轉子-軸承系統混沌運動的神經網絡反饋控制方法
2012-02-13 09:01:02張順浩鄭鐵生
振動與沖擊 2012年11期
張順浩,鄭鐵生
(1.朝鮮理科大學 數學及力學系,朝鮮平壤恩情區;2.復旦大學 力學與工程科學系,上海 200433)
在具有滑動軸承的轉子系統中,油膜力是轉子失穩的主要因素之一。當系統某些參數(旋轉速度,間隙等)改變時,系統會發生倍周期或概周期分岔直至進入混沌運動。因此研究該類系統的振動特性,穩定性及其控制一直是轉子動力學的重要課題。國內外許多文獻對該類系統進行了研究。Shen等[1]用基于變分不等方程的油膜力計算方法分析了轉子-軸承系統的非線性動力學特性;平衡轉子的Hopf分叉,不平衡轉子的周期振動,概周期振動和混沌振動。徐小峰和張文[2]指出對于不平衡轉子-軸承系統,隨著質量偏心的增大,運動變得復雜,隨著轉速的增大,周期渦動,倍周期分叉,混沌運動交替出現。近年來,應用電磁力作為控制力源的電磁主動控制引起許多學者的重視。Das[3]和 Chen-Chao Fan 等[4]在轉軸上設置了電磁激勵機,研究了轉子-軸承系統振動控制方法。利用轉子-軸承系統的周期振動反饋信號和預知的反饋控制強度,實現激勵機極線圈電流的PD控制,使轉子和極表面之間的電磁力抑制轉子周期振動的振幅,但未涉及系統混沌運動的控制。
神經網絡已被廣泛應用模式識別和圖像處理,控制和優化,預報和智能信息管理以及通信空間科學等領域[5-6]。Ramesh 等[7]把神經網絡跟 OGY 控制方法和Pyragas的反饋控制方法分別結合,研究了VDP振動子的控制問題。譚文和王耀[8]用人工神經網絡,實現了Henon映射混沌運動的控制。Qin等[9]提出了一個用BP神經網絡控制混沌舉動的方法。這些方法所針對的非線性方程具有解析式簡單,目的狀態明確的特點,因此其混沌運動也易于控制。
本文將Pyragas的反饋控制方法[10-11]和神經網絡結合,在反饋控制強度的計算上采用間接誤差計算的BP算法和自適應學習率的BP算法結合而形成的改進型BP神經網絡方法,不需要較多的系統先驗知識,比如,油膜力的解析表達式,不穩定周期軌道等,因而更能適應工程轉子-軸承系統混沌振動控制的實際要求。用此改進型BP神經網絡方法研究了一個具有兩個自由度的非線性轉子-軸承系統的混沌振動控制問題,以神經網絡控制代替反饋控制強度的復雜計算過程。即當嵌入在混沌吸引子中的不穩定周期軌道未知的情況下,以系統輸出的混沌信號為網絡輸入,通過神經網絡學習追尋滯延反饋控制強度,把反饋控制信號施加到轉子上以消除混沌運動,使嵌入在混沌吸引子中的不穩定周期軌道回到穩定周期軌道上。
1 轉子-軸承系統的數學模型
Jeffcott剛性轉子-軸承系統動力學模型如圖1所示。圖中,O為軸瓦幾何中心,O-x1x2靜止坐標系;Oj為軸頸幾何中心;Oc為轉子質心;G=1/(σm)為無量綱載荷;fx1和fx2分別為無量綱非線性油膜力的水平,垂直分量;ω為轉子角速度。
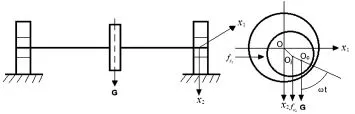
圖1 Jeffcott剛性轉子-軸承系統動力學模型Fig.1 Configuration of Jeffcott rotor-bearing system
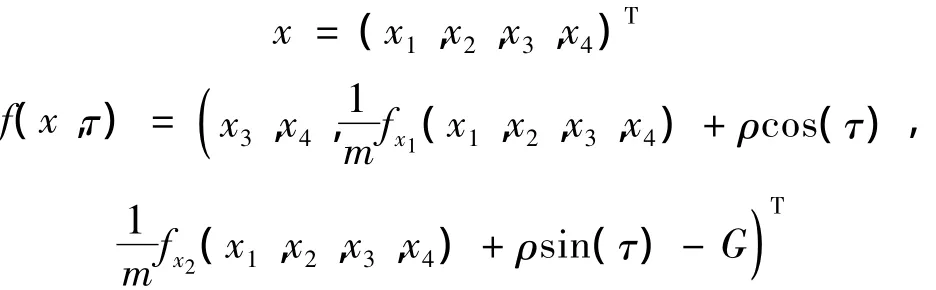
無量綱形式的Jeffcott剛性轉子-軸承系統狀態方程為:

其中:
非線性油膜力和,由文獻[12-13]確定為:

其中:

2 控制系統和神經網絡學習
根據非線性方程(1),變量x1,x2相互耦合。因此只針對一個變量實施反饋控制,就能達到控制系統振動的目的,這樣在實踐中也更易于實行。反饋控制采用文獻[3-4]方案,如圖2所示。設x0(τ)是方程(1)的不穩定周期軌道,并且系統已進入混沌運動x(τ)。我們的目的是通過實施反饋控制,使混沌運動重新回歸穩定周期運動。
系統的反饋控制方程可寫為:


其中Dxf(x0(τ),τ)為非線性函數f(x,τ)的雅可比矩陣,顯然它是T周期函數。根據Floquet理論,上述方程(3)有正規解 δx=exp(s,τ)y(τ),其中s為 Floquet指數,函數y(τ)為T周期函數。于是方程(2)中的反饋項為:

從而得到方程(2)的周期變系數線性微分方程:

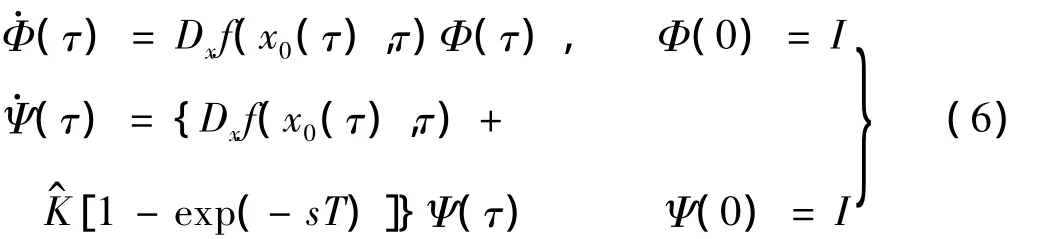
該方程的Floquet乘子λ=exp(sT)和反饋強度k之間滿足如下關系:
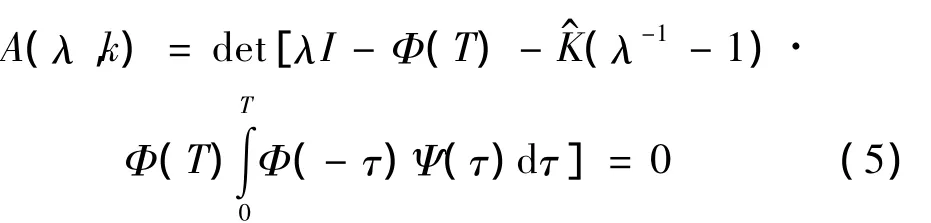
式(5)的Φ,Ψ分別為方程(3)和方程(4)的基本解矩陣,分別由下面的矩陣線性微分方程確定:
采用神經網絡的控制系統的框圖和實現方案如圖2所示。
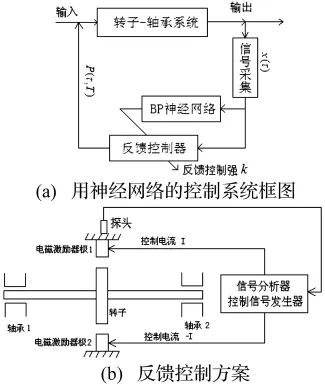
圖2 用神經網絡的控制系統框圖與反饋控制方案Fig.2 Diagram of chaos control system using neural net and feedback control scheme


上式中E為輸出層的學習誤差;0<μ<1為慣性系數,可提高收斂速度,抑制寄生振蕩,改善動態性能;0<γ<1為學習率,為加快算法的收斂速度,令:
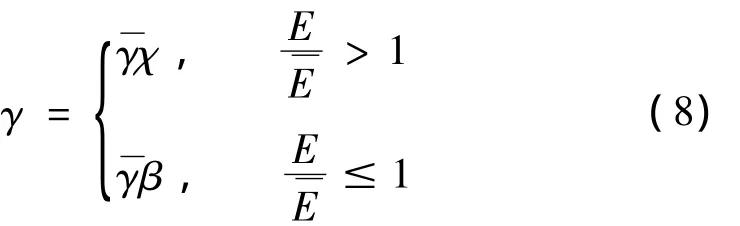
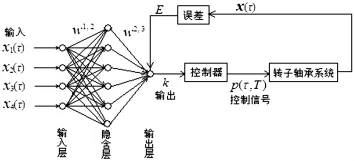
圖3 具有2層的BP神經網絡的結構和學習Fig.3 Back propagation neural net course
3 數值仿真
取m=70,σ =0.1,由文獻[13]可知:當 0.05 < ρ<0.1時,系統(1)處于周期運動狀態;當 0.1<ρ<0.245時,處于倍周期分叉狀態;當0.245 <ρ<0.26 時,處于概周期運動狀態;當0.26<ρ<0.37時,處于混沌運動狀態;當0.37<ρ<0.5時,為周期運動狀態。當ρ=0.31 時,x1(τ),x2(τ),的時域波形,功率譜,軸心軌跡分別如圖4所示。

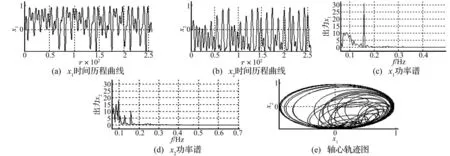
圖4 控制前的系統的響應(ρ=0.31)Fig.4 The system response without control(ρ=0.31)
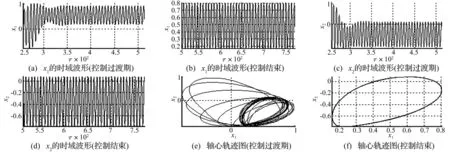
圖5 控制x1的過渡期和結束后的系統的響應Fig.5 The system response with control of x1
4 結論
本文采用改進型BP神經網絡方法,實現了剛性Jeffcott轉子-軸承系統的混沌振動控制。當無量綱偏心為ρ=0.31時,系統進入混沌運動。引入滯延反饋控制,通過間接誤差計算的BP神經網絡學習方法和自適應學習率BP算法,獲得恰當的反饋控制強度,使嵌入在混沌吸引子中的周期為2π的不穩定周期軌道回到穩定周期軌道上。在網絡訓練過程中,根據轉子-軸承系統的輸出,自動追尋滯延反饋控制強度。從數值仿真曲線可知,該方法具有控制反應快,所施控制小的特點,控制效果跟控制變量的選擇無關。特別是,對工程實際轉子-軸承系統,采用電磁激勵器控制,對于油膜力無解析表達式,而且不穩定周期軌道未知的場合,該方法尤為有效。
[1] Shen G Y,Xiao Z H,Zhang W,et al.Nonlinear behavior analysis of a rotor supported on fluid-film bearing[J].Journal of Vibration and Acousti-cs,2006,128:35-40.
[2]徐小峰,張 文.一種非穩態油膜力模型下剛性轉子的分岔和混沌特性[J].振動工程學報,2000,13(2):247-253.
[3]Das A S,Nighil M C,Dutt J K.Vibration control and sta-bility analysis of rotor-shaft system with electromagn-eticexciters[J].Mechanism and Machine Theory,2008,43:1295-1316.
[4] Fan C C,Pan M C.Fluid-induced instability elimination of rotorbearing system with an electro-magnetic exciter[J].International Journal of Mechanical Sciences,2010,52:581-589.
[5]Yong K.Theory of intelligent neural network[M].D.P.R.Korea Pyongyang University of Science Press:Kim Yong Hi,2009.
[6]王耀南.計算智能信息處理技術及其應用[J].長沙:湖南大學出版社,1999.
[7]Ramesh M,Narayanan S.Chaos control of Bonhoeffer-Van der Pol oscillator using neural networks[J].Chaos,Solitons and Fractals,2001,12:2395-2405.
[8]譚 文,王 耀.非線性系統混沌運動的神經網絡控制[J].物理學報,2002,51(11):2463-2466.
[9] Qin W Y,Yang Y F,Zhang J F.Controlling the chaotic response to a prospective externalsignalusing backpropagation neural networks[J].Nonlinear Analysis:Real World Application,2009,10:2985-2989.
[10] Pyragas K.Continuous control of chaos by self-controlling feedback[J].Phys Lett A,1992,170:421-428.
[11] Hiroyuki N J.On analytical properties of delayed feedback control of chaos[J].Phys Lett A,1997,232:207-210.
[12]黃文虎,夏松波,焦映厚,著.旋轉機械非線性動力學設計基礎理論與方法[J].北京:科學出版社,2006.
[13] Adiletta G,Guido A R,Rossi C.Chaotic motions of a rigid rotor in short journal bearings[J].Nonlinear Dynamics,1996,10:251-269.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
