多機器人數據庫管理系統的設計
2011-12-27 08:16:40趙錦芝梁天喜
中原工學院學報 2011年5期
趙錦芝,梁天喜
(中原工學院,鄭州450007)
多機器人數據庫管理系統的設計
趙錦芝,梁天喜
(中原工學院,鄭州450007)
研究了多機器人協作系統的體系結構,采用Visual C++6.0開發了多機器人數據庫管理系統,介紹了該系統的功能及其實現過程.該系統能大幅度提高編程效率和安全性,有一定的實用價值.
多機器人;數據庫;VisualC++6.0
隨著工業機器人技術的發展,機器人應用的領域和范圍不斷擴展.由于單個機器人不能完成某些復雜的任務.這就需要考慮構建多個機器人的系統,通過多機器人之間的協調與協作來完成任務[1].
經過幾十年的發展,多機器人系統的理論研究和實際應用取得了重大進展.目前,國外關于多機器人系統的研究較多,國內在這方面的研究還處于初級階段.多機器人系統的應用領域正向工業、農業、國防等邁進.
隨著機器人數量的增加,系統的復雜度會增大,一些不確定的的因素會增加,系統的安全性和穩定性面臨挑戰.另外,如何有效地分解和分配任務給機器人,如何有效地識別機器人之間的工作空間,這是迫切需要解決的問題.本文設計了一種智能化的多機器人數據庫管理系統,該系統能較好地解決機器人數據的接收、回放、存儲問題,減小了多機器人系統資源的占用率,降低了系統的不確定性.
1 多機器人協作系統總體設計
在單機器人反應式控制結構的基礎上,將多機器人協作行為建立在一種反應模式上,設計了一種面向多機器人協作系統的控制體系結構.該控制體系結構分為3層,分別是任務規劃層、協調規劃層及行為控制層[2],如圖1所示.
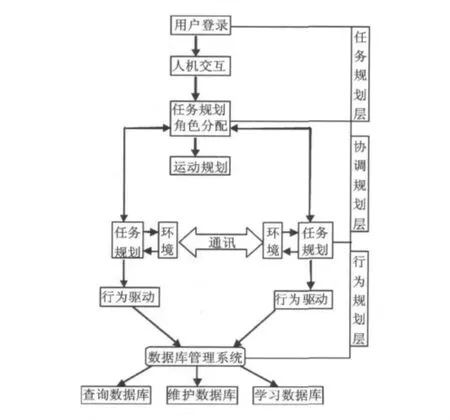
圖1 多機器人協作系統結構
(1)任務規劃層.任務規劃層賦予機器人團隊協作能力和組織能力.
(2)協調規劃層.協作規劃層確定機器人各種任務與關系后,機器人會根據自身能力、當前任務、當前環境等信息,采用行為反應控制的方法,規劃出具體的運動軌跡和運動方向.
(3)行為控制層.行為控制層可執行協調規劃層產生的運動控制命令,實現具體的控制,加強系統的實時性和動態性.
行為控制層中的數據庫管理系統,具有對機器人參數信息進行管理和維護的功能.本文設計的數據庫管理系統,能實現多機器人信息管理的系統化、規范化.
2 數據庫管理系統各功能模塊的設計
多機器人數據庫管理系統主要由系統登錄模塊、基本信息查詢模塊、數據庫維護模塊構成,如圖2所示.
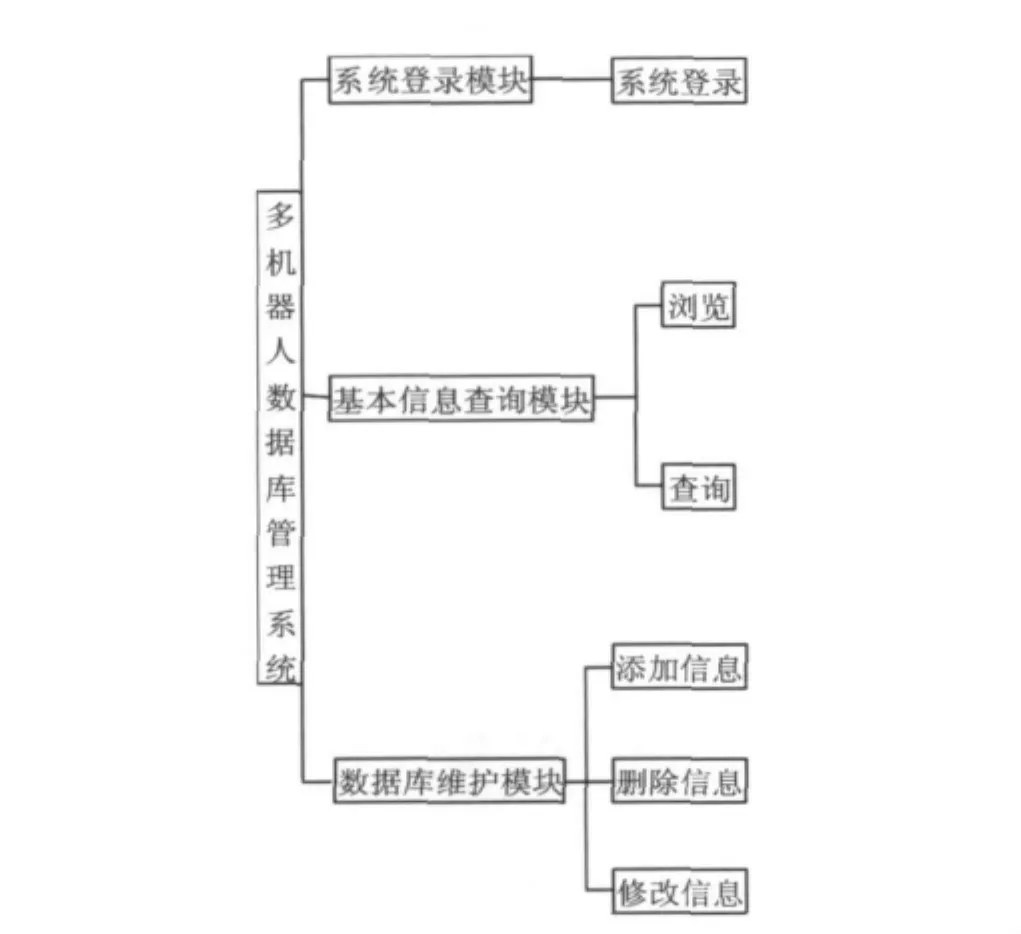
圖2 數據庫管理系統結構
2.1 系統登錄模塊
系統啟動后,彈出系統登錄界面,系統消息框提示輸入合法的用戶名和密碼,對用戶名和密碼進行驗證.如果輸入的用戶名或者密碼錯誤,系統消息框提示“您輸入的用戶名或密碼錯誤,請重試!”;如果輸入的用戶名和密碼均正確,系統將進入到下一個界面.
2.2 基本信息查詢模塊
該模塊可以瀏覽系統存儲的機器人信息,也可以選擇某些已知條件查詢,將查詢結果返回用戶端并顯示出來.
2.3 數據庫維護模塊
該模塊可以對機器人信息進行管理和維護,主要是對數據庫中的信息進行添加、刪除、修改.
2.3.1 信息的錄入
機器人信息的錄入是通過添加操作,將輸入端和對應的參數信息錄入到相應的數據庫里.該模塊通過相應的數據庫接口實現了數據的處理、傳輸、存儲功能.
2.3.2 信息的修改
隨著多機器人工業技術的迅猛發展以及機器人的外部環境參數的改變,原有的參數值會被新的參數值取代.因此在用戶端輸入或選擇已知條件、輸入新的參數時,可以通過數據修改操作,將數據庫里原有的記錄進行修改.
3 數據庫管理系統的實現
采用VisualC++6.0編程工具開發多機器人數據庫管理系統,系統使用的后臺數據庫服務器為Access 2003.
由于機器人信息參數表的數據模型與關系模型最為匹配,因此本系統選用關系模型來存儲數據.
VisualC++6.0高級語言為應用程序訪問數據庫提供了三種常用的方法:ODBC(開放數據庫連接)、DAO(數據訪問對象)和 ADO(活動數據訪問對象)[3].本系統采用ODBC數據源的連接方式.由于直接使用ODBC API編寫應用程序要繪制大量代碼,因而在數據庫讀取數據之前,必須做一些復雜的初始化操作.而MFC ODBC類封裝了ODBC API,提供了簡化的調用接口.它主要包括三個類:CDatabase類、CRecordSet類、CRecord View類.本系統提供了一種簡單的C++與ODBC的接口連接方法,在快速生成簡單、一致的接口應用程序方面,這些類非常有用.使用MFC ODBC方式,簡單靈活,易于開發[2].鑒于此,本文采用MFC ODBC數據庫技術開發多機器人數據庫管理系統.
3.1 系統登錄的實現
首先建立ODBC數據源,完成對數據源Robotdbs的添加;然后利用類向導Classwizard創建CEnter Data-Set類,編寫登錄對話框程序代碼.多機器人數據庫管理系統運行后首先進入系統登錄界面,如圖3所示.
在登錄對話框界面輸入有效的用戶名和密碼.若輸入的用戶名和密碼均正確,即通過了身份驗證,系統會彈出友好消息框“歡迎進入多機器人數據庫管理系
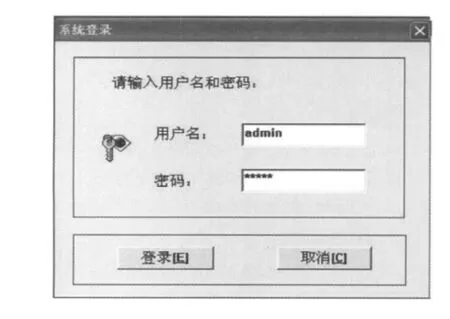
圖3 系統登錄界面
統!”,系統轉入相應的界面.登錄后,轉入系統主界面.如圖4所示.
圖4 系統主界面
3.2 基本信息查詢的實現
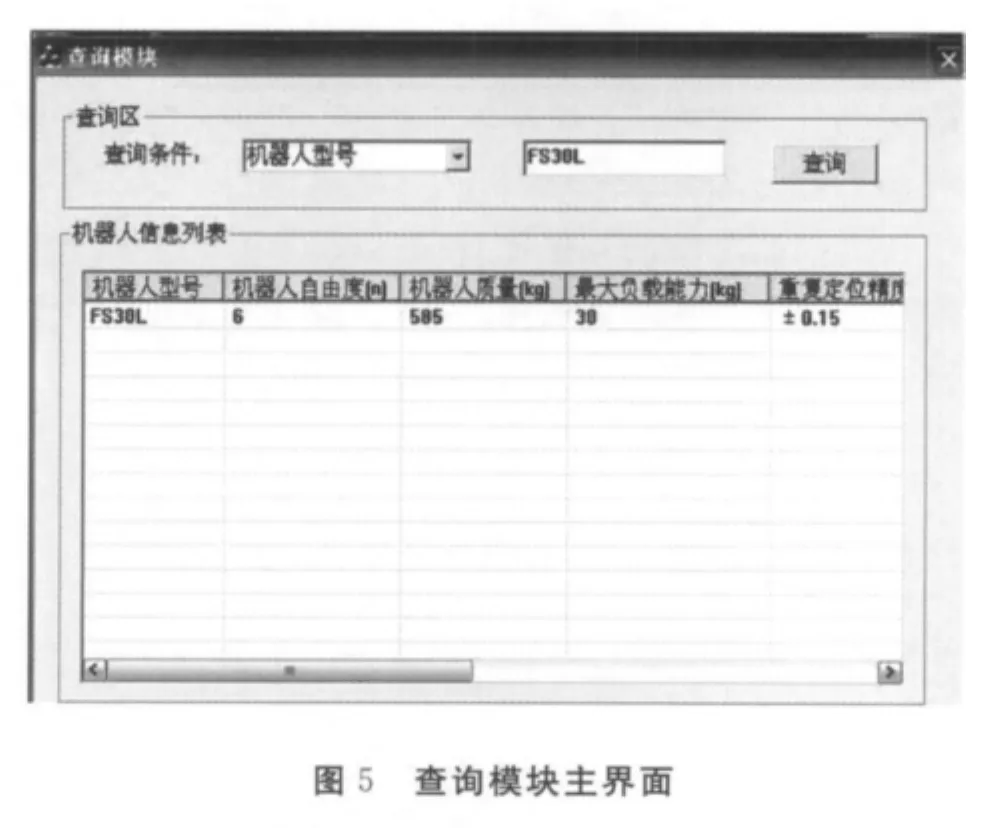
在多機器人數據庫管理系統查詢模塊查詢區執行查詢操作,先在下拉框選擇查詢條件(以選擇機器人型號為例,在查詢編輯框中輸入川崎機器人系列型號FS30L),點擊查詢按鈕,查詢模塊主界面出現記錄查詢信息.如圖5所示.
3.3 數據庫維護的實現
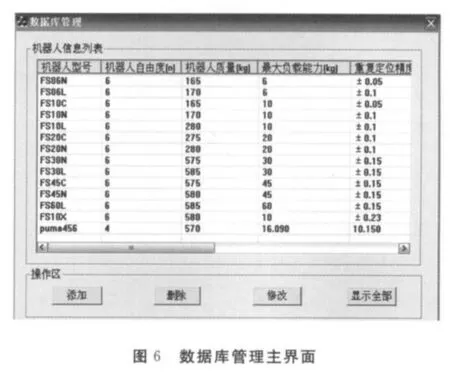
在菜單欄“數據庫維護”項選擇“數據庫管理”,進入數據庫管理主界面.該模塊主要實現機器人信息的添加、修改、刪除功能.如圖6所示.
在多機器人數據庫管理系統主界面操作區執行添加操作,記錄對話框窗口彈出,在該窗口根據條件輸入相應的新的記錄;點擊確定按鈕后,如果添加成功,則彈出友好消息框“添加機器人信息成功!”.系統會自動保存該記錄.如圖7所示.

在多機器人數據庫管理系統主界面操作區執行修改操作,先選中要修改的記錄,記錄對話框窗口彈出,在該窗口根據條件輸入要修改的記錄;點擊確定按鈕后,如果修改成功,則彈出友好消息框“修改機器人信息成功!”.系統會自動刷新記錄.如圖8所示.
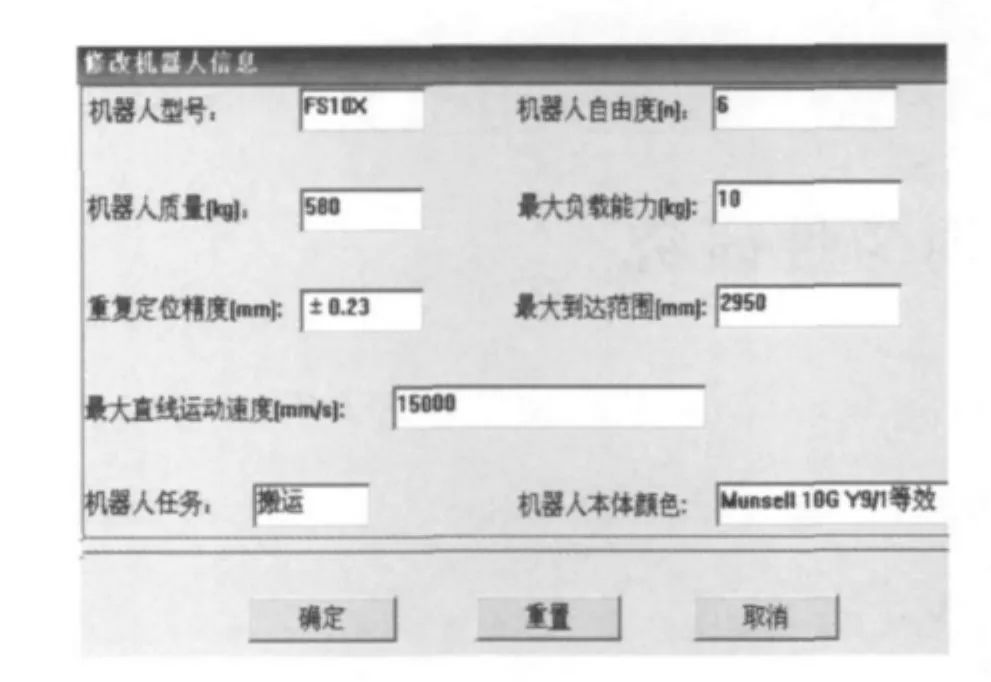
圖8 修改機器人信息界面
此外,在多機器人數據庫管理系統主界面操作區執行刪除操作,先選中要刪除的記錄,點擊確定按鈕后,系統彈出友好消息框“是否要刪除該條機器人信息記錄!”.刪除成功后,系統會自動刷新記錄.
4 結 語
本文提出了一種多機器人協作體系結構,介紹了多機器人數據庫管理系統各模塊的功能及其實現過程,闡述了ODBC連接數據源接口與后臺數據庫Access2003之間的傳輸、接收方式,說明了系統的主要實現過程.該數據庫管理系統能有效地支撐多機器人協調與協作.
[1]高志軍,嚴國正,丁國濤,等.多機器人協調與合作系統的研究發展與現狀[J].光學精密工程,2001,9(2):99-103.
[2]趙志偉.多機器人協調作業策略研究[D].哈爾濱:哈爾濱工業大學,2006:3-8.
[3]姚明明.基于PSO神經網絡鉆削數據庫系統的研究與開發[D].哈爾濱:哈爾濱理工大學,2008:36-38.
[4]林青松,胡方霞,劉杰,等.VisualC++案例開發[M].北京:中國水利水電出版社,2005:78-88.
[5]侯俊杰.深入淺出MFC第二版[M].武漢:華中科技大學出版社,2001.
[6]楊小平.VC++項目實踐攻關[M].北京:科學出版社,2002.
Design of Multi-robots Database Management System
ZHAO Jin-zhi,LIANG Tian-xi
(Zhongyuan University of Technology,Zhengzhou 450007,China)
The architecture of cooperative system of multi-robots(MRS)has been studied in this article.The database management system of multi-robots are developed by Visual C++6.0.The function of system and implementation process has been introduced.The multi-robots system can greatly improve the programming efficiency and system security.To some extent,the multi-robots system has some practical values.
multi-robot;Database;VisualC++6.0
TP242.6
A
10.3969/j.issn.1671-6906.2011.05.003
1671-6906(2011)05-0012-04
2011-09-26
國家“863”項目(2005AA404290);河南省科技攻關重點項目(082102210084)
趙錦芝(1969-),女,黑龍江哈爾濱人,副教授.
猜你喜歡
當代陜西(2020年13期)2020-08-24 08:22:02
制造技術與機床(2017年5期)2018-01-19 02:49:17
中華手工(2017年2期)2017-06-06 23:00:31
財經(2017年2期)2017-03-10 14:35:35
濰坊學院學報(2016年2期)2016-12-01 13:00:11
財經(2016年15期)2016-06-03 07:38:02
財經(2016年3期)2016-03-07 07:44:46
財經(2016年6期)2016-02-24 07:41:51
新聞傳播(2015年11期)2015-07-18 11:15:04
中外會展(2014年4期)2014-11-27 07:46:46
