姿控發(fā)動機布局方式研究*
2012-01-01 05:51:02石凱宇程英容張奕群
現(xiàn)代防御技術 2012年2期
石凱宇,程英容,張奕群
(北京電子工程總體研究所,北京 100854)
0 引言
大氣層外飛行器的姿態(tài)控制是飛行控制系統(tǒng)的重要組成部分。在大氣層外,由于缺乏空氣動力,飛行器的姿態(tài)控制一般通過安裝在其尾部的姿控發(fā)動機的開關動作來實現(xiàn)[1]。在姿控發(fā)動機的布局設計中,需要關心的問題包括姿控發(fā)動機的數(shù)目、姿控發(fā)動機的安裝位置以及安裝角度。由于布局方式對姿態(tài)控制的控制效果和控制成本有著直接的影響,對其研究具有很大的工程應用價值。
1 國內(nèi)外姿控發(fā)動機布局方案研究
姿控發(fā)動機的布局設計包括姿控發(fā)動機數(shù)目的選取、姿控發(fā)動機的安裝位置以及安裝角度的設計。姿控發(fā)動機的數(shù)目一般有四、六、八等,安裝位置有集中布局和分散布局2種,安裝角度有“橫平豎直”安裝和“傾斜”安裝2種。本節(jié)以姿控發(fā)動機數(shù)目的演變?yōu)橹骶€,介紹目前國內(nèi)外幾種有代表性的姿控發(fā)動機布局方式。
四姿控發(fā)動機布局是實現(xiàn)飛行器三通道可控的最小發(fā)動機布局形式[2],采用該布局形式的飛行器中最典型的是火箭達因公司研制的供演示和驗證用的大氣層外飛行器[3],圖1為該飛行器姿控發(fā)動機布局后視圖,它采用了四姿控發(fā)動機傾斜布局形式。

圖1 四姿控發(fā)動機分散傾斜布局Fig.1 Separated and tilted layout of four-ACTs
由于四姿控發(fā)動機布局形式的飛行器在抗干擾能力和平穩(wěn)性等方面都有不足,因此,現(xiàn)在已經(jīng)停止研制和使用。
六姿控發(fā)動機布局方案也是大氣層外飛行器經(jīng)常采用的方案。由美國雷聲公司研制的一種大氣層外飛行器[4],采用六姿控發(fā)動機分散布局形式。圖2是文獻[4]所采用的姿控發(fā)動機布局示意圖。其中 1#,3#,4#,6#發(fā)動機控制滾轉(zhuǎn)和偏航,而 2#,5#號發(fā)動機控制俯仰。其姿控發(fā)動機采用了2種推力水平,俯仰通道的推力為滾轉(zhuǎn)和偏航通道的2倍,以確保俯仰通道有足夠的控制能力。
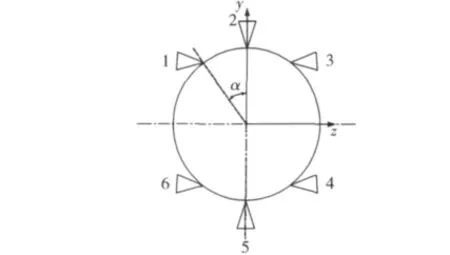
圖2 六姿控發(fā)動機橫平豎直分散布局Fig.2 Separated horizontal and vertical layout of six-ACTs
六姿控發(fā)動機分散布局形式有利于減小滾轉(zhuǎn)方向的控制力矩,提高滾轉(zhuǎn)通道的控制平穩(wěn)性,但同時給發(fā)動機燃料輸送管道的設計帶來了一定的困難。為了降低制造難度,“T”型布局應運而生[5],如圖3所示。該布局實現(xiàn)了橫平豎直集中布局方式。相對于“分散布局”,該布局形式將3個發(fā)動機集成為一組,便于制造和安裝,而缺點是滾轉(zhuǎn)通道的控制力矩較大,平穩(wěn)性較差。
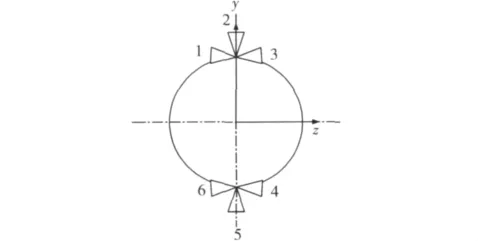
圖3 六姿控發(fā)動機布局“T”型布局Fig.3 “T”style layout of six-ACTs
八姿控發(fā)動機布局形式也是目前常用的一種方案[6]。一種輕型外太空飛行器[7]所采用的典型八姿控發(fā)動機布局如圖4所示。該布局實際上是在六姿控發(fā)動機“T”型布局的基礎上增加了7#,8#發(fā)動機。如果用1#,3#,4#,6#發(fā)動機專門控制滾轉(zhuǎn),而7#,8#發(fā)動機控制偏航,2#,5#發(fā)動機控制俯仰,則可實現(xiàn)三通道的獨立控制,從而簡化姿控發(fā)動機的開關邏輯的設計。但是,這種簡化以增加發(fā)動機的數(shù)目為代價。
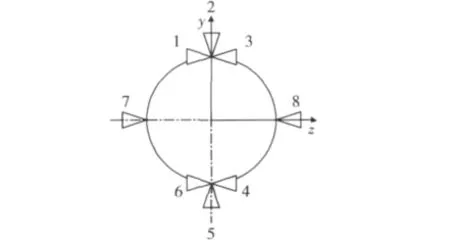
圖4 八姿控發(fā)動機橫平豎直分散布局Fig.4 Separated horizontal and vertical layout of eight-ACTs
以上介紹了國內(nèi)外幾種典型的發(fā)動機布局方案。當然,還存在其他多種姿控發(fā)動機布局方案。在姿控發(fā)動機布局設計中,應該考慮哪些因素?如何評價布局的優(yōu)劣?本文在工程實踐的基礎上,提出了3個對立因素,下一節(jié)將進行詳細闡述。
2 姿控發(fā)動機布局方案研究
姿控發(fā)動機的布局設計,本質(zhì)上就是對飛行器三通道的控制力矩進行設計。設計控制力矩要考慮的因素很多,其中包括飛行器大角度機動時的快速反應能力、穩(wěn)態(tài)控制精度和平穩(wěn)性、對軌控發(fā)動機干擾的抑制能力、對故障的容錯能力等,而這些因素往往是彼此對立的。
本節(jié)首先分析了穩(wěn)態(tài)控制精度、平穩(wěn)性、機動性以及抗干擾能力之間的定量關系,在此基礎上,討論布局需要考慮的3個對立因素,并提出解決這些矛盾的方法和設計應該遵循的原則。
2.1 控制指標的定量分析
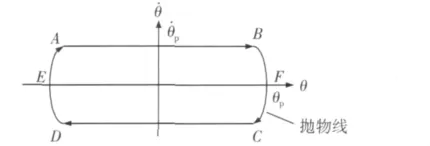
圖5 無干擾力矩的極限環(huán)Fig.5 Limit cycle without disturbance torques

隨后,飛行器開始反向運動,到達C點時發(fā)動機關機,角速度變?yōu)椋w行器開始以-的角速度開始慣性飛行,直到D點發(fā)動機再次開機,相軌跡沿著D→A運動到A點,完成一個循環(huán)。觀察半個循環(huán)E→A→B→F階段,有

式中:tf為A→B段飛行器慣性飛行的時間。
簡化后,有

關于公式(2),有如下說明:
2.2 布局需要考慮的3個對立因素
(1)快速性與控制精度之間的矛盾
在飛行器進行大角度機動時,要求其有足夠的快速反應能力以盡快消除姿態(tài)偏差。因此,姿控發(fā)動機必須給飛行器提供足夠大的控制力矩以產(chǎn)生大的姿態(tài)角加速度a。但是在飛行器平穩(wěn)飛行階段,姿態(tài)控制的目的是保持姿態(tài)穩(wěn)定,此時對飛行器的控制精度成為主要考慮的一個因素,希望θp越小越好。
由公式(2)可知,a與θp成正相關關系。一個極端的情況是tf=0時,此時發(fā)動機總是處于頻繁開機狀態(tài),a與θp成正比。在其他條件相同的情況下,增大a會導致θp相應增大,即提高機動性是以犧牲控制精度為代價的。這是一對必須考慮的矛盾,解決這一矛盾的一個思路是變推力或者改變發(fā)動機最短開機時間。其實就沖量而言,變推力與變最短開機時間是等效的。當需要大角度機動時,采用較大的發(fā)動機推力來產(chǎn)生較大的角加速度a;需要保證穩(wěn)態(tài)控制精度時,采用較小的發(fā)動機推力來降低 θp。
(2)控制平穩(wěn)性與抗干擾能力之間的矛盾
平穩(wěn)性是飛行器穩(wěn)態(tài)飛行需要考慮的一個重要因素。平穩(wěn)性好,一方面可提高導引頭對目標的識別效果,另一方面可避免姿控發(fā)動機頻繁開機而造成燃料的過度消耗。這就要求盡量小。由公式(1)可知,與a成正比,因此a要盡量小,即控制力矩盡量小;在飛行器進行軌道修正時,軌控發(fā)動機開機。由于軌控發(fā)動機的推力偏心以及飛行器的質(zhì)心漂移,軌控發(fā)動機開機時會產(chǎn)生干擾力矩,對飛行器的姿態(tài)造成較大的擾動。此時姿控發(fā)動機必須產(chǎn)生足夠大的控制力矩抵消干擾力矩的影響[9]。工程實踐表明控制力矩至少是干擾力矩的1.5倍。
飛行器平穩(wěn)飛行要求控制力矩盡量小,而抗干擾則要求控制力矩盡量大,這又是一對矛盾。解決這一矛盾的一個思路同樣是變推力。
(3)布局成本與控制效果的矛盾
姿控發(fā)動機的數(shù)目選擇也是一個非常關鍵的問題。理論上,發(fā)動機的數(shù)目越多,可提供的控制選擇就越多,就越可能通過布局的合理規(guī)劃,為控制提供更好的結構條件,控制效果也就越好。但是,隨著發(fā)動機數(shù)目的增多,飛行器的質(zhì)量也隨之增大,同時飛行器制造難度也隨之提高,布局的成本隨之增大。而工程上,在滿足系統(tǒng)要求的前提下,優(yōu)先考慮的是簡單可靠、成本低,而非片面地追求高性能。這就要求盡量減少發(fā)動機的數(shù)目,這樣可以簡化飛行器的設計,降低成本。因此布局的低成本和控制效果的改善之間存在一定的矛盾。解決這一矛盾的思路是變推力,如果推力可以任意連續(xù)變化,便可以用較少發(fā)動機獲得很滿意的控制效果。
2.3 矛盾的解決思路——利用耦合
以上三對矛盾的根源在于需要在不同情況下采用不同的控制力矩。變推力或者變發(fā)動機開機時間雖然是解決這些矛盾的思路,然而變推力技術尚不成熟,發(fā)動機的最短開機時間也不能無限縮短,因此無法解決這些矛盾。在目前的技術條件下,合理利用耦合是解決這些矛盾的一個可行途徑。
在以往的設計中,一般考慮盡量避免一個姿控發(fā)動機同時控制多個姿控通道,即通道間是獨立的、解耦的[10]。這樣做的好處是避免了通道間的相互影響,開關邏輯也相對簡單。以如圖4所示典型的八姿控發(fā)動機“橫平豎直”布局形式為例。如果2#,5#發(fā)動機單獨控制俯仰,1#,3#,4#,6#發(fā)動機單獨控制滾轉(zhuǎn),7#,8#發(fā)動機單獨控制偏航,通道間可實現(xiàn)獨立控制,達到人為解耦控制的效果。然而解耦帶來的問題是在某一個通道上只能產(chǎn)生一組控制力矩,例如,利用1#、4#發(fā)動機同時控制滾轉(zhuǎn)時,可能會造成控制力矩過大,產(chǎn)生較大的,影響控制的平穩(wěn)性。如果利用1#,3#,4#,6#發(fā)動機同時控制滾轉(zhuǎn)和偏航,即對這2個通道進行耦合控制,不僅可以去掉7#,8#發(fā)動機,而且在一個姿控發(fā)動機同時控制2個通道時,可降低其在每一個通道的控制力矩從而提高控制的平穩(wěn)性。
合理利用耦合,還可以提供更為豐富的控制力矩檔位選擇。以圖3所示的“T”型布局為例:
如果通道是獨立控制的,在滾轉(zhuǎn)通道上,只能存在1#,4#發(fā)動機對開或者3#,6#發(fā)動機對開的情形,控制力矩檔位只有1種。同理,在偏航通道上也只有一種控制力矩檔位;而如果通道是耦合控制的,在滾轉(zhuǎn)通道上,既可以1#,4#發(fā)動機對開或者3#,6#發(fā)動機對開,又可以只開其中一個,這樣,就存在2種控制力矩。在偏航通道亦然。由此可見,通過利用耦合,使得在滾轉(zhuǎn)和偏航通道上都增加了控制力矩檔位,這樣就可以在大角度機動或者大干擾存在時使用較大的控制力矩,在平穩(wěn)飛行時采用較小的控制力矩。這將大大提高滾轉(zhuǎn)和偏航的控制效果。
當然,利用耦合為控制器的設計帶來了一定的困難,如果控制器設計不好,可能會適得其反。這就要求進一步提高控制器的設計水平。
2.4 姿控發(fā)動機布局基本原則
飛行器姿控發(fā)動機布局方式的設計是一個比較復雜的問題,需要兼顧很多因素。通過分析,飛行器姿控發(fā)動機的布局設計應該遵循以下基本原則:
(1)盡量增大最大控制力矩;
(2)盡量減小最小控制力矩;
(3)盡量增加控制力矩的檔位選擇。
3 耦合效果的仿真分析
利用耦合是解決姿控發(fā)動機布局設計矛盾的一種有效途徑。為了考察耦合對姿態(tài)控制的效果,本文采用圖3所示的“T”型布局形式的飛行器進行仿真。
考察2種方案:方案一采用三通道獨立控制的方式;方案二則利用了姿控發(fā)動機在滾轉(zhuǎn)和偏航通道間的耦合控制。
在無干擾的情況下,姿態(tài)角跟蹤精度和最大角速度仿真結果見表1。
由表1可知,在無干擾時,方案二較方案一在3個通道的穩(wěn)態(tài)跟蹤精度和平穩(wěn)性均有明顯的改善。
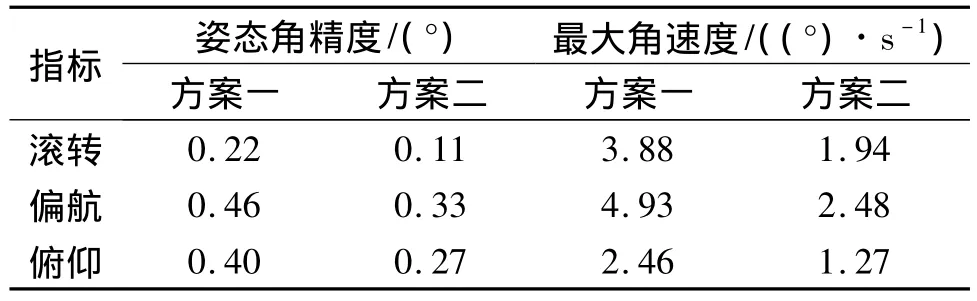
表1 無干擾時的姿控性能Table 1 Attitude control performance without disturbance turques
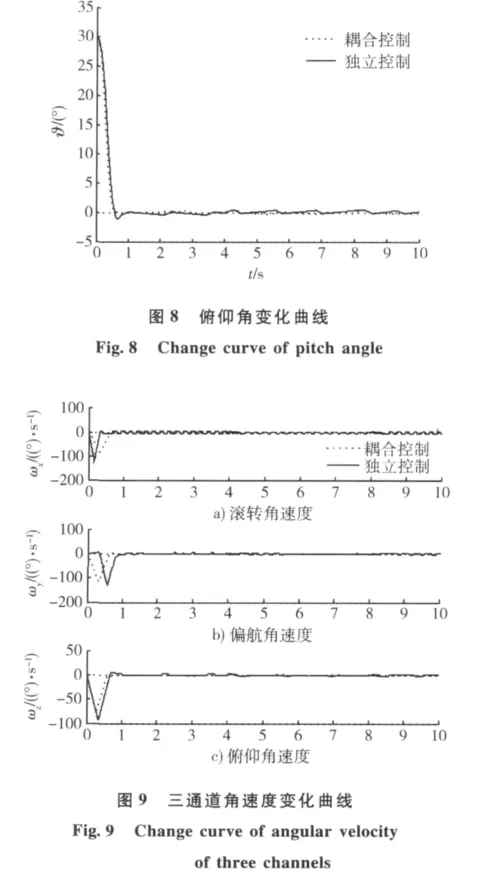
為了觀察在干擾存在時的抗干擾能力,在仿真中引入常值干擾。仿真得到的姿態(tài)角跟蹤精度和最大角速度如表2所示,各通道的姿態(tài)角以及角速度變化曲線如圖6~9所示。
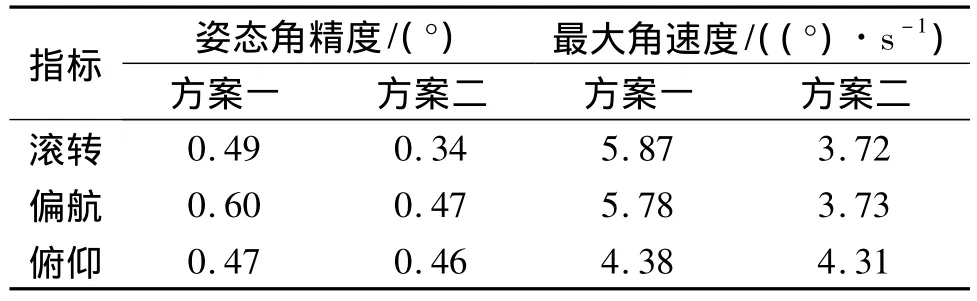
表2 有干擾時的姿控性能Table 2 Attitude control performance with disturbance torques
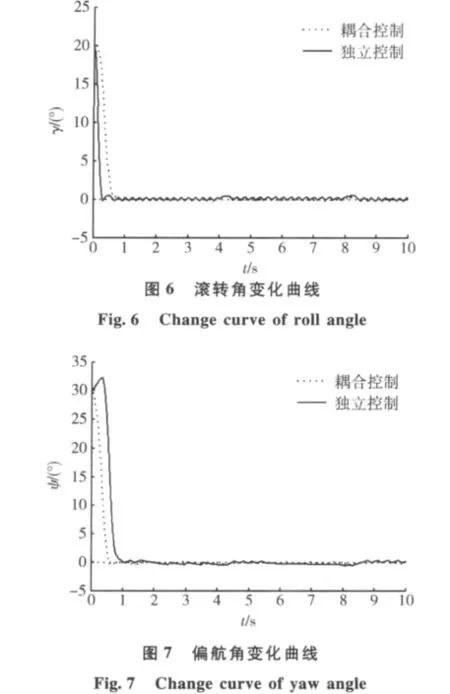
由圖6~9以及表2可知干擾存在時,方案二在滾轉(zhuǎn)和偏航通道上的姿態(tài)角跟蹤精度和平穩(wěn)性均比方案一效果好,因此在抗干擾能力方面要優(yōu)于方案一。在俯仰通道上,2種方案效果并無明顯的差別,這是因為無論耦合控制還是獨立控制,對俯仰通道并無影響。
由圖6,7還可以看出,在方案一中,偏航通道響應滯后于滾轉(zhuǎn)通道的響應。這是由于方案一采用三通道獨立控制,遇到滾轉(zhuǎn)和偏航都需要大角度機動的情況,就需要設計成滾轉(zhuǎn)優(yōu)先造成的。這也是三通道獨立控制的弊病,而采用耦合控制,則可以避免這種情況的出現(xiàn)。
4 結束語
姿態(tài)控制技術是控制系統(tǒng)的關鍵技術之一,而姿控發(fā)動機的布局為飛行器姿態(tài)控制提供了硬件條件。姿控發(fā)動機布局的優(yōu)劣,直接影響到飛行器姿態(tài)控制效果。姿控發(fā)動機的布局設計既需要考慮控制性能要求,又需要結合現(xiàn)有的技術水平和設計經(jīng)驗,綜合考慮各種因素,在各種要求下尋找折中方案。利用耦合可以在一定程度上提高控制效果,是一個值得深入研究的控制策略。
[1] 郭清晨.常值推力姿態(tài)控制方法研究[D].哈爾濱:哈爾濱工業(yè)大學,2006.
[2] RICARDO S,Sanchiez Pena,Roberto Alonso,et al.Robust Optimal Solution to the Attitude/Force Control Problem[J].IEEE Transaction on Aerospace and Electronic System,2000,36(3):784-791.
[3] 王建德,包立平.新概念武器在地面防空中的應用(中)[J].地面防空武器,2000,(4):12-29.
[4] PRINS W,SPENCER A,ROBERTS J.SM-3 SDACS Flight Test Successes[R].AIAA 2003-4 664.
[5] 程英容,張奕群.基于四元數(shù)反饋線性化的飛行器姿態(tài)控制方法研究[J].航天控制,2007,25(107):14-16.
[6] 胡小平,王中偉,張為華,等.姿控發(fā)動機布局方式優(yōu)化分析[J].國防科技大學學報,1997,19(2):5-9.
[7] WEISS H.Status of the First LEAP Space Flight Test[R].AIAA-92-1 069.
[8] 奚勇,張巍巍.一種用于導彈姿態(tài)控制系統(tǒng)的直接力非線性控制法[J].上海航天,2007,(3):42-45.
[9] 圖善澄.衛(wèi)星姿態(tài)動力學與控制[M].北京:中國宇航出版社,2005:184.
[10] 程英容,張奕群.考慮姿控發(fā)動機布局耦合影響的飛行器姿態(tài)控制方法研究[J].現(xiàn)代防御技術,2008,36(5):41-45.
猜你喜歡
科學大眾·小諾貝爾(低幼)(2025年4期)2025-04-18 00:00:00
數(shù)學雜志(2022年4期)2022-09-27 02:42:48
中老年保健(2021年2期)2021-08-22 07:29:58
童話世界(2020年13期)2020-06-15 11:54:50
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2013年5期)2013-03-11 16:08:17
