帶定子電阻辨識的新型滑模速度觀測器
2011-11-20 08:34:40李國華廉兆軍王繼強
微特電機 2011年9期
關鍵詞:模型
李國華,廉兆軍,王繼強
(遼寧工程技術大學,遼寧葫蘆島125105)
0 引 言
在無速度傳感器的異步電動機調速系統中,獲得轉速信號的方法基本上有三條思路:開環計算轉速、閉環構造轉速和利用電動機結構上的特征提取轉速信號[1]。常用的轉速辨識方法主要有直接計算法、模型參考自適應法、觀測器法、轉子齒諧波法、擴展卡爾曼濾波法、高頻注入法和智能控制法等[2-5]。無速度傳感器技術的核心問題是對磁鏈和轉速的觀測[5]。在磁鏈觀測中,電壓模型不含有轉子電阻和轉子時間常數,因此可以有效降低轉子參數變化的影響。但電壓模型主要存在兩方面的問題:①純積分環節會產生直流漂移和初始值問題;②定子電阻變化對磁鏈觀測精度的影響。尤其在低速范圍內,上述問題的影響更加明顯。在轉速觀測中,目前廣泛使用的PI自適應率的參數整定比較復雜,如何選擇更合理有效的替代方法也是值得研究的問題[6]。
近年來,電機滑模控制技術發展迅速,并取得一定的進步。文獻[7-9]分別提出了異步電動機的滑模速度觀測方法,并取得了較好的效果,但均未考慮電機定、轉子電阻變化對磁鏈和轉速觀測精度的影響。本文提出了一種帶定子電阻辨識的新型滑模速度觀測器。采用一種改進的電壓轉子磁鏈模型,在降低轉子電阻變化影響的同時,有效解決了純積分電壓模型中的直流漂移和初始值問題;并通過定子電阻的在線辨識來降低定子電阻變化的影響;與廣泛使用的PI自適應率相比,滑模觀測器在轉速觀測中需要設定的參數只有一個,從而降低了參數整定的復雜性。
1 異步電動機的狀態方程
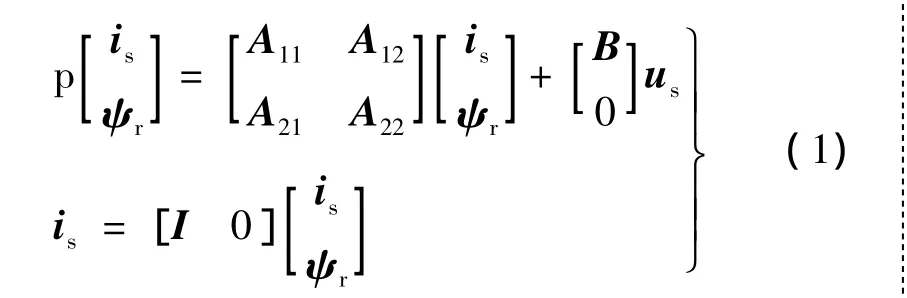
在兩相靜止αβ坐標系下,以定子電流和轉子磁鏈為狀態量的異步電動機狀態方程如下:
2 帶定子電阻辨識的新型滑模速度觀測器
圖1為帶定子電阻辨識的新型滑模速度觀測器的原理框圖,主要分為定子電流計算、定子電阻辨識、改進電壓轉子磁鏈模型和滑模速度辨識四部分,該觀測器輸入量是定子電壓和定子電流的實際值,輸出量是電機轉速的觀測值。
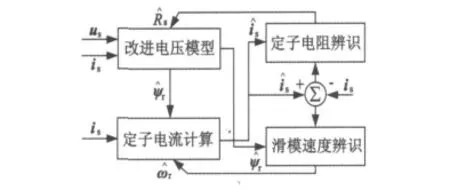
圖1 新型滑模速度觀測器框圖
2.1 定子電流計算和定子電阻辨識
在異步電動機狀態方程的基礎上,選擇定子電流為系統的反饋信號,并定義定子電流估計值與實際值之差作為誤差信號,G為反饋矩陣,可得以定子電流為狀態量的自適應偽降階觀測器:

在轉子磁鏈的觀測值等于實際值的前提下,通過式(1)、式(2)可得觀測器狀態誤差方程:
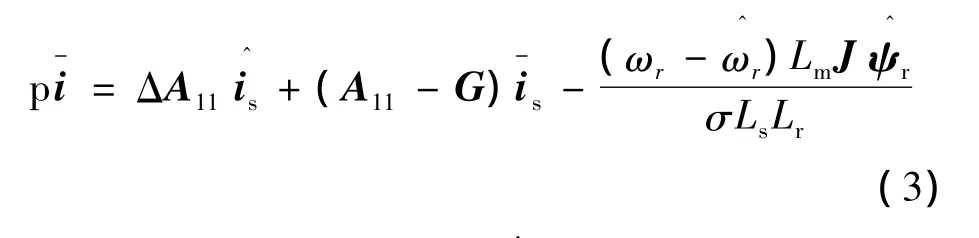
式中:ΔA11=A11是定子電阻辨識值,定子電流誤差
根據李雅普諾夫穩定性理論,在轉速穩定時,將定子電阻視為變化的參數,可得定子電阻PI自適應估算公式[10]:

式中:KP和KI為待定常數。
在電機的實際運行中,由于繞組溫度變化和集膚效應的影響,會使定子電阻發生變化,直接影響磁鏈和轉速的觀測精度。準確的定子電阻辨識為實現磁鏈和轉速的精確觀測奠定了基礎。
2.2 改進電壓模型
傳統觀測器法中轉子磁鏈的觀測多采用電流模型,易受轉子參數變化的影響。由于本文的定子電阻辨識是在假設轉子磁鏈的觀測值等于實際值的前提下進行的,因此在保證磁鏈觀測準確的情況下,采用哪種磁鏈模型對系統的正常工作沒有影響。為降低轉子參數變化對系統的影響,本文選擇了電壓模型進行轉子磁鏈觀測。傳統電壓模型中的純積分環節會產生直流漂移和初始值問題,而初始值問題的最終影響同樣是產生直流偏置誤差。在電機的實際運行中,電壓模型輸入的反電動勢中直流成分的存在是無法避免的,經過積分項的累積,最終會產生很大的直流漂移[11]。
文獻[12]采用一種新穎的電壓磁鏈模型觀測定子磁鏈,取得了較好的觀測精度。本文將該方法應用于轉子磁鏈的觀測中,并給出改進的電壓轉子磁鏈模型(簡稱改進電壓模型)的原理圖、仿真模型圖和驗證結果。圖2a為改進電壓模型的原理圖,圖中ωe為電機同步角頻率。假設模型輸入的反電動勢為:
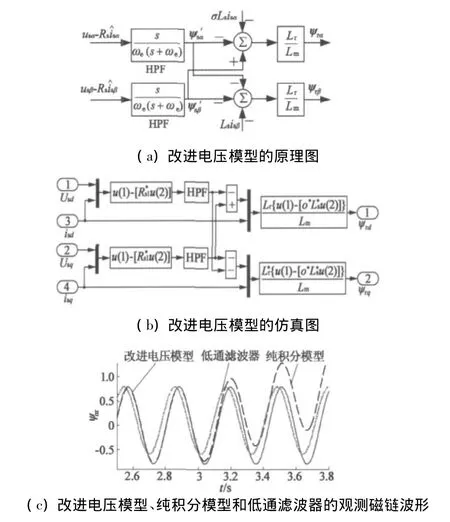
圖2 轉子磁鏈觀測器及其觀測磁鏈的波形
同理可得:
可見,改進電壓模型的幅頻特性和相頻特性與純積分電壓模型一致,但改進電壓模型的直流增益為零,而純積分電壓模型的直流增益為無窮大。因此改進電壓模型可以有效抑制直流漂移和初始值問題,而且不會引入幅值和相位上的誤差。圖2b是改進電壓模型在Matlab/Simulink環境下的仿真模型。圖2c是在反電動勢中突然加入1 V直流分量的情況下,改進電壓模型、低通濾波器和純積分電壓模型分別觀測的轉子磁鏈波形。由波形圖可見,純積分模型的觀測磁鏈波形中有明顯的直流漂移;低通濾波器雖然抑制直流偏置引起的發散現象,但其觀測磁鏈波形中含有明顯的直流成分,而且在幅值和相位上都存在一定誤差;而改進電壓模型可以解決純積分模型和低通濾波器中存在的問題,實現轉子磁鏈的準確觀測。
2.3 滑模速度辨識
滑模控制技術具有響應速度快、對系統參數變化及擾動不靈敏、無需在線辨識、工程實現簡單等優點。滑模控制中的非線性和高速切換特性,非常適合異步電動機這種復雜對象的控制。
為了保證系統的全局漸進穩定性,本文根據滑模控制理論設計了滑模速度辨識方法。即:
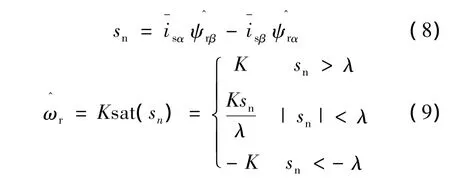
式中:K和λ為大于零的待定常數。
利用定子電流估計值與實際值之差,通過選取合適的切換函數和滑模控制律使系統的狀態最終穩定在設計好的滑模超平面上,從而實現電機轉速的準確觀測。
文獻[7-9]證明了當K足夠大時,觀測器所確定的滑動模態存在且可達,滑模觀測器的等效速度會收斂于真實轉速,且定子電流和轉子磁鏈具有穩定性。但是K值越大,觀測轉速的抖動會越大,甚至出現不收斂的情況。因此,式(9)采用光滑連續的飽和函數代替常用的符號函數,以抑制觀測轉速中的高頻抖動現象。
3 仿真結果及分析
為驗證本文提出的帶定子電阻辨識的新型滑模速度觀測器(簡稱新方法)的性能,在Matlab/Simulink仿真環境下建立異步電動機無速度傳感器的矢量控制系統,在仿真過程中分別改變電機的轉子電阻值和定子電阻值,對該方案進行驗證。并在相同條件下,與無定子電阻辨識的滑模觀測器進行對比分析。
系統的參數:Rs=0.935 Ω,Rr=0.731 Ω,Ls=0.083 H,Lr=0.083 H,Lm=0.079 H;負載TL=1.8 N·m;轉子磁鏈給定值為0.8 Wb;滑模速度辨識中的待定參數λ=0.003,K=185;定子電阻辨識中,KP=0.005,KI=50;仿真時間為0~8 s;在2 s時,將轉子電阻升高至原值的1.5倍;在4 s時,將定子電阻升至原值的1.2倍。
由圖3可見,在電機給定轉速為10 rad/s的情況下,新方法可以準確地辨識定子電阻,并實時更新觀測器中的定子電阻值,以降低在電機實際運行中定子電阻變化所帶來的影響;由于新方法采用了改進電壓模型觀測轉子磁鏈,因此轉子電阻在2 s時的變化對轉子磁鏈觀測沒有影響,轉速觀測波形雖然有所波動,但很快恢復至給定值;4 s時定子電阻值發生變化,在無定子電阻辨識的滑模觀測器中,轉子磁鏈和轉速的觀測波形都出現較大誤差,明顯偏離了給定值;而在新方法中,由于定子電阻的準確辨識,觀測磁鏈和觀測轉速沒有受到定子電阻變化的影響。
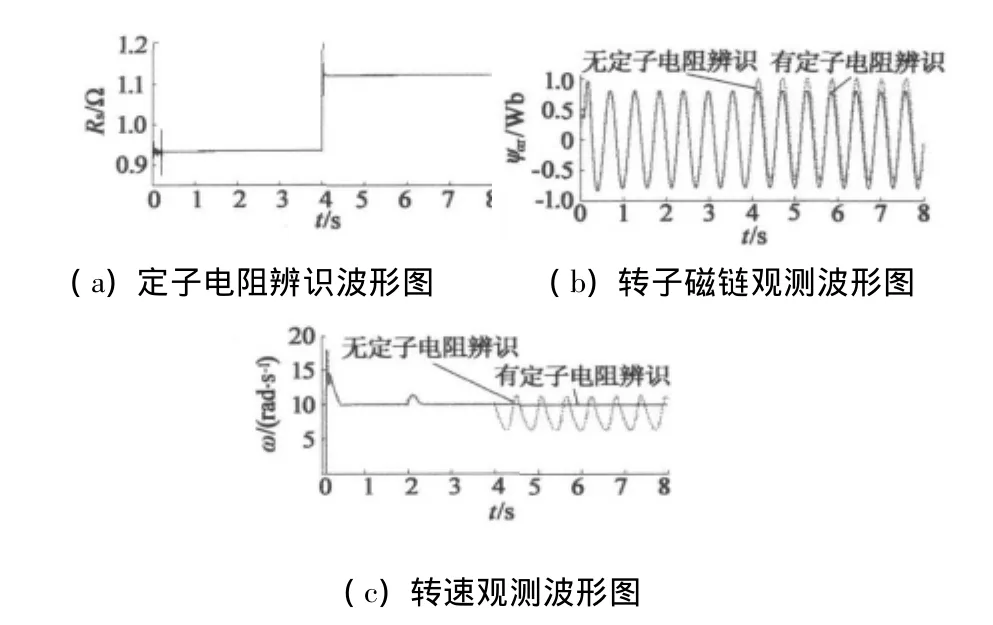
圖3 給定速度為10 rad/s時的波形圖
由圖4可見,在電機給定轉速為100 rad/s時,新方法同樣可以較準確地辨識定子電阻。在整個仿真過程中,觀測磁鏈和觀測轉速的波形穩定,能夠準確地跟蹤給定值,響應速度快,而且觀測轉速波形中不存在高頻抖動問題;而在無定子電阻辨識的滑模觀測器中,觀測磁鏈和觀測轉速都受到了定子電阻變化的影響,出現一定程度的誤差,但與低速范圍內的工作情況相比,誤差相對較小。
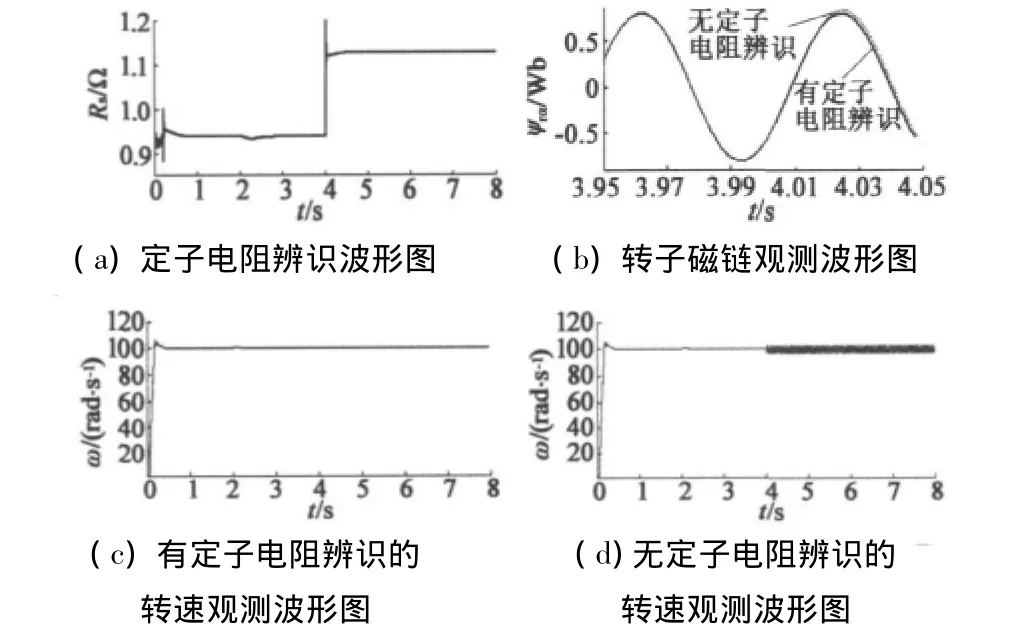
圖4 給定轉速為100 rad/s的波形圖
4 結 語
本文利用滑模變結構控制理論提出了一種帶定子電阻辨識的新型滑模速度觀測器。在準確辨識定子電阻和轉子磁鏈的基礎上,實現了異步電動機電機轉速的精確觀測。與傳統方法相比,該觀測器在全速范圍內具能夠更加準確地觀測電機的轉速和轉子磁鏈,對定、轉子電阻變化具有較強的魯棒性。
[1] 陳伯時,楊耕.無速度傳感器高性能交流調速控制的三條思路及其發展建議[J].電氣傳動,2006,36(1):3-8.
[2] OHYAMA K,ASHER G M,SUMNER M.Comparative analysis of experimental performance and stability of sensorless induction motor drives[J].IEEE Trans.Industrial Electronics,2006,53(1):178-186.
[3] GAO Q,ASHER G,SUMNER M.Sensorless position and speed control of induction motors using high-frequency injection and without offline pre-commissioning[J].IEEE Trans.Industrial Electronics,2007,54(5):2474-2481.
[4] 趙爭鳴,袁立強.電力電子與電機系統集成分析基礎[M].北京:機械工業出版社,2009:176-181.
[5] 王文森,李永東,王光輝,等.基于PI自適應法的無速度傳感器異步電動機矢量控制系統[J].電工技術學報,2002,17(1):1-6.
[6] 李華德,李擎,白晶.電機拖動自動控制系統[M].北京:機械工業出版社,2009:226-229.
[7] 張細政,王耀南,楊民生.新型感應電機自適應觀測與滑模控制策略[J].煤炭學報,2009,34(8):1144-1138.
[8] 王慶龍,張崇巍,張興.交流電機無速度傳感器矢量控制系統變結構模型參考自適應轉速辨識[J].中國電機工程學報,2007,27(15):70-74.
[9] 路強,沈傳文,季曉隆,等.一種用于感應電機控制的新型滑模速度觀測器研究[J].中國電機工程學報,2006,26(18):164-168.
[10] 王成元,夏加寬,孫宜標.現代電機控制技術[M].北京:機械工業出版社,2008:186-192.
[11] 李永東,李明才.感應電機高性能無速度傳感器控制系統-回顧、現狀與展望[J].電氣傳動,2004,34(1):4-10.
[12] 王宇,鄧智泉.一種新穎的電機磁鏈辨識算法[J].中國電機工程學報,2007,27(6):39-43.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
