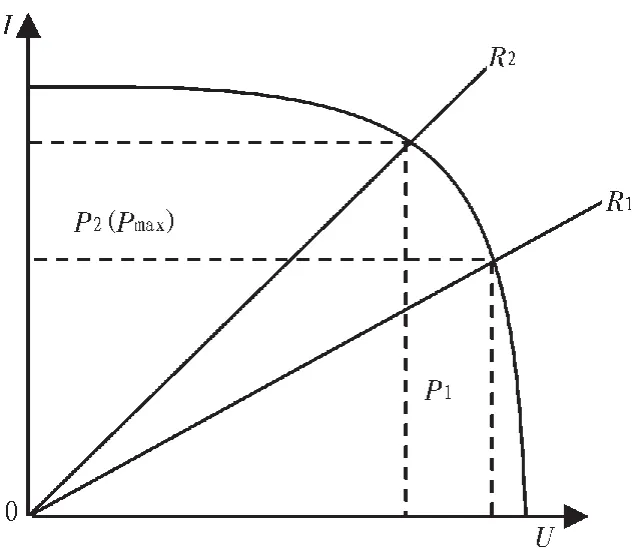
圖2 太陽能電池伏安特性與負載線及功率關系Fig.2 Volt-ampere characteristics and load line
擾動觀察法的原理是通過給定一個方向的電壓擾動,然后測量在這個擾動發生后的輸出功率,與前一發生擾動時刻的功率進行比較,如果擾動后的功率增大了,那么繼續沿著這個擾動的方向給予電壓增量;如果擾動后的功率減小了,那么就與之前擾動方向相反,給予新的擾動,再不斷循環這個過程,直到尋找到最大功率點[4]。基于降壓式變換電路(BUCK)電路的MPPT最大功率跟蹤方法,是通過控制器輸出一個PWM信號,來控制電路中MOSFET的導通時間來調整輸出的。D為場效應管的導通占空比,ΔD表示占空比的調節時間,在這種控制方法下,輸出功率將在最大功率點附近波動,波動的幅度,取決于ΔD的選擇,在同一初始 D值下,ΔD越大,波動越大,但是系統從初始化到尋找到最大功率點的時間越短。
1.3 系統硬件電路設計
BUCK電路是一種降壓型DC-DC變換電路,通常由功率晶體管、儲能電感、續流二極管及濾波電容構成,如圖3虛線框示。
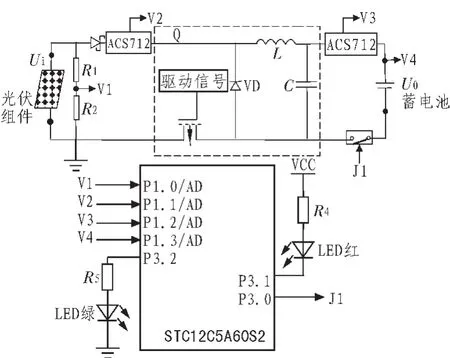
圖3 系統硬件電路設計Fig.3 System circuit design
Q為功率晶體管,在一個開關周期T內,其導通時間為ton,導通占空比為D,通過LC濾波器,其輸出電壓平均值為VDSton/T。Q導通時,加在電感L上的電壓為VDS-VSAT-VO恒定,流過電感L的電流線性增大至I1,同時向負載供電和向電容充電;Q關斷時,電感兩端電壓極性反相以保持流過電感的電流不變,此時二極管VD導通,電感中的電流開始線性下降至I2,則I1與I2的中點電流值,即為輸出的IO。當I2不為零時,BUCK電路工作在電流連續狀態下[5]。單片機自帶的PWM信號輸出功能,可以很方便的進行占空比調節,從而控制Q的導通時間,改變電路輸出。單片機輸出的PWM信號幅值不足以驅動場效應管導通,采用直接法驅動電路進行驅動,如圖4所示。
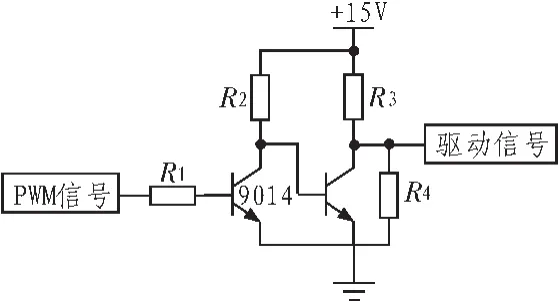
圖4 驅動電路Fig.4 Driving circuit
電流檢測采用霍爾電流傳感器ACS712,該電流傳感器可探測到電流的大小并轉換成線性電壓輸出,其導通電阻大約1.2 mΩ,具有較低功耗。本系統的核心控制器選用STC12C5A60S2單片機。該單片機內部集成了2路PWM,8路高速10位A/D轉換器,完全滿足本系統的需要。充電回路檢測光伏組件輸出電壓、輸出電流、蓄電池電壓、蓄電池充電電流4個信號,分別通過P1.0~P1.3輸入到單片機的AD轉換端口,測得準確的電壓值,并計算出相應的電流值,監測回路狀態,防止蓄電池過放或者過充。回路中采用具有較低壓降的肖特基二極管防止負載蓄電池向太陽能板反向充電。
充電回路采用常開型固態繼電器控制,當監測到蓄電池處于未充滿的狀態下,則閉合固態繼電器,為蓄電池充電,當監測到V4到達蓄電池充電截止電壓時,斷開繼電器,防止蓄電池過充,另一方面V4信號的檢測還反映出蓄電池的使用情況,當蓄電池電壓低至放點截止電壓時,管理單元發出控制信號,斷開用電回路,防止蓄電池過放,損壞電池。在系統中接入分別接入兩個發光二極管,當繼電器閉合時,點亮紅色LED,表示正在充電;當蓄電池充滿時,點亮綠色LED,指示充電完成。
1.4 電源管理方案
本系統待充電電池為單節磷酸鐵鋰電池。它是一種新型的鋰離子電池,標稱電壓3.2 V、終止充電電壓3.6±0.5 V、終止放電壓2.0 V。電源管理模塊需要實現蓄電池過充過放保護,太陽能板與蓄電池組的匹配調整,電路充放電狀態指示。
美國科學家馬斯提出并用實驗證明了如果一個電池在充電過程中保持相等而微量的不斷氣化,那么充電電流的曲線為一條指數曲線。因此,越接近該充電曲線的充電方式,越能夠有效地減小蓄電池的極化現象并縮短充電時間[6]。采用變電流階段充電法,在充電初始階段采用MPPT最大功率跟蹤方法,盡可能多的獲取光伏組件的輸出功率,充電末期時減小充電電流,保護蓄電池。
1)在充電開始前,檢測蓄電池的狀態,若低于蓄電池的過放電壓,則調節PWM信號,采用一個較小的電流對蓄電池進行預充一段時間。
2)此后進入普通充電階段,采用最大功率跟蹤方法,使太陽能電池板輸出盡可能大的功率,并檢測蓄電池電壓和充電電流。隨著蓄電池逐漸充滿,電壓逐漸升高,直電池電壓接近3.6 V。
3)此時,蓄電池基本已經充滿,其充電接受能力下降,如果仍按前一充電狀態下的電流充電,會造成過量析氣,損壞電池或者造成虛滿現象,此時調整PWM信號,逐漸減小充電電流,直到電池電壓達到充電截止電壓,最終完成充電。
1.5 系統軟件設計
本智能太陽能充電管理系統的核心控制器選用STC12C5A60S2單片機。該單片機是具有高速,低功耗,強抗干擾能力的新一代8051單片機,速度比傳統8051快8~12倍,128字節片內RAM數據存儲器,60 k程序存儲空間,36個通用I/O口,工作電壓3.3~5.5 V。將A/D轉換與PWM信號輸出都集成在了單片機內,方便系統設計,簡化電路,提高系統的集成化。開機后,先進行系統初始化,設定系統工作狀態,導通占空比D及調整量ΔD,輸出 PWM信號,使 BUCK電路開始工作,打開A/D轉換器,采集此刻電路的參數,包括充電電流電壓,電池溫度等,計算出當前的輸出功率;然后,對PWM信號進行調整,再進行電流電壓數據采集,功率計算,與前一時刻輸出功率進行比較,不斷調整直到尋找到最大功率點。由于MPPT方法在天氣快速變化的時候跟隨性差,甚至造成誤操作,所以設計數據采集設每5 s進行一次,每次采樣取10次AD轉換結果求取平均值。
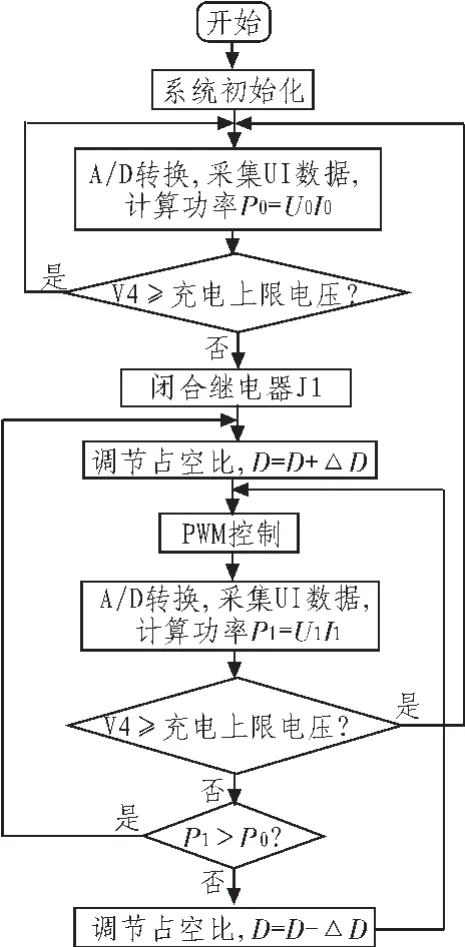
圖5 軟件程序流程圖Fig.5 Flow chart of software
2 實 驗
實驗太陽能板性能最大短路電流1.94 A。在晴朗天氣條件下,測試數據如表1、圖6所示,充電效率提高20%~30%。
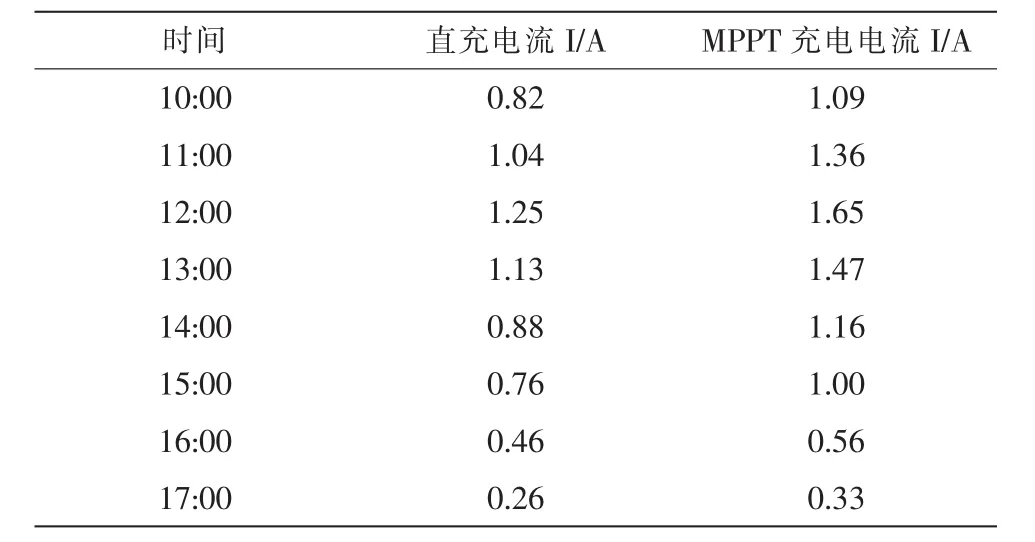
表1 測試數據Tab.1 Test data
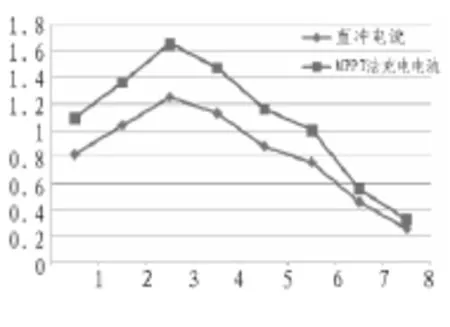
圖6 測試數據Fig.6 Test data
3 結 論
文中設計了一種能夠自動完成智能化充電控制的太陽能-蓄電池充電管理系統。采用帶AD轉換,PWM信號輸出功能的高速STC12C5A60S2單片機。實驗表明,利用該方法進行充電,可以提高電池的充電效率,并且起到保護蓄電池的作用,是一款高效智能化充電管理系統。
[1]鄧長生.太陽能原理與應用[M].北京:化學工業出版社,2010.
[2]盧琳,殳國華,張仕文.基于MPPT的智能太陽能充電系統研究[J].電力電子技術,2007,4(2):96-98.
LU Lin,SHU Guo-hua,ZHANG Shi-wen.Research on max power point tracking for solar-electric charging system based on Micro-Controller[J].Power Electronics,2007,4(2):96-98.
[3]陳進美,陳巒.光伏發電最大功率跟蹤方法的研究[J].科學技術與工程.2009,9(17):4940-4945
CHEN Jin-mei,CHEN Luan.Research on the method of max power point tracking for solar PV[J].Science Technology and Engineering,2009,9(17):4940-4945.
[4]吳華波.基于擾動觀察法的最大功率跟蹤的實現[J].電測與儀表,2010(11):42-46.
WU Hua-bo.Realization of perturbation and observation based on maximum power point tracking algorithm[J].Electrical Measurement&Instrumentation,2010(11):42-46.
[5]U.S.,Abraham I.Pressman.開關電源設計[M].2版.王志強,譯.北京:電子工業出版社,2005.
[6]王堅.慢脈沖快速充電控制電池極化的研究 [J].電池,2003(12):366-368.
WANG Jian.The fast charge with slow pulse on controlling the polarization of battery[J].Battery Bimonthly, 2003(12):366-368.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36