低電壓大電流異步電動機的過流保護
2012-01-22 01:14:28萬文斌蘇振東陳鵬程孫晨光
大電機技術 2012年6期
關鍵詞:檢測
萬文斌,蘇振東,陳鵬程,孫晨光
(合肥工業大學 電氣與自動化工程學院,合肥 230009)
前言
在電動叉車領域中,存在著直流電動機驅動和異步電動機驅動兩種。直流電動機具有良好的啟動特性和調速特性,但是它存在著直流換向問題,結構復雜,維護檢修不方便,而且消耗有色金屬多。異步電動機的啟動特性和調速特性不如直流電動機,但是異步電動機的結構簡單,維護檢修也方便,更為重要的是它不存在換向問題。隨著電力電子技術的發展,異步電動機的調速特性越來越好,逐漸成為電動叉車驅動控制領域的主流。在電動叉車領域中,異步電機驅動都具有低電壓大電流的特點,所以過電流保護非常重要。
1 電流檢測
系統利用霍爾元件來實現對信號的檢測,霍爾元件應用的基本原理是霍爾效應。霍爾效應是一種磁敏效應,如在半導體薄片的長度方向上施加一定磁感應強度的磁場,則在寬度方向上產生電動勢。電機電流在磁環內產生感應磁場,感應磁場在霍爾元件上產生感應電動勢,并且感應電動勢與磁感應強度成正比,而磁感應強度又與電流成正比,故而霍爾電壓與電流值成正比,基于這種正比關系可以實現對電機電流的檢測。
用霍爾元件UGN3503LT和磁環構成電流信號檢測電路。UGN3503LT由電壓調整器、霍爾電壓發生器、線性放大器和射極跟隨器組成,其輸入是磁感應強度,輸出是電壓。電流檢測信號原理示意圖如圖 1所示:
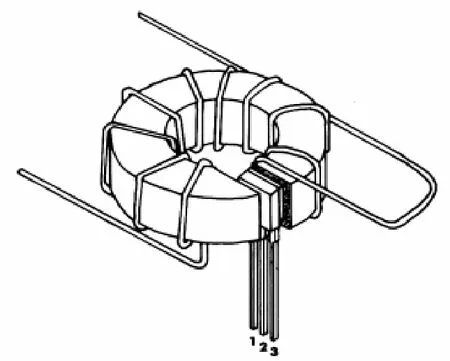
圖1 UGN3503LT電流檢測信號示意圖
圖1 中,UGN3503LT的 1腳接穩壓器輸出的+5V電源,2腳接地,3腳為電壓輸出端。在磁環上的繞線與電機繞組串聯,磁環上繞線匝數為1。當電源為+5V且磁場強度為0T時,UGN3503LT的輸出為2.5V,并有較高的靈敏度。UGN3503LT的有效輸出范圍為1V~4V,而TMS320LF2407的A/D采樣口的允許電壓范圍為0V~3.3V,因而需要轉換電路。在實踐中,系統對三相電機中的兩相電流進行采樣,另一相可以根據三相電流和為零的原理計算出來。其轉換電路如圖所示:
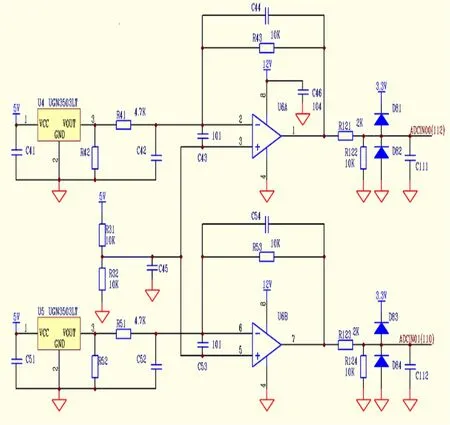
圖2 電流檢測電路
霍爾元件的輸出電壓VOUT與DSP的A/D采樣口輸入端的電壓VAD之間的關系為:

在實踐中,磁環上繞線匝數為1匝,電機電流產生的感應磁場與電機電流之間不是純粹的線性關系。如果每次電機電流增加10A,對應的霍爾元件輸出的電壓幅值隨著電機電流的增大而變大。當電機電流由40A增加到50A時,對應的霍爾元件輸出的電壓幅值為0.02V;當電機電流由70A增加到80A時,對應的霍爾元件輸出的電壓幅值為 0.05V。為了確定電機電流與DSP的A/D采樣口的電壓關系,采用多點測量再進行數據擬合的辦法。
由于霍爾元件為磁感應元件,容易受環境影響,所以應對系統進行初值消除。當 DSP得到采樣信號時,DSP開始把霍爾元件采集的數據減去零電流值進行初值消除,提高測量精度。
2 硬件過電流保護
系統的功率模塊采用功率 MOS管,其驅動模塊采用IR2110S驅動芯片。IR2110S具有獨立的低端和高端輸入通道;懸浮電源采用自舉電路,其高端工作電壓可達600V,在15V下靜態功耗僅為116mW;邏輯電源電壓范圍為 3.3V~20V,可方便地與 TTL或CMOS電平相匹配。開通、關斷延遲時間小,分別為120ns和 94ns。
由于DSP軟件處理時間為毫秒級別,來不及處理瞬時過電流和短路電流。如果 MOSFET管被瞬時擊穿,進而導致換相紊亂,從而損壞MOSFET管,因而需要硬件保護電路。功率模塊硬件保護電路圖如下所示:
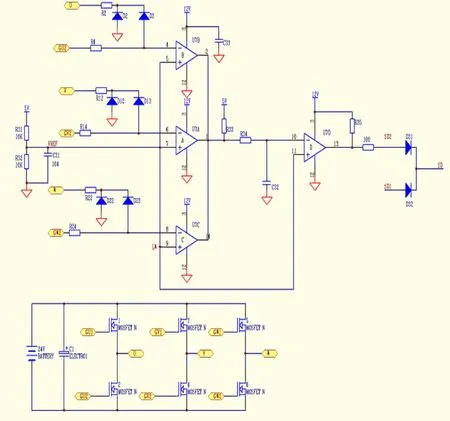
圖3 功率模塊硬件保護電路
以第一相為例,其他兩相相同。VU和VGU2有四種情況:同時為高,同時為低,VU為高而VGU2為低,VU為低而VGU2為高。假如2管(2管為MOSFET 2)關斷時,VGU2為低電壓,此時硬件保護電路輸出的VSD為低電壓,IR2110S正常工作。假如 2管開通且電流不大,VGU2為高電壓,而VU為低電壓,二極管D3導通,將放大器的負端引腳的電壓值鉗制為VU的電壓值加上二極管的導通壓降。VU的電壓值為流過2管的電流值與2管的導通電阻值的乘積,由于電流不大,VU的電壓值與二極管的導通壓降之和小于VVREF,VSD為低電壓,IR2110S正常工作。假如 2管開通且電流較大,VU和VGU2同時為高,VU的電壓值與二極管的導通壓降之和大于VVREF,VSD為高電壓,IR2110S立即關閉,所有功率管都關斷,從而保護功率模塊不被擊穿。
如果逆變電路出現短路的情況,電流瞬間就會變得很大,VSD就為高電壓,IR2110S立即關閉,所有功率管都關斷,進而保護了整個電路。由于逆變電路接的負載為電機,電流中就不可避免出現毛刺,就會有VU和VGU2同時為低的情況,二極管D2導通,從而將VU的電壓值鉗制為0,使得2管承受的反向電壓不高。
3 程序設計
系統軟件采用 CCS3.3平臺進行編程,主程序由以下幾個部分組成:
(1)DSP上電復位運行后對各種內存單元進行初始化,設定各個端口的參數,然后計算電機運行所需參數。
(2)進行上電檢測、方向開關檢測以及 SRO、HPD檢測。如果通過檢測,則進入下一階段;如果沒有通過檢測,則循環檢測,直到通過為止。
(3)進行A/D采樣和運行模式選擇。運行模式分為兩種:快速啟動模式和一般啟動模式。實驗中采用一般啟動模式。
(4)判斷采樣電流是否大于上限值。如果是,則進行過流保護處理;如果不是,則進行電流補償。由于控制對象為低壓大電流異步電機,電流比較大,而電機電壓較低,在電機定子繞組上的壓降損耗就不能忽略不計,故而得進行電流補償。
(5)進入 SVPWM 發波中斷。如果電源關斷,則整個運行過程結束;如果電源仍然開通,則進行上電檢測,循環運行。
主程序流程框圖如圖4所示:
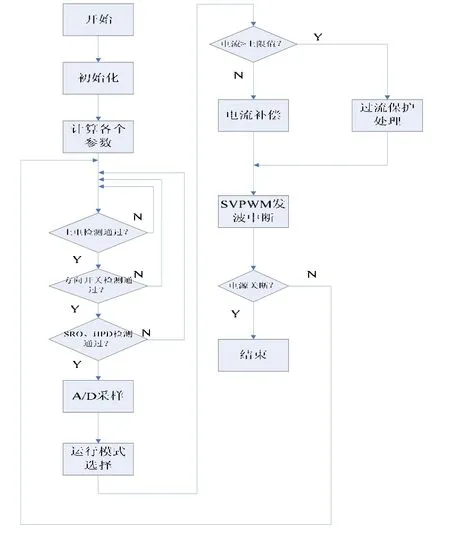
圖4 主程序流程圖
4 實驗結果
實驗中所設定的電流上限值為100A。實驗波形為UGN3503LT的 3腳輸出的電壓波形,電機電流為100A時,對應的電壓波形的峰峰值為2V。有四個實驗波形,分別如下所示。
空載穩定時的電流波形如圖5所示。
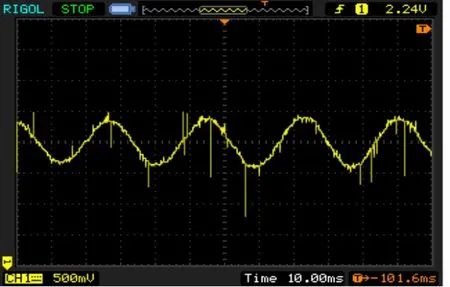
圖5 空載穩定時的電流波形
突加負載時的電流波形如圖6所示。
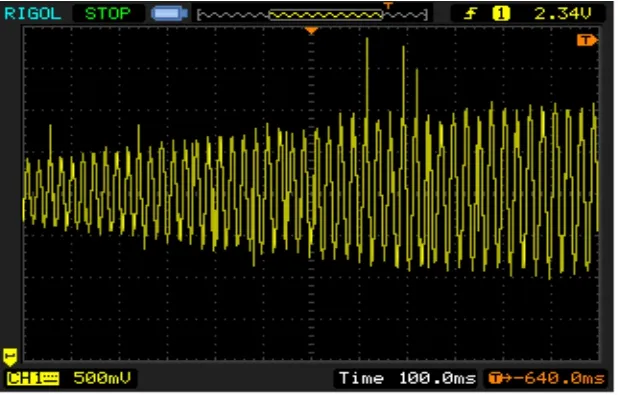
圖6 突加負載時的電流波形
帶載穩定時的電流波形如圖7所示。

圖7 帶載穩定時的電流波形
帶載起動時的電流波形如圖8所示。

圖8 帶載起動時的電流波形
5 結論
由實驗結果可以看出,無論是帶載起動還是突加負載,示波器顯示的電流波形的峰峰值始終在2V以內,即電機電流控制在100A以內,足可顯示此系統過流保護功能良好。在實驗波形中,確實存在毛刺,在進行A/D轉換之前,會進行一次電路濾波處理。在程序里,還會對電流采樣值進行一次濾波,這樣可以減小毛刺的影響。
選用霍爾元件 UGN3503LT和 DSP系列中的TMS320LF2407設計出15V/100A的異步電機過流保護,具有電流檢測、過流保護和短路保護等功能。經過實驗證明,此系統反應速度快、操作方便以及可靠性高,能夠實現對電機過流保護的設計要求,可使用于類似的系統中。
[1]梁碩, 董愛華, 常波. 基于霍爾檢測原理的大中型電機過電流保護研究[J]. 自動化技術與應用, 2009.
[2]王香婷, 蘇曉龍. 基于霍爾傳感器的電流檢測系統[J]. 工礦自動化, 2008.
[3]萬文斌, 李飛. 基于DSP的車用低壓電機矢量控制系統的研究[J]. 微電機, 2011.
[4]顧繩谷. 電機及拖動基礎[M]. 北京: 機械工業出版社, 2003.
[5]王曉明, 王玲. 電動機的 DSP控制[M]. 北京:北京航空航天大學出版社, 2004.
[6]鄒彥, 唐冬, 寧志剛, 王毓銀. DSP原理與應用[M]. 北京: 電子工業出版社, 2005.
[7]王成元, 夏加寬, 楊俊友, 孫宜標. 電機現代控制技術[M]. 北京: 機械工業出版社, 2006.
[8]康華光, 陳大欽. 電子技術基礎 M]. 北京: 高等教育出版社, 2004.
[9]湯蘊璆, 史乃[M]. 電機學. 北京: 機械工業出版社, 2005.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
