飛機雙余度全電剎車驅動控制器設計與研究
2012-02-22 08:22:06戴志勇
微特電機 2012年7期
關鍵詞:信號
戴志勇,林 輝,郭 皓
(西北工業大學,陜西西安,710129)
0 引 言
隨著全電飛機技術研究的日益升溫,作為全電飛機關鍵技術之一,全電剎車取代傳統的液壓剎車已是大勢所趨。近年來,國內外學者對此進行了大量的研究[1-3]。文獻中,剎車作動器采用無刷直流電動機,取得了不錯的剎車性能。然而,飛機剎車過程干擾大、工作環境惡劣,全電剎車驅動控制器故障率相對較高。為了提高飛機剎車系統的可靠性,保證飛機安全著陸,本文以雙余度無刷直流電動機為作動器本體,采用冗余技術,設計了飛機雙余度全電剎車驅動控制器。
1 驅動控制器整體設計
為了提高飛機剎車系統的可靠性,本文將無刷直流電動機繞組、霍爾傳感器、壓力傳感器、驅動主電路、驅動電源和控制電源采用了余度設計。驅動控制器整體設計如圖1所示。在剎車系統中,驅動控制器由兩個獨立的直流28 V控制電源和兩個獨立的直流270 V驅動電源供電。其接收剎車壓力給定信號和雙余度壓力傳感器反饋的兩路剎車壓力反饋信號,經信號調理電路輸入控制電路。控制電路采取壓力跟蹤和余度管理等控制策略,分別通過兩路電氣隔離的驅動主電路控制雙余度無刷直流電動機的兩個繞組。
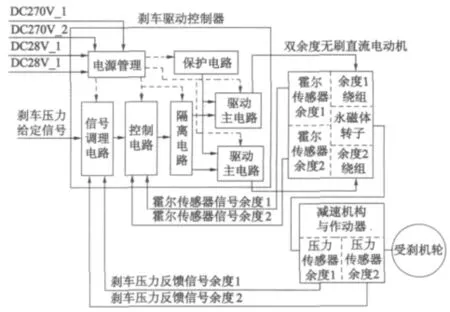
圖1 剎車驅動控制器整體結構
1.1 硬件設計
驅動控制器硬件設計如圖2所示。硬件整體可分為剎車壓力反饋調理電路、剎車壓力給定接收電路、DSP最小系統、CPLD最小系統、隔離電路、功率驅動電路、電流采集電路、過流保護輔助電路和電源系統9個部分。剎車壓力給定信號和剎車壓力反饋信號經過各自的調理電路,輸入DSP的AD端口,進行模數轉換,DSP接收到剎車開機指令后,通過控制程序調節,經DSP的事件管理器,輸出分別控制電機兩個繞組的占空比信號。CPLD將占空比信號和電機霍爾信號進行邏輯運算,分別輸出控制兩個電機繞組運轉的調制換相信號,經隔離電路和功率驅動電路,控制雙余度無刷直流電動機運行。當電機出現過流故障時,過流保護輔助電路輔助程序關斷占空比信號,從而排除過流故障。電流采集電路采集每個繞組的母線電流,從而實現均流策略。

圖2 驅動控制器硬件設計
1.2 控制策略設計
驅動控制器控制策略設計如圖3所示。控制策略采用壓力外環和均流內環控制。當系統在雙余度工作模式下運行時,驅動控制器接收壓力給定和壓力反饋信號,經壓力PID調節器調節輸出,為了使雙余度電機的兩套繞組出力相同,將壓力環輸出平分作為兩個均流環的給定,通過經典的PID調節器,實現繞組電流均衡,最終實現剎車壓力給定跟蹤剎車壓力反饋。
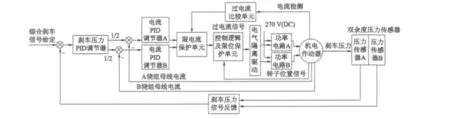
圖3 驅動控制器控制策略
2 剎車驅動器仿真模型
為了驗證飛機剎車驅動控制器的整體性能,本文利用MATLAB/Simulink,建立了雙余度無刷直流電動機本體和系統整體的數學模型,并進行了仿真驗證。
2.1 雙余度無刷直流電動機數學模型
在本系統中,雙余度無刷直流電動機的額定電壓U=270 V,額定功率P=270×2 W,額定轉速n=9 000 r/min。電機的定子由兩個在空間上互差30°電角度的Y型連接的繞組構成,兩套繞組彼此電氣隔離,且共用一個永磁體轉子。為了建立電機數學模型,做以下假設[4-6]。
(1)電機磁路不飽和;
(2)氣隙磁場為方波;
(3)電機繞組、轉子磁場分布均勻;
(4)不考慮電機的電樞效應、換向過程、齒槽效應、渦流損耗和磁滯損耗。
可得電機的電壓平衡方程:
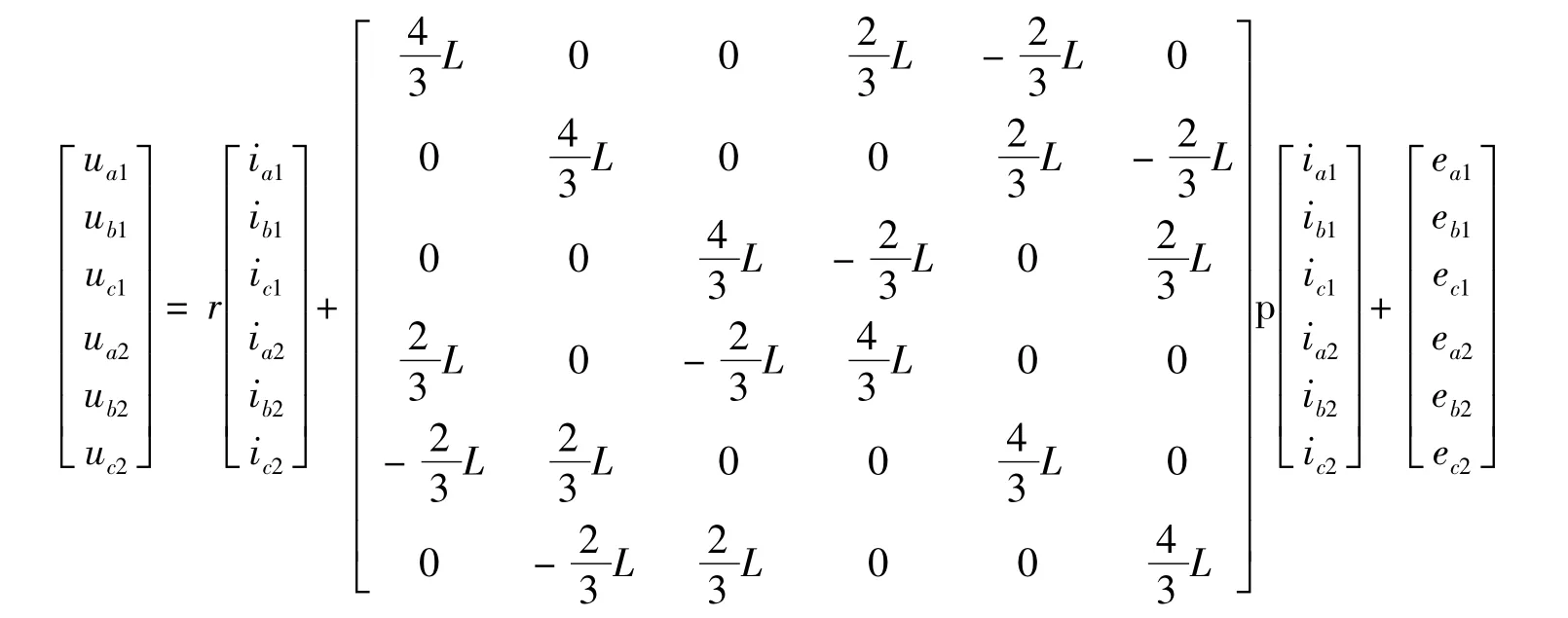
式中:ea1(2)、eb1(2)、ec1(2)分別為余度 1(2)的 A、B、C相繞組的相反電動勢;ia1(2)、ib1(2)、ic1(2)分別為余度1(2)的 A、B、C 相繞組的相電流;ua1(2)、ub1(2)、uc1(2)分別為余度1(2)的A、B、C相繞組相電壓;L為每相繞組的自感;p為微分算子,
電機的電磁方程:

電機的機械運動方程:
式中:Te為電機的電磁轉矩;J為轉子的轉動慣量;ω為機械角速度;TL為負載轉矩;B為粘滯摩擦系數。
根據以上數學模型,在MATLAB/Simulink下,搭建雙余度無刷直流電動機的仿真模型。電機在雙余度開環下運行,在0.05 s時,突加1 N·m負載的仿真結果如圖4所示。
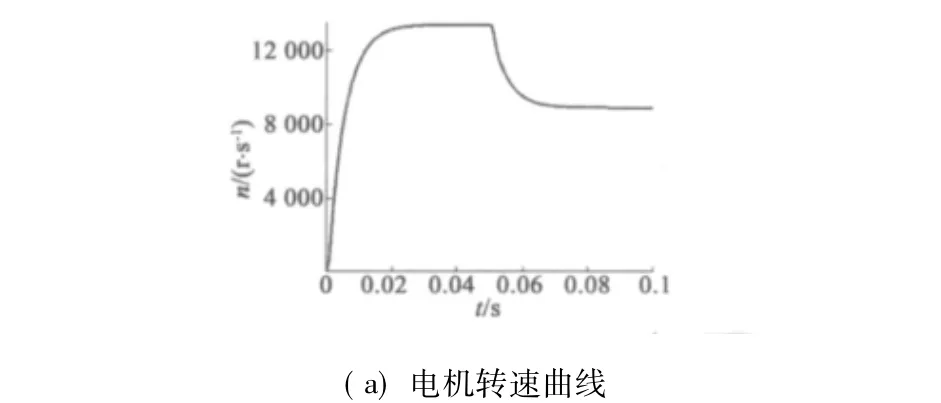
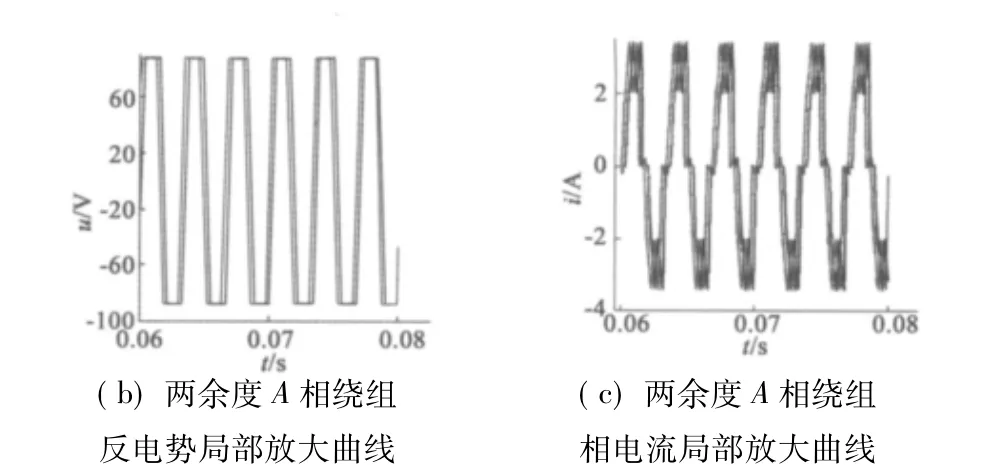
圖4 電動機雙余度開環運行0.05 s突加負載仿真結果
圖4(a)是電機轉速曲線,在0.05 s時,由于突加1 N·m負載,開環轉速下降。圖4(b)和圖4(c)分別是兩余度A相繞組反電勢局部放大波形和相電流局部放大波形。由于電機兩個余度繞組在空間上互差30°電角度,電機余度2繞組的相反電勢和相電流滯后余度1繞組30°電角度。
2.2 系統整體仿真模型
系統整體仿真模型如圖5所示。
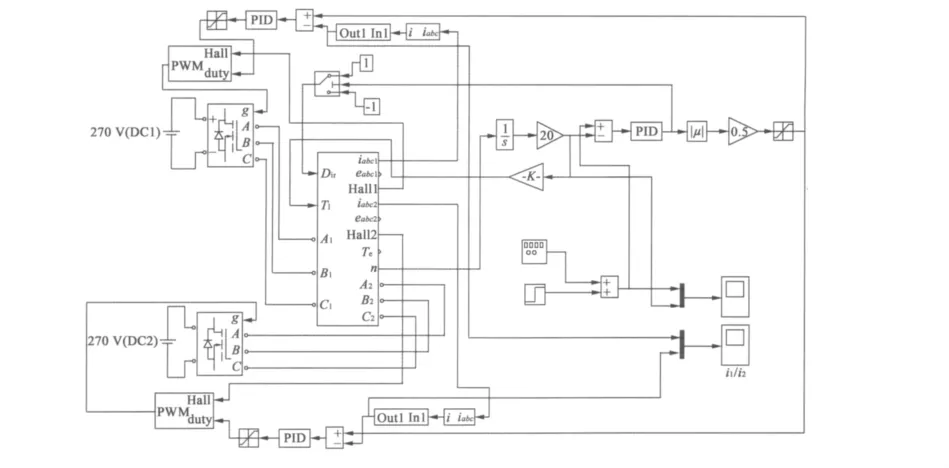
圖5 系統整體仿真模型
模型中采取壓力外環和均流內環的控制策略,壓力給定信號和壓力反饋信號作差,經壓力環PID調節,結果平分輸入均流環,作為兩個均流環的給定信號。均流環將給定信號與各個余度母線電流信號進行PID調節,輸出進入PWM生成單元。PWM生成單元同時接收電機換相信號,生成換相調制信號分別觸發兩個獨立的逆變器的開關管動作,從而控制電機,使系統對剎車盤施加的壓力跟蹤剎車壓力給定信號。
在MATLAB/Simulink下,對系統整體進行仿真,當壓力給定為10 000 N的階躍信號時,其仿真結果如圖6所示。當壓力給定為7 000+3 000sin 10t時,仿真結果如圖7所示。在圖6(a)和圖7(a)中,剎車壓力反饋曲線能夠很好跟蹤剎車壓力給定信號。圖6(b)和圖7(b)中,經過均流控制,兩個余度繞組的母線電流達到均流效果。

仿真結果表明,剎車驅動控制器超調小、動態響應快、穩態誤差小、性能優良,能夠實現均流效果。
3 實驗結果分析
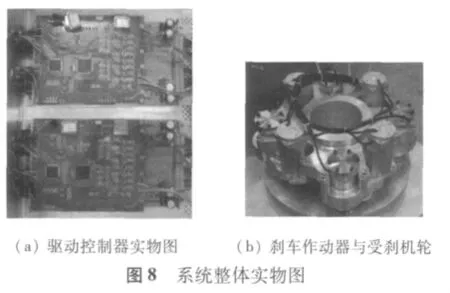
系統整體實物圖如圖8所示。圖8(a)驅動控制器實物圖,圖8(b)是剎車作動器與受剎機輪實物圖。
剎車壓力實測跟蹤曲線如圖9所示。當壓力給定為7 500+2 500sin 0.5t時,壓力跟蹤曲線如圖9(a)所示。其中,波形1為剎車壓力給定,1 V電壓代表5 000 N剎車壓力,波形2為剎車壓力反饋,1 V電壓代表1 000 N剎車壓力。壓力給定為5 000~10 000 N方波時,壓力跟蹤曲線如圖9(b)所示。其中,波形1為剎車壓力給定,1 V電壓代表5 000 N剎車壓力,波形2為剎車壓力反饋,1V電壓代表1 000 N剎車壓力。
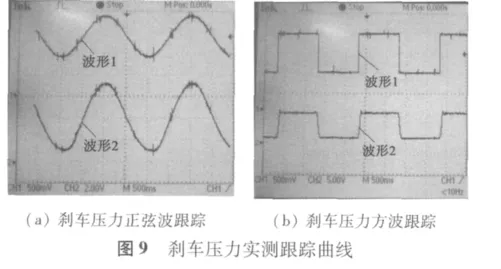
實驗結果表明,剎車壓力反饋能夠很好地跟蹤壓力給定。整個系統超調量小、穩態精度高、性能優良。
4 結 語
為了提高飛機剎車系統的可靠性,本文采用冗余技術,設計了雙余度剎車驅動控制器。以雙余度無刷直流電動機為被控對象,設計了驅動控制器的軟件和硬件。利用MATLAB/Simulink,對雙余度無刷直流電動機本體和系統整體進行了仿真驗證。仿真結果和實驗結果表明,在驅動控制器的控制下,剎車壓力反饋能夠很好地跟蹤剎車壓力給定,整個系統超調小、穩態精度高、性能優良。
[1] Pritchard J.Overview of Landing Gear Dynamics[J].Journal of Aircraft,2001,38(1):130-137.
[2] Garrett T K,Newton K,Steeds W.The Motor Vehicle[M].13rd ed.War-rendale,Pennsylvania:Society of Automotive Engineers,2001.
[3] Limpert R.Brake Design and Safety[M].2nd ed.Warrendale,Pennsylvania:Society of Automotive Engineers,1999.
[4] Li Rong,Liu Weiguo,Ma Ruiqing,et al.Research on current balance in dual-redundancy BLDCM servo system[J].Transactions of China Electrotechnical Society,2005,20(9):77-81.
[5] Ma Ruiqing,Liu Weiguo,Luo Guangzhao,et al.The Balanced Current Control of Dual-Redundancy Permanent Magnetic Brushless DC Motor[C]//Proceedings of the Eighth International Conference on Electrical Machines and Systems.2005:475-479.
[6] 楊永亮.雙余度無刷直流電機控制技術研究[D].西安:西北工業大學,2007
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06