模糊自適應PID控制方法研究與仿真
2011-10-16 08:13:28李春光孫朝霞
長春師范大學學報 2011年2期
李春光,孫朝霞
(廈門理工學院計算機科學與技術系,福建廈門 361024)
模糊自適應PID控制方法研究與仿真
李春光,孫朝霞
(廈門理工學院計算機科學與技術系,福建廈門 361024)
對于非線性、時變性的系統來講,傳統PID控制難以達到滿意效果。利用模糊推理的方法實現對PID參數的在線自動整定,并且在Matlab軟件環境下進行了研究與仿真。仿真結果表明,參數自適應模糊PID控制能使系統控制響應快、控制穩定,且具備了良好的動態性能。
模糊自適應;PID控制;Matlab仿真
在許多實際的工業過程中,由于普遍存在的非線性、參數時變性和模型的不確定性,使得常規的PID控制難以取得預期的效果。而模糊控制對數學模型的依賴性弱,不需要建立過程的精確數學模型,只要把模糊規則以及評價指標、初始PID參數等作為知識存入知識庫中,即可根據控制系統的實際情況,通過知識及模糊推理實現對PID參數的最佳調整。這樣既實現了PID控制的高精度,又具有了靈活性和自適應性,是解決實際系統控制問題的有效途徑。采用Matlab仿真器對模糊自整定PID參數控制系統進行仿真,可快速、方便地驗證各種規則和參數的有效性。
1 模糊自適應PID控制方法的原理
過程控制中的常規PID控制算法具有計算量小、實時性好等優點[1]。如果針對控制過程建立了適當的數學模型,只要設置KP、KI、K D這幾個控制參數,就可以實現PID控制的作用。但對于非線性、大延遲性等具有諸多不確定因素的系統,其控制效果欠佳。如果要應用于此類系統,則需根據不同工況對常規PID控制器的KP、KI、K D進行調整,也就是說,PID控制器要具有優良的自整定性才可以更好地運用于實際的工況。應用模糊控制算法來實現對PID參數的自動整定是一種比較有效的解決方案,即利用模糊推理規則,用實測值與設定值間的誤差以及誤差變化率作為系統的輸入,對PID調節器的KP、KI、K D參數進行調整,從而實現對控制對象的實時控制[2]。其控制系統結構圖如圖1所示。

圖1 模糊自適應PID控制器結構圖
2 模糊自適應PID控制方法的實現
模糊PID控制器系統的核心是模糊推理器,它決定了控制系統的精確性[3]。模糊推理器的功能是在系統運行過程中找出PID調節器的輸入KP、KI、K D與誤差e及誤差變化率ec之間的模糊關系,并且在系統運行過程中,不斷檢測誤差e與誤差變化率ec,根據模糊控制策略對KP、KI、K D進行在線修正,從而滿足不同控制環境變化的需求,以獲得良好的響應控制和動態控制性能。
2.1 模糊推理器的結構
如模糊控制系統機構圖1所示,將誤差e和誤差變化率ec作為模糊推理器的兩項輸入參數、將三個參數KP、KI、K D作為控制器的輸出,提供給PID調節器,作為PID的在線修正參數。
2.2 模糊推理器的隸屬度函數
設E為輸入誤差e的語言變量,EC為誤差變化率ec的語言變量。{-3,-2,-1,0,1,2,3}為E和EC的論域,它們的模糊子集為{NB(負大),NM(負中),NS(負小),ZO(零),PS(正小),PM(正中),PB(正大)}。KP為比例系數KP的語言變量,KI為積分系數 KI的語言變量,K D為微分系數 K D的語言變量。它們的模糊子集為{NB(負大),NM(負中),NS(負小),ZO(零),PS(正小),PM(正中),PB(正大)}。圖 2,圖 3,圖 4,圖 5 為分別為 E、EC以及三個參數的隸屬函數曲線,其量化范圍分別為(-013,013),(-0106,0106),(-3,3)。
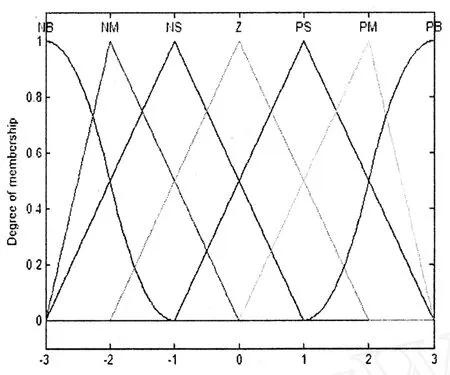
圖2 誤差e及變化率ec的隸屬度函數
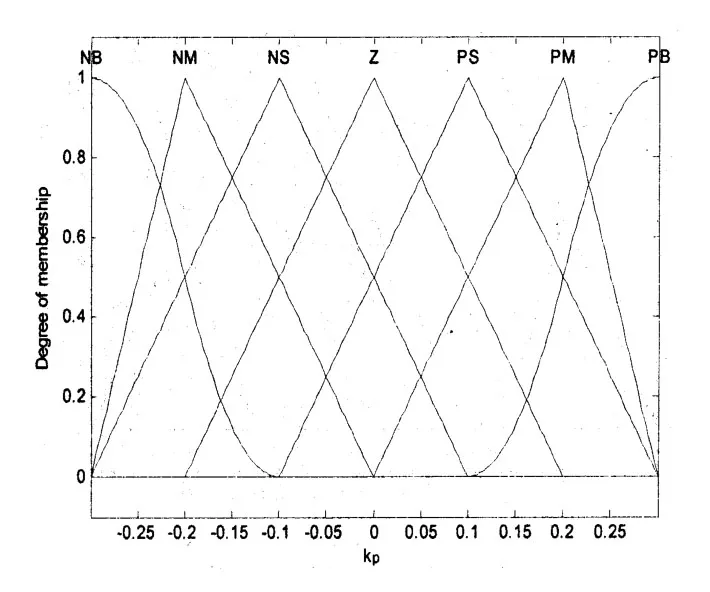
圖3 KP的隸屬度函數
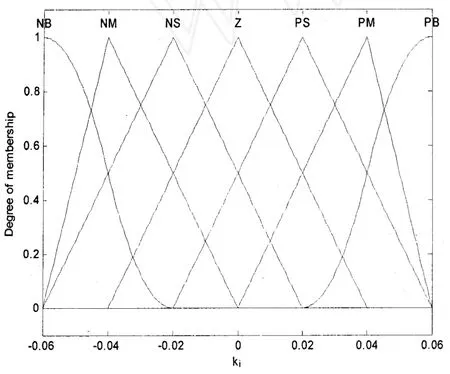
圖4 Ki的隸屬度函數
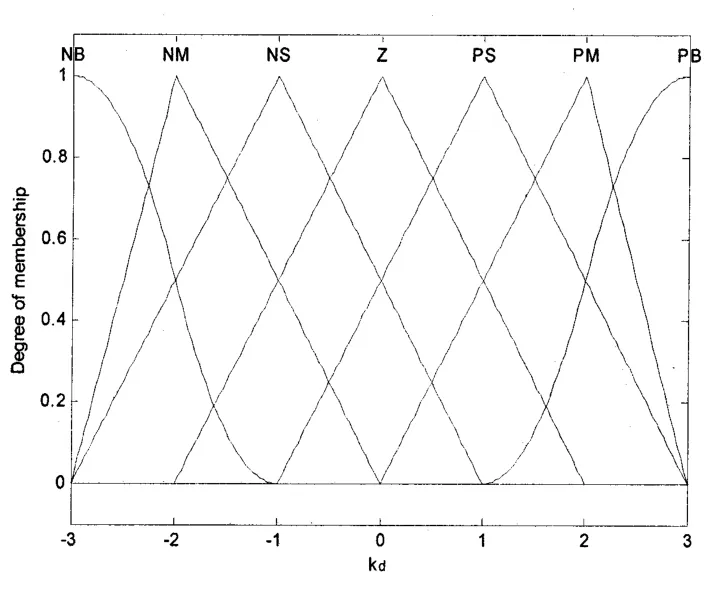
圖5 Kd的隸屬度函數
2.3 建立模糊控制規則
模糊控制器應首先根據專家經驗知識庫來建立PID的三個參數與誤差e及誤差變化率ec之間的模糊關系,再通過系統運行過程中不斷對e和ec進行檢測,由模糊控制規則對PID三個參數實行在線自適應調整[4]。
PID算法的三個參數會影響系統的穩定性、響應速度、超調量以及穩態精度[5]。在系統運行過程中對不同的誤差e及誤差變化率ec,參數KP、KI、K D的自適應調整規則是:(1)如果誤差e較大情況,既為了加快系統的響應速度,又考慮微分過飽和而致使控制作用超出范圍,應取較大的KP和較小的K D,KI一般設定為0;(2)如果誤差e和誤差變化率ec為中等情況時,既要保證一定的響應速度又要有小的超調量,KP和K D的取值應較小,KI一般設定為中等大小;(3)如果誤差e較小情況時,為了使系統有較好的穩定性,應增大KP、KI的值,K D的值要視誤差變化率ec的大小而定,ec大則K D小,ec小則K D大。
因此,要根據不同時刻KP、KI、K D這幾個調節作用的強弱及協同關系來確定特定的控制規則,從而實現自動整定[6]。根據其作用原理與操作經驗設定的模糊整定控制規則見表1。
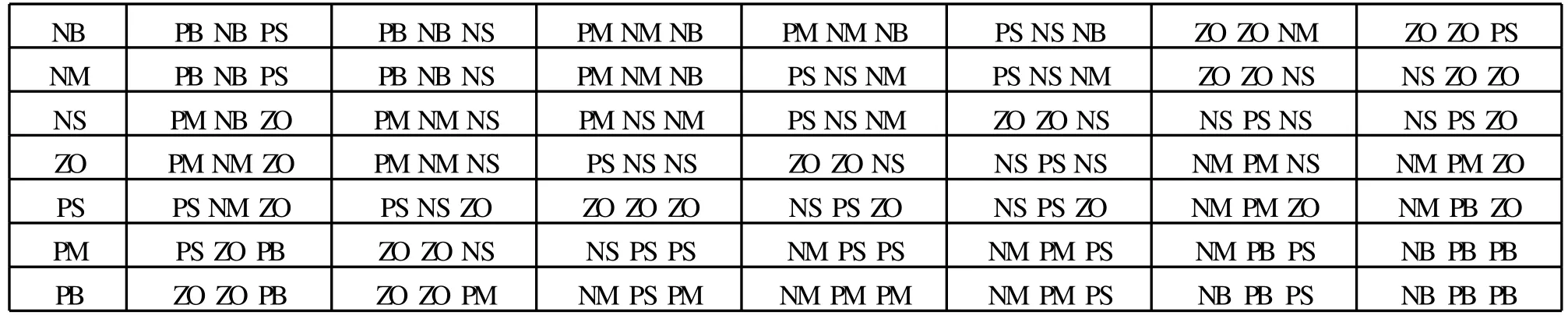
表1 模糊整定規則表
2.4 編輯模糊控制器
應用Matlab R2007中的FIS對模糊控制器進行編輯,建立FIS文件用于組建控制系統時調用。FIS文件的文件名為Fuzzpid1fis,其類型為Mamdani,推理規則為min,合成規則為max,解模糊規則為centroid,并設置二個輸入以及三個輸出變量。在函數編輯器窗口分別設定e、ec以及 KP、KI、K D的隸屬度函數和函數的量化范圍。在規則編輯窗口根據模糊整定規則表設置輸入、輸出變量所對應的模糊整定規則。模糊系統fuz2 zpid1fis的結構如圖6。
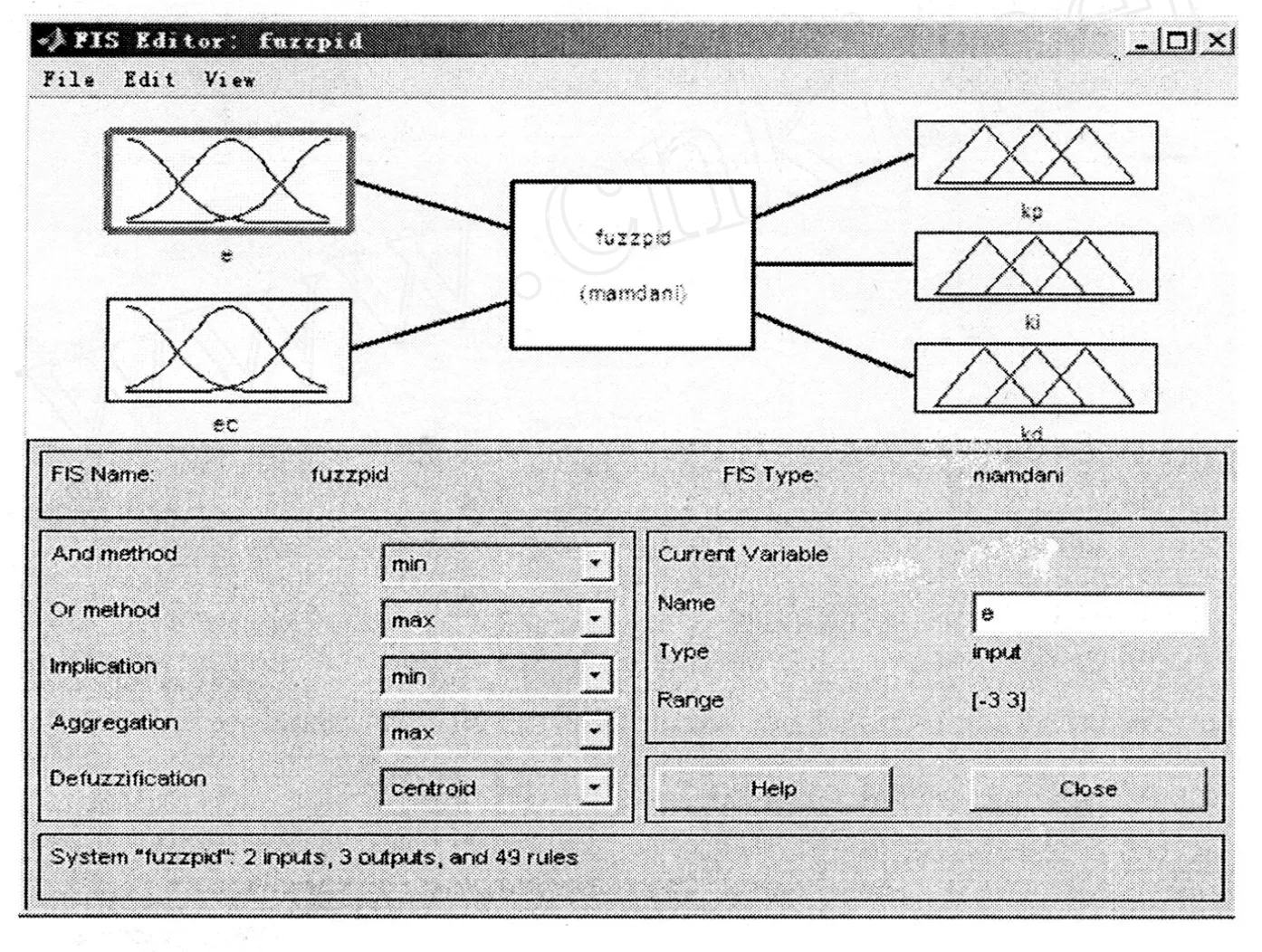
圖6 模糊系統fuzzpid1fis的結構
3 應用MAT LAB對模糊自適應PID控制方法進行仿真
為了驗證該方法的有效性,取某工業過程控制對象為例,其傳遞函數為:

采用Matlab R2007所提供的環境進行仿真試驗,輸入信號為單位階越信號,采樣時間為1ms,KP、KI、Kd的初始值分別為0156,01001和01255;在FIS中設定模糊控制器的調用方法,將FLC在工作空間中輸出,再由FIS文件調用。按照模糊整定規則可得KP、KI、Kd的修正值,模糊自整定控制器的實際調節量即為輸入至PID的參數與初始值之和。在300ms的時候,給控制器加入一個幅度為110的干擾,其仿真控制結果與傳統PID控制效果的比較見圖7與圖8。
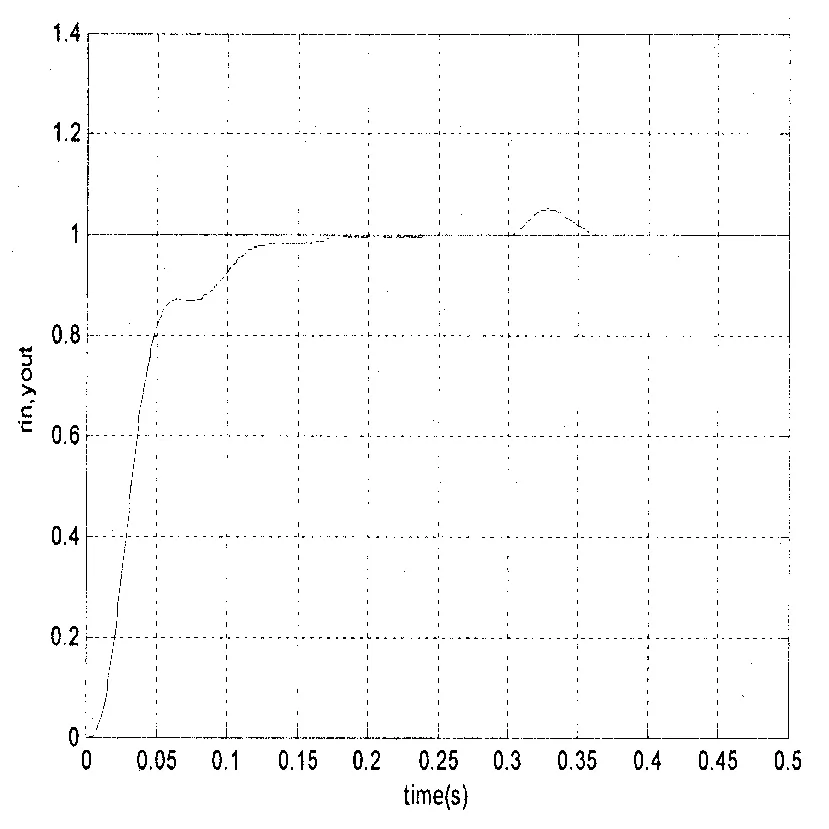
圖7 傳統PID算法仿真
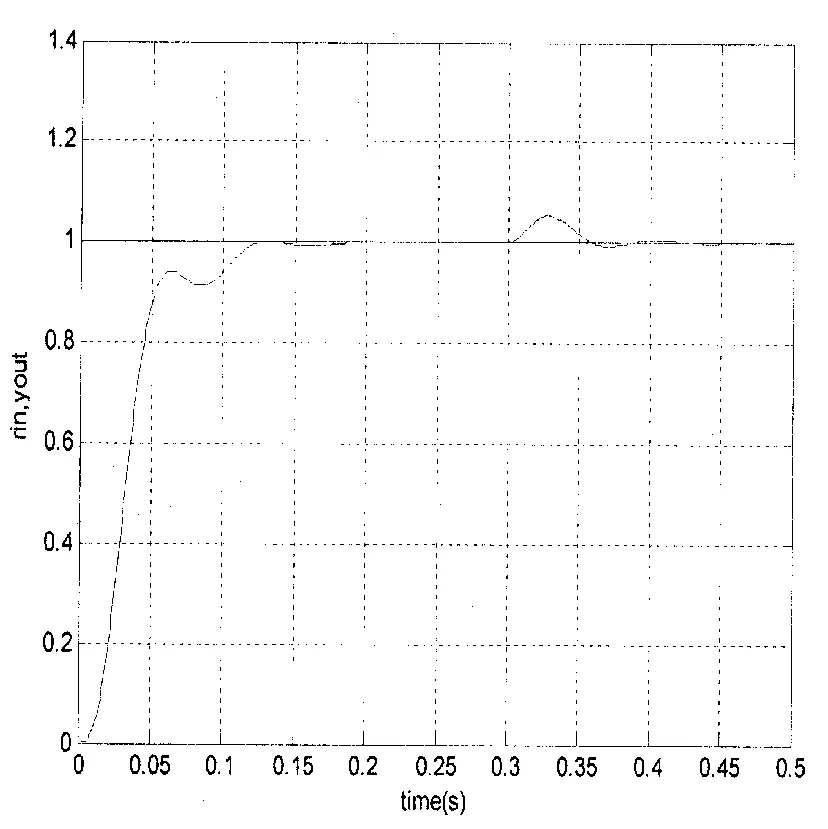
圖8 模糊自整定PID算法仿真
由圖8與圖7所仿真的兩種控制效果可見,模糊自整定控制器的響應時間短、超調量小,控制效果較好,自整定能力強。但在有外來擾動進入時有輕微的震蕩,在今后的研究中仍需加以改進。
4 結語
經典控制理論中最常用到的PID控制具有原理簡單、易用等優點,但如果將其用于非線性、實時性要求高的復雜系統中,效果欠佳。模糊控制算法可在傳統PID控制的基礎上實現模糊自整定,該技術的計算量小、靈活度高且易于實現。本研究利用Matlab R2007進行仿真試驗,結果表明模糊自整定算法可以發揮傳統算法與模糊控制的優點,較好地適應控制過程中被控制對象的變化以及外來的擾動。在系統參數發生改變時,具有較好的自整定能力,其控制響應時間、超調量等參數較傳統PID控制效果有明顯改善,這在實際的過程控制中具有參考價值。
[1]劉金餛.智能控制[M].北京:電子工業出版社,2009.
[2]陶永華,尹怡欣,葛蘆生.新型PID控制及其應用[M].北京:機械工業出版社,1998.
[3]J.J.Hopfield,D.W.Tand.Neural computation of decision in optimization problems[J].Biological Cybernetics,1985,52:141-152.
[4]劉金餛.先進PID控制MAT LAB仿真[M].北京:電子工業出版社,2004.
[5]薛定宇.控制系統計算機輔助設計[M].北京:清華大學出版社,2006.
[6]廉小親.模糊控制技術[M].北京:中國電力出版社,2003.
The Method Study and Simulation of Fuzzy Self-adaptive PID Control
LI Chun-guang,SUN Zhao-xia
(Department of Computer Science and Technology,Xiamen University of Technology,Xiamen 361024,China)
Conventional PID control can not reach a satisfactory result in nonlinear and time varying systems.In this study,a fuzzy inference method is adopted to realize the automatic regulation of PID parameters.The application of the controller in a certain system is also simulated in Matlab.The resultsof the simulation show that the fuzzy self-adaptive control has certain advantages over conventional ones in the aspects such as fast-response,high-stability and better-flexibility.
fuzzy self-adaptive;PID control;Matlab simulation
TP27312
A
1008-178X(2011)02-0045-04
2011-03-08
廈門市科技計劃項目 (3502Z20093037);廈門理工學院科研啟動資助項目 (YK J06003R)。
李春光 (1967-),男,遼寧營口人,廈門理工學院計算機科學與技術系副教授,碩士,從事智能控制、嵌入式測控研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(2017年9期)2017-09-26 03:41:45