矩形液艙橫蕩流體載荷的Fluent數值模擬
2011-11-09 06:35:16張書誼段文洋
中國艦船研究 2011年5期
關鍵詞:實驗
張書誼 段文洋
1 中國艦船研究設計中心,湖北 武漢 430064 2 哈爾濱工程大學船舶工程學院,黑龍江哈爾濱 150001
1 引 言
近年來,隨著液化天然氣(LNG)船需求量的增加,液艙晃蕩問題逐漸引起人們的重視。尤其是目前液體船的噸位和液艙容積越來越大,艙內液體晃蕩會產生很大的砰擊載荷,因此,如何準確預報砰擊載荷便成為研究熱點。另外,基于海洋開發的要求,浮式生產儲油設備(FPSO)需求量增加。這種船舶一般都是在惡劣的海浪環境中工作,油艙內晃蕩運動劇烈,也需要估算砰擊載荷來進行結構設計等。由于流體大幅晃蕩是非線性運動,在理論上尚沒有好的解決辦法,目前主要是通過試驗和數值模擬進行研究。Lee[1]通過數值模擬對試驗中的尺度效應以及各參數對結果的影響進行了研究。朱仁慶[2]采用VOF方法對晃蕩問題及其與結構的相互作用進行了系統研究。文獻[3-4]較系統地介紹了各種數值方法的優缺點。近年來,發展了一些無網格方法,Souto-Iglesia[5]采用 SPH 方法對晃蕩問題進行了研究。但采用大型商用軟件對晃蕩問題進行研究的較少,Modaressi-Tehrani等[6]采用Fluent對晃蕩時波浪翻卷引起的砰擊載荷進行了計算;李誼樂[7]采用CFX對晃蕩對船舶橫搖的影響進行了計算。為進一步研究大型商用軟件對晃蕩問題的模擬能力,本文采用Fluent對矩形液艙的橫蕩問題進行了數值模擬,并將數值結果與韓國大宇船舶與海洋工程公司公布的實驗結果進行了比較。
2 晃蕩問題理論分析及數值模擬方法
2.1 液艙的固有頻率分析
根據勢流理論,可知寬為b,水深為h的液艙內流體運動固有頻率的表達式為:

當m取1時得到的值即為一階固有頻率,本文中提到的晃蕩問題的固有頻率均是指該值。
2.2 數值模擬方法
Fluent軟件對流體運動方程是采用有限體積法進行離散模擬,而有限體積法是基于下面積分形式的控制方程。對于多相流,連續方程:

式(2)~式(4)中,V 為任意形狀的控制體積;S 為控制體的外表面;n→為面S的單位法向向量;ci為第i種流體的體積分數;T為應力張量;fb為體積力。
3 實驗及數值模型
本文以韓國大宇船舶與海洋工程公司2005年公布的矩形液艙橫蕩實驗數據作為驗證數值結果的依據。該數據是由第23屆ITTC耐波性委員會推薦[8],實驗的具體細節參見文獻[9]。
實驗模型為長 0.8m,高 0.5m,寬 0.35 m 的長方體液艙。本文對實驗水深分別為30%、50%、70%和80%艙深,激振頻率分別為固有頻率的0.8、0.9、1.0、1.1 和 1.2 共 20 種情況時,對壁面上的壓強值進行了測量,各壓強監測點的布置如圖1所示 (圖中單位為mm),橫蕩的位移幅值均為0.02 m。

實驗數據是每隔50 μs取一次,但振蕩很劇烈。為了更好地看清其變化趨勢,通過Fortran編程,每隔10 ms取一次數據,對數據進行處理。
數值模型均為二維模型。網格是在Fluent前處理器Gambit中生成,采用結構化四邊形網格,數目為10 000個,網格數目的選取參考了文獻[10]的結果。在求解模型中,對流項采用一階迎風差分格式,時間離散格式為一階隱式,多相流模型采用VOF模型,艙內氣體不可壓縮,湍流模式采用標準k-ε模式,壁面區采用壁面函數法中的標準壁面條件。另外,模型采用動網格,壁面運動速度由自定義函數(UDF)給定,幅值根據位移幅值和頻率確定。初始化流場時,湍動能和耗散率的設定值根據文獻[11]中的經驗公式計算。時間步長為0.001 s,迭代時間為 10 s,實驗測量的時間歷程為50 s。利用Origin軟件畫出在不同水深、不同頻率時壓強隨時間的變化曲線后,發現曲線幅值和周期基本不隨時間變化,前10 s內的曲線即可描述出壓強的變化特征。因此,本文中的所有情況均計算至10 s。以上模型是在研究了網格數目、湍流參數、艙內液體粘性系數以及艙內氣體可壓縮性對計算結果的影響后得到的。該模型既可滿足穩定性要求,又能節省計算時間。
4 數值計算結果
4.1 距自由面較深點處流體載荷的模擬結果
對于自由面以下較深處的點,由圖2和圖3可看出,當激振頻率低于固有頻率時,計算值和實驗值基本重合。在其它水深時,情況類似。在共振時,各水深情況下的幅值相對偏差也很小。而當激振頻率高于固有頻率時,計算結果的幅值和周期相對于實驗結果均偏大,水深為50%艙深時的幅值偏差最大。


4.2 自由面附近點處流體載荷的模擬結果
對于自由面附近的點,由圖4可看出,當激振頻率等于固有頻率時,幅值偏差很小。在其它水深時,情況類似。由圖5可看出,當激振頻率低于固有頻率時,幅值偏差較大。在水深為30%艙深時計算值偏大,水深為50%艙深時計算值偏小。而激振頻率高于固有頻率時,幅值偏差介于兩者之間。


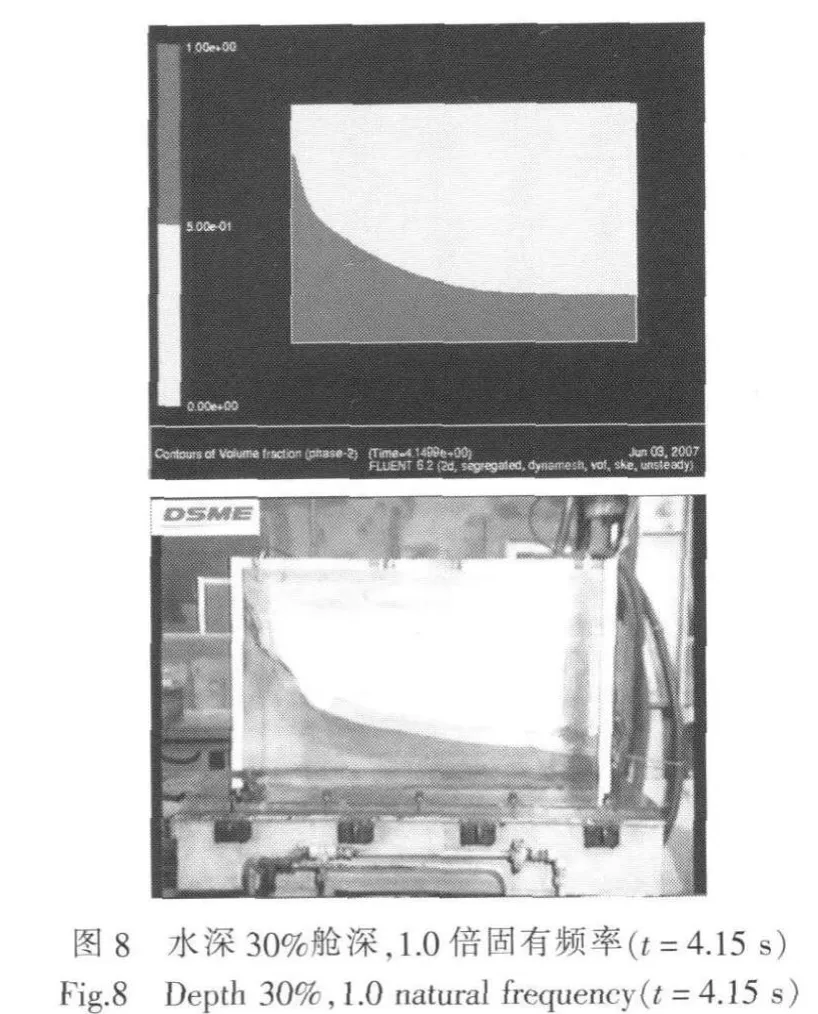
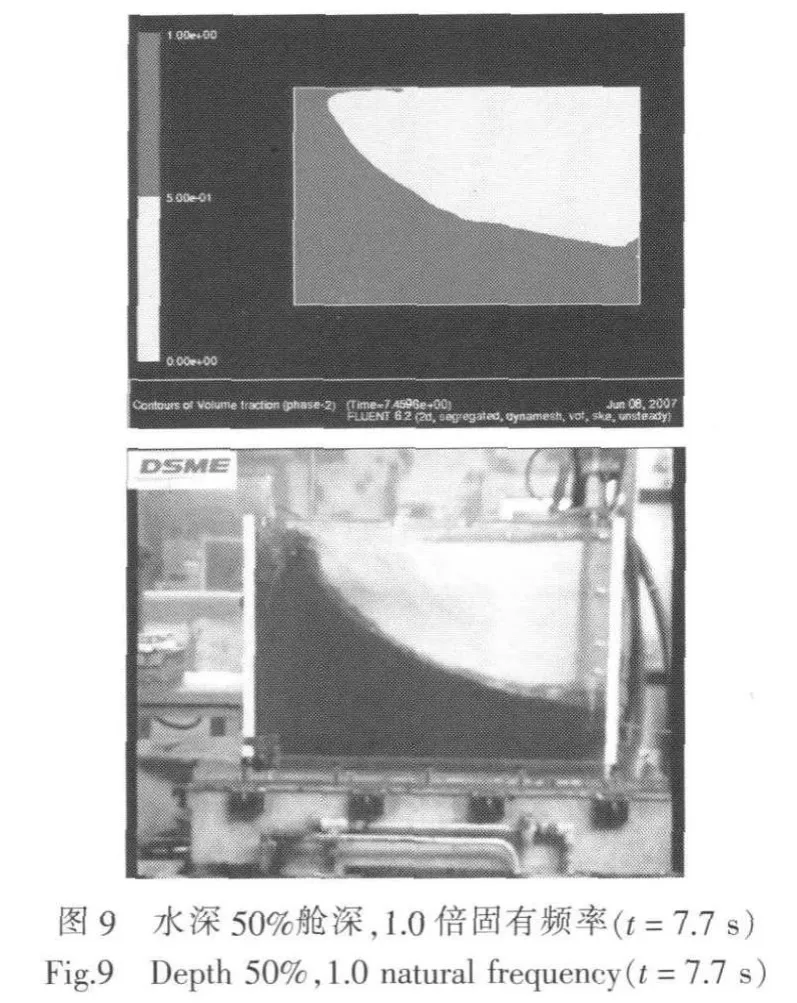
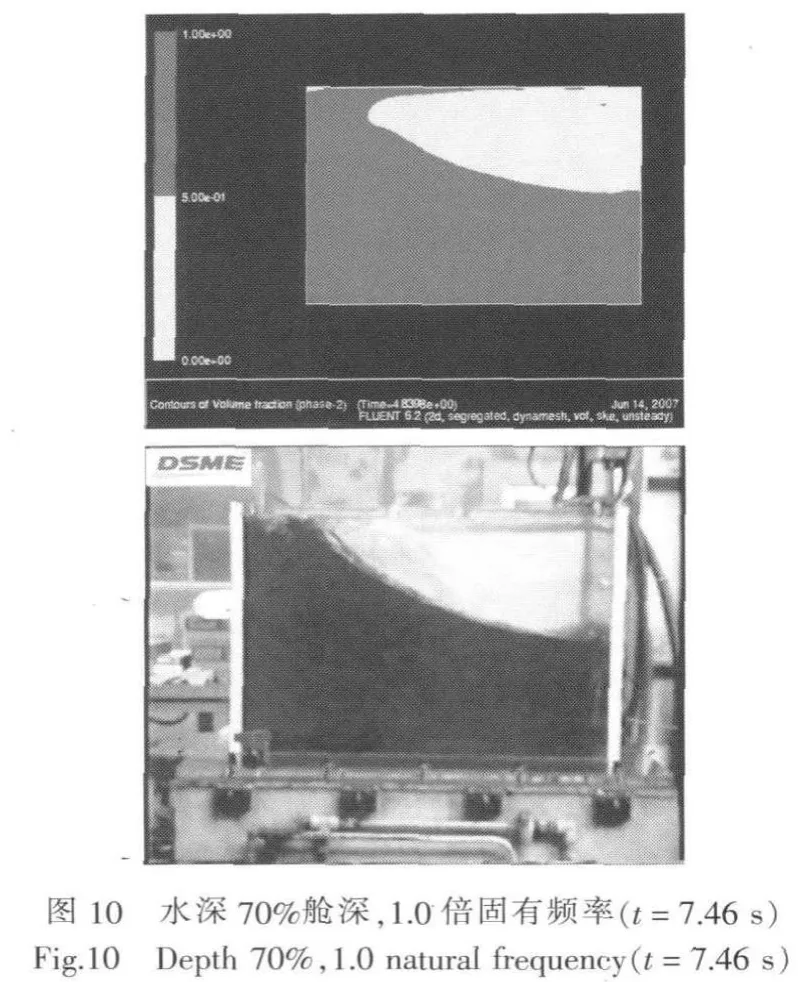
4.3 共振時砰擊載荷及自由液面形狀的模擬結果
由圖6可看出,左壁面上點處砰擊載荷的計算值與實驗值差別較大,計算值偏小,而水深為30%艙深時計算值偏大,水深為70%艙深時在個別周期內計算值會大于實驗值。由圖7可看出,艙頂上點的砰擊載荷的計算值與實驗值不在同一個數量級上,在其它水深時情況類似。
自由液面形狀的模擬結果如圖8~圖10所示,各圖中的上圖為計算結果,下圖為實驗結果。


4.4 不同水深時左壁面上自由面處點的壓強值比較
由圖11可看出,隨著水深的增加,相位依次后移。這是因為水深越大,計算得到的晃蕩頻率與實際頻率偏差便越大,周期偏大的也越多。

5 結 論
1)對于二維晃蕩問題,網格尺度為艙長的0.01倍左右就可以達到精度要求。
2)Fluent軟件對在自由面以下較深點處流體載荷的計算結果(幅值和相位)基本與實驗結果一致,而對于水面附近的點,偏差則較大。砰擊載荷的計算幅值與實驗值差別較大,尤其是對艙頂上點的砰擊載荷,其計算值與實驗值不在同一個數量級上。共振時,各點處的計算幅值與實驗結果之間的相對偏差并不比在其它兩個頻率(0.8倍和1.2倍的固有共振頻率)時大。
3)激振頻率大于固有頻率以及水深較大時,計算得到的振蕩周期與實驗值相比偏大,在水深較大時更為明顯。計算得到的幅值會逐漸衰減,在水深較小處更為明顯。
4)當水深在30%艙深附近時,即使產生共振,飛濺也不明顯。但隨著水深的增加,共振時會產生波面破碎和水花飛濺現象,這與實驗結果基本一致。
[1]LEE D H.A parametric sensitivity study on LNG tank sloshing loads by numerical simulations [J].Ocean Engineering,2007,3:3-9.
[2]朱仁慶.液艙晃蕩及其與結構的相互作用[D].無錫:中國船舶科學研究中心,2001.
[3]CARIOU A,CASELLA G.Liquid sloshing in ship tanks:a comparative study of numerical simulation [J].Marine Structure,1999,12(3):183-198.
[4]ZHU R Q,WU Y S,INCECIK A.Numerical Simulation of Liquid Sloshing-a Review [J].Shipbulding of China,2004,45(2):14-27.
[5]SOUTO-IGLESIAS A,DELORME L,PéREZ-ROJAS L,et al.Liquid moment amplitude assessment in sloshing type problems with smooth particle hydrodynamics [J].Ocean Engineering,2006,33(11/12):1462-1484.
[6]MODARESSI-TEHRANI K,RAKHEJA S,SEDAGHATI R.Analysis of the overturning moment caused by transient liquid slosh inside a partly filled moving tank [J].Journal of Automobile Engineering,2006,220(3):289-301.
[7]李誼樂.艙內晃蕩對船舶橫搖影響的數值分析[J].上海交通大學學報,2000,34(1):6-9.
[8]Report of 23th ITTC seakeeping committee [R],Edinburgh,2005.
[9]Report DSME.Summary Report of Sloshing Model Test for Rectangular Model[R],2005.
[10]Pierre C,Sames,Delphine Marcouly,Thomas E.Schellin.Sloshing in Rectangular and Cylindrical Tanks[J].Journal of Ship Research,2002,46(3):186-200.
[11]王福軍.計算流體動力學分析——CFD軟件原理及應用[M].北京:清華大學出版社,2004.
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
