基于操作手柄新模型的電動輪椅運動控制系統(tǒng)
2012-02-22 08:22:10馬瑞卿史國棟相里康
微特電機 2012年7期
張 琳,馬瑞卿,史國棟,相里康
(1.西北工業(yè)大學(xué),陜西西安710072;2.濟寧中銀電化有限公司,山東濟寧272000)
0 引 言
縱觀現(xiàn)階段電動輪椅技術(shù),其控制策略的研究遠滯后于硬件驅(qū)動的發(fā)展。現(xiàn)有的驅(qū)動策略相對簡單,只設(shè)前后左右四個方向檔位,無法進行方向轉(zhuǎn)角跟隨[2],需要實時手動控制,這不符合自動駕駛系統(tǒng)設(shè)計的初衷;而在電動輪椅的基礎(chǔ)上,結(jié)合智能機器人技術(shù)而具備避障等功能的智能輪椅已成為未來發(fā)展的重要方向,這對電動輪椅運動控制策略也就提出了更高的要求。
針對電動輪椅控制系統(tǒng)智能化的發(fā)展趨勢,在操作手柄新模型基礎(chǔ)上,本文對現(xiàn)有的控制策略進行了改進,設(shè)計了一種新的控制模式,以主從電機轉(zhuǎn)速跟隨算法、方向轉(zhuǎn)角位置閉環(huán)算法為核心,對雙電機進行獨立驅(qū)動控制,使電動輪椅可在非實時手控操作下完成直線運行、方向轉(zhuǎn)角跟隨、原地回轉(zhuǎn)等功能。
1 操作手柄新模型
1.1 操作手柄硬件設(shè)計
市場上電動輪椅的操作手柄由方向搖桿與速度選擇按鍵組成。其中方向搖桿設(shè)置前后左右四個方向檔,速度選擇按鍵是數(shù)字電位計。其開環(huán)控制策略相對簡單,對應(yīng)方向搖桿的四個檔位以及設(shè)定的速度,配置了四套的控制指令[2],如表1所示。
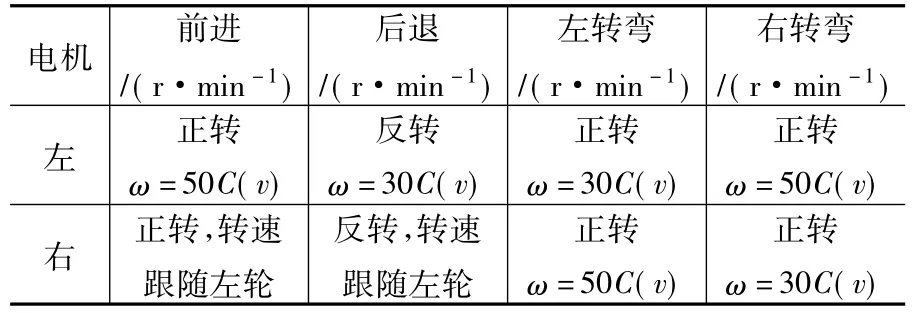
表1 電動輪椅的一種典型的控制策略
這種操作手柄與其開環(huán)控制相匹配,雖簡單可靠,卻固定了回轉(zhuǎn)半徑,限制了電動輪椅的適用范圍;同時開環(huán)控制策略要求用戶必須時刻手動操縱方向搖桿,限制了輪椅的用戶受眾。本文對操作手柄提出了以下的改進,新模型如圖1所示。
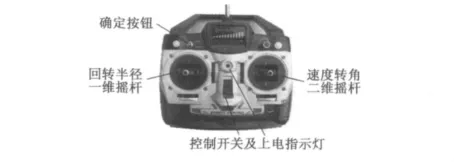
圖1 由航模遙控器改造的電動輪椅控制手柄
(1)與方向轉(zhuǎn)角閉環(huán)控制相匹配。指令給定模式調(diào)整為方向轉(zhuǎn)角外加車體速度的指令集合。
(2)設(shè)計了車體速度與方向轉(zhuǎn)角連續(xù)可調(diào)的速度轉(zhuǎn)向二維搖桿。將搖桿推動至需要的位置后按下確定按鍵即可,無需實時控制。
(3)可變的回轉(zhuǎn)半徑。在操作手柄上設(shè)置了回轉(zhuǎn)半徑一維搖桿,以便用戶根據(jù)使用場合調(diào)整。
1.2 操作手柄信號處理算法
速度轉(zhuǎn)向二維搖桿輸出與位置成線性比例的二維電壓信號,作車速與轉(zhuǎn)角的指令集合,非常適合用來控制電動輪椅[3]。用戶前/后推動可以連續(xù)調(diào)節(jié)輪椅的車速,左/右推可以連續(xù)控制輪椅的轉(zhuǎn)角。通過操作手柄信號處理算法把一個二維信號轉(zhuǎn)換為速度和轉(zhuǎn)向控制指令。
速度轉(zhuǎn)向二維搖桿輸出的信號可由圖2來表示,X軸代表轉(zhuǎn)角,以向左轉(zhuǎn)為正;Y軸代表車速,以前進為正,最大行車速度設(shè)為5 m/s。速度轉(zhuǎn)向二維搖桿是兩路互相垂直的電位計,對X軸與Y軸方向電壓與轉(zhuǎn)角、轉(zhuǎn)速對應(yīng)關(guān)系的規(guī)定如圖2所示。二維電壓信號落入其中正方形區(qū)域,設(shè)某輸入指令對應(yīng)A(X,Y)點,通過如圖3所示的操作手柄信號處理算法,可得到左右電機的轉(zhuǎn)速轉(zhuǎn)向控制指令。
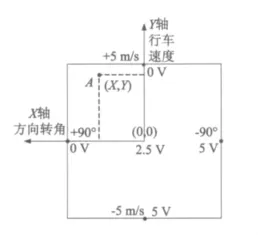
圖2 速度轉(zhuǎn)向二維信號模型

圖3 操作手柄信號處理算法框圖
算法處理過程如下:
(1)二維電壓坐標(X,Y)→二維速度轉(zhuǎn)向坐標(V,θ)。轉(zhuǎn)化結(jié)果可由以下公式給出:
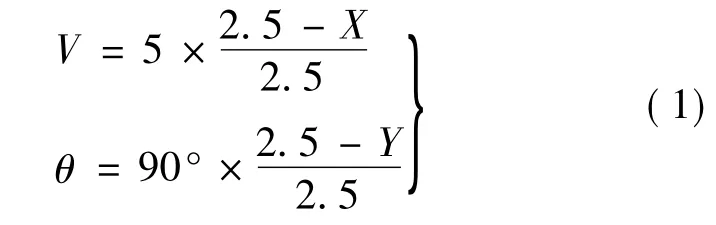
(2)左右電機運行指令的計算
電動輪椅的機械及運動模型如圖4所示。兩大輪為左右驅(qū)動輪,由一對外轉(zhuǎn)子無刷直流電動機直接驅(qū)動,前后各有一對小從動輪,在滾動的同時繞對應(yīng)轉(zhuǎn)軸轉(zhuǎn)動從而實現(xiàn)導(dǎo)向功能,而且后側(cè)的導(dǎo)向輪可以避免后傾,增加車體的穩(wěn)定性。圖中輪椅以O(shè)點為中心向左轉(zhuǎn)彎時的情景,V代表電動輪椅的質(zhì)心速度,ω代表質(zhì)心的角速度,Vl、Vr分別表示左右輪輪轂的線速度,ωl、ωr分別表示電動輪椅左右輪轉(zhuǎn)速,L為驅(qū)動輪間距,r表示驅(qū)動輪半徑,設(shè)由一維搖桿給出的回轉(zhuǎn)半徑為R(以向左轉(zhuǎn)彎為正),θ是電動輪椅的車體轉(zhuǎn)彎角度(以向左轉(zhuǎn)彎為正)。假定驅(qū)動輪椅相對地面只作純滾動,由電動輪椅運動學(xué)分析可知:

圖4 電動輪椅的運動原理示意圖

以上分析可知,通過操作手柄信號處理算法,可以得到左右電機轉(zhuǎn)速與轉(zhuǎn)向的控制信號。
2 雙電機差動驅(qū)動控制模式
操作手柄新模型的原理部分已證,無需電動輪椅的運動軌跡,通過左右兩輪的轉(zhuǎn)角差即可控制車體的轉(zhuǎn)向,這就為方向轉(zhuǎn)角閉環(huán)控制奠定了基礎(chǔ)。
2.1 無位置傳感器的電機轉(zhuǎn)角算法
為實現(xiàn)轉(zhuǎn)角的閉環(huán)控制,首先應(yīng)得到電機的轉(zhuǎn)角,傳統(tǒng)的電機位置控制系統(tǒng)大多采用光電碼盤等位置傳感器,成本高、機械機構(gòu)復(fù)雜[2]。本文充分利用無刷直流電動機的霍爾轉(zhuǎn)子位置傳感器,通過對霍爾脈沖計數(shù)以及對中斷間隔計時的方法[4],可得到較高精度的電機轉(zhuǎn)角。
將電機的三個霍爾信號送入單片機的電平變化通知引腳,則電機每旋轉(zhuǎn)60°的電角度單片機都會產(chǎn)生一個引腳中斷,在中斷程序中通過霍爾信號的代碼判斷電機的轉(zhuǎn)向并進行有方向的計數(shù),依據(jù)計數(shù)變量的數(shù)值與符號即可間接得到電機轉(zhuǎn)角。
然而,這種轉(zhuǎn)角算法存在60°電角度的誤差,本文提出了一種便捷的改進方法。在每個管腳中斷程序中加入了計時器操作,在任意時刻通過讀取定時器即可得到距上一中斷時刻的時間,依據(jù)當前轉(zhuǎn)速計算該時間段內(nèi)電機轉(zhuǎn)角,從而修正中斷計數(shù)法的轉(zhuǎn)角誤差。以左電機轉(zhuǎn)角的計算為例,具體計算過程如下:

式中:hcountL為左電機的位置標志變量;signL為左電機的轉(zhuǎn)向標志變量,其中1表示正轉(zhuǎn),-1表示反轉(zhuǎn);ωL為當前左電機的速度;T為左電機中斷間隔計時器的數(shù)值;θL為左電機的轉(zhuǎn)角;30°是2對極電機,則60°電角度相當于30°的機械轉(zhuǎn)角;FCY/256為定時器的時鐘頻率。
其算法流程框圖如圖5所示。
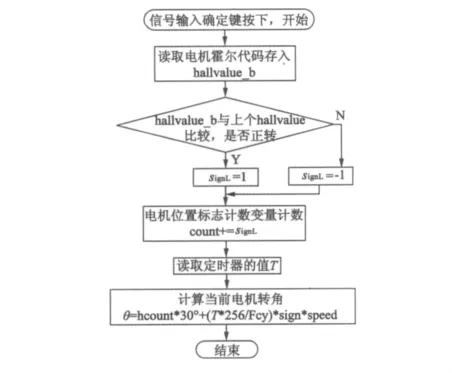
圖5 電機轉(zhuǎn)角算法的軟件流程圖
2.2 位置閉環(huán)控制
要實現(xiàn)電動輪椅的三種運動狀態(tài)(直線運動、轉(zhuǎn)彎以及原地回轉(zhuǎn)),控制器需具備以下的功能:直線行駛時主從電機轉(zhuǎn)速跟隨,轉(zhuǎn)彎時導(dǎo)向電機轉(zhuǎn)角位置閉環(huán)。
2.2.1 主從電機轉(zhuǎn)速跟隨算法
電動輪椅直線行駛時,要求左右驅(qū)動輪以相同速度轉(zhuǎn)動,但兩電機的輸入指令一樣,也不能保證兩驅(qū)動輪的速度相同;加之響應(yīng)時間的延遲、受力不均等原因,即使兩輪實時速度等同也無法保證其直線運行[2]。這就需要引進一個補償系統(tǒng),對兩輪轉(zhuǎn)過的角度累計比較,使輪椅在出現(xiàn)微小的偏移后,能夠自行調(diào)節(jié)方向,維持初始方向沿直線運動。
將左輪定義為主動輪,右輪為從動輪。將主從電機各自的轉(zhuǎn)子霍爾位置信號送入單片機,計算各輪當前轉(zhuǎn)向、轉(zhuǎn)速[5]、累積的轉(zhuǎn)角位移,并根據(jù)左右電機轉(zhuǎn)角位置差以及實時轉(zhuǎn)速差來計算得出從動電機的轉(zhuǎn)速控制信號,并保證左右兩車輪滾過相同的距離。從動電機轉(zhuǎn)速控制圖如圖6所示。

圖6 從動電機轉(zhuǎn)速控制圖
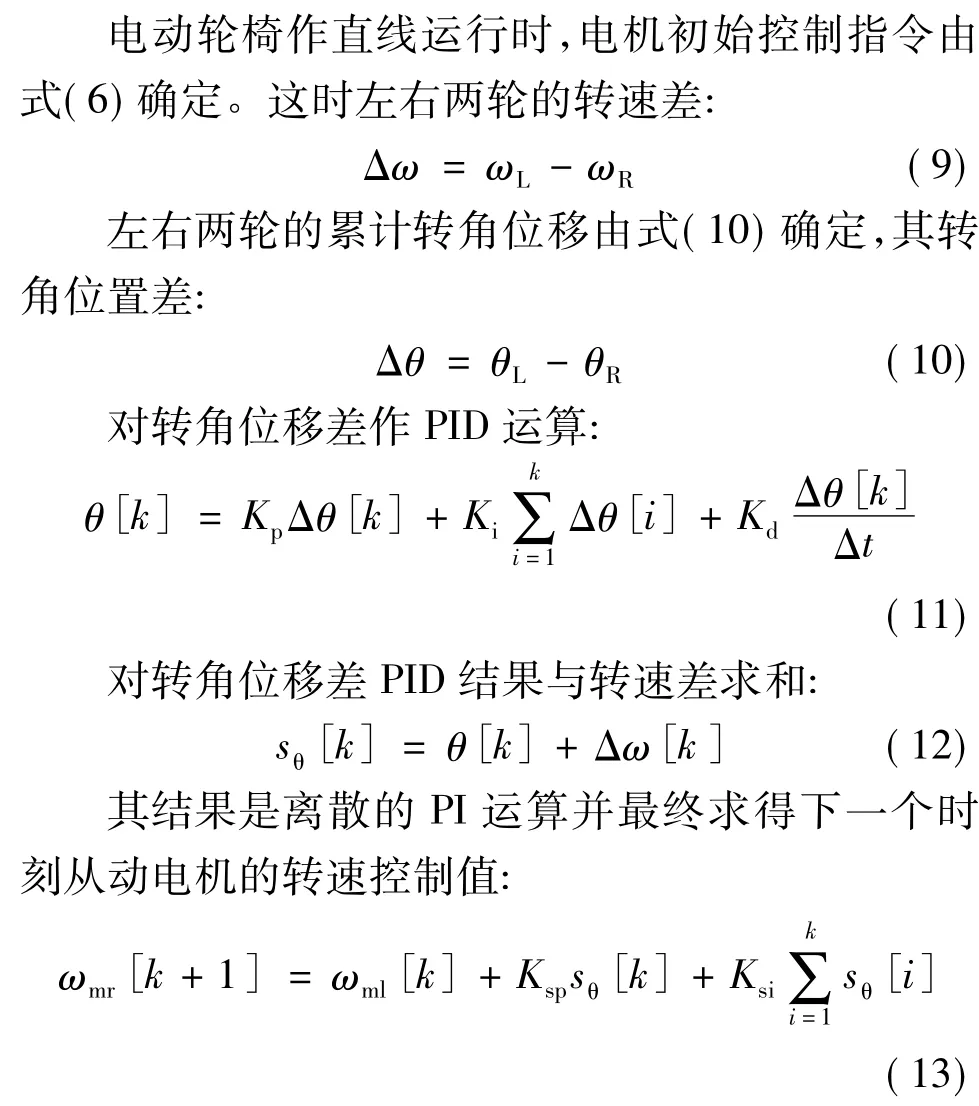
式中:ωL、ωR為左右電機轉(zhuǎn)速;ωml、ωmr為左右電機給定轉(zhuǎn)速;θL、θR為左右電機轉(zhuǎn)角位移;Δθ為左右電機轉(zhuǎn)速之差;Δt為單位時間差;sθ為轉(zhuǎn)角位移差與轉(zhuǎn)速差的運算量;Kp、Ki、Kd為PID運算中比例項、積分項、微分項系數(shù);Ksp、Ksi為 PI運算中比例項、積分項系數(shù)。
2.2.2 電動輪椅轉(zhuǎn)角閉環(huán)算法
電動輪椅轉(zhuǎn)彎或者原地回轉(zhuǎn),都可以歸納為不同回轉(zhuǎn)半徑下的轉(zhuǎn)彎運動。為了減少操作指令,需要對車體方向轉(zhuǎn)角(即左右電機的轉(zhuǎn)角差)進行閉環(huán)控制,使左右電機實現(xiàn)差速定向。
由于轉(zhuǎn)角位置閉環(huán)是以標記電機初始位置為基礎(chǔ)的,為方便輸入指令的及時更新,避免誤操作,速度轉(zhuǎn)向二維搖桿可自動復(fù)位,添加了確認鍵,確認信號送入優(yōu)先級較高的單片機外中斷管腳。當電動輪椅完成差速定向后,輪椅會以原速度做繼續(xù)直線運動,直至用戶更新操作手柄指令。轉(zhuǎn)角閉環(huán)算法寫在了管腳的中斷程序里,如圖7所示。

圖7 轉(zhuǎn)角閉環(huán)算法的軟件流程圖
3 運動控制系統(tǒng)新型控制策略的實現(xiàn)
依據(jù)上述的控制思想,本文所設(shè)計的運動控制器如圖8所示:樣機由操作手柄、主控單片機dsPIC30F、左右電機控制單元(MC33035與MC33039配合),無刷直流電動機驅(qū)動以及保護單元、顯示單元(LED)等模塊[6]構(gòu)成,兩對極的無刷直流行星齒輪電機36ZWN60-2420,其傳動比為3.82∶1。
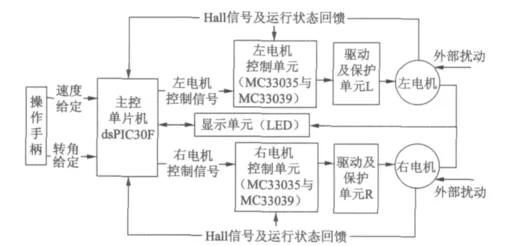
圖8 電動輪椅控制系統(tǒng)結(jié)構(gòu)框圖
4 控制策略的驗證
對電動輪椅的三種運動狀態(tài),即直線運動、轉(zhuǎn)彎、原地回轉(zhuǎn)進行實驗,通過兩電機運行狀態(tài)來驗證控制策略的有效性。
如圖9所示,控制單元中三相霍爾信號送入測速芯片MC33039,5腳是轉(zhuǎn)速輸出腳,通過其波形頻率可得電機轉(zhuǎn)速:
式中:n為轉(zhuǎn)速;f為5腳輸出PWM波頻率;p為電機極對數(shù),實驗樣機中為兩對極電機。
數(shù)碼管也可以在左右電機的實時轉(zhuǎn)速與輸入轉(zhuǎn)角及實際轉(zhuǎn)角之間切換顯示,這些硬件設(shè)計都為檢測在不同輸入信號下兩電機的運動狀態(tài)提供了方便。對于電動輪椅運動系統(tǒng),驅(qū)動輪半徑0.20 m,驅(qū)動輪輪距為0.60 m。
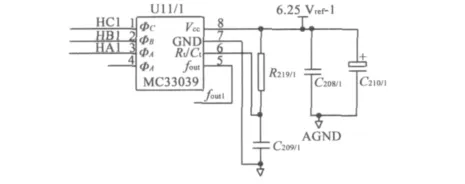
圖9 控制單元中測速部分電路圖
4.1 直線行駛主從電機轉(zhuǎn)速跟隨的驗證
直線行駛時,對操作手柄輸入指令θ=0°,V=5 m/s時,位置閉環(huán)控制策略要求此時左右輪電機做轉(zhuǎn)速跟隨運動。
根據(jù)式(6)理論值,左右車輪轉(zhuǎn)速為239 r/min,圖10表示直線行駛的驗證結(jié)果,圖10(a)表示左右兩路MC33039的5腳輸出波形的頻率為184.8 Hz,依據(jù)式(14)折合成左右電機轉(zhuǎn)速分別為906 r/min與924 r/min,與圖10(b)表示經(jīng)減速器后電機的輸出轉(zhuǎn)速分別為238.5 r/min與241.0 r/min,符合主從電機跟隨。
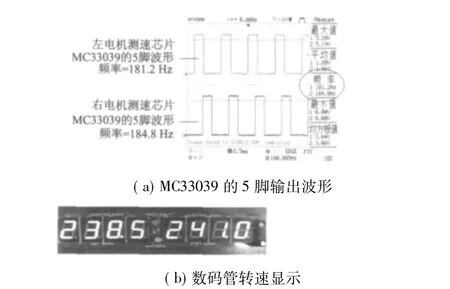
圖10 直線行駛時轉(zhuǎn)速跟隨驗證
4.2 轉(zhuǎn)彎運動時角度閉環(huán)的驗證
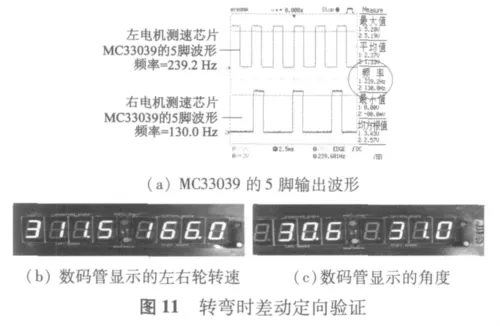
轉(zhuǎn)彎行駛時,位置閉環(huán)操作控制要求雙電機差速驅(qū)動。輸入信號給定為回轉(zhuǎn)半徑R=1 m,θ=30°,V=2.5 m/s。
根據(jù)式(3),計算左右車輪轉(zhuǎn)速理論值分別為310.4 r/min與167.1 r/min。實驗結(jié)果如下:圖 11(a)顯示左右兩路5腳輸出波形的頻率理論值為239.2 Hz、130.0 Hz依據(jù)式(14)折合左右電機轉(zhuǎn)速對應(yīng)為1 196 r/min與650 r/min;圖11(b)顯示經(jīng)減速器后電機的輸出轉(zhuǎn)速為311.5 r/min與166.8 r/min;由圖11(c)可知,數(shù)碼管顯示用戶輸入的方向轉(zhuǎn)角為 30.5°,實際轉(zhuǎn)角為 31.0°。
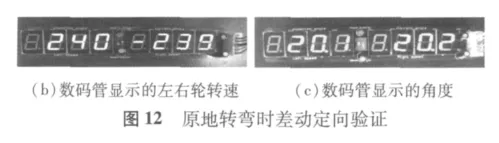
4.3 原地回轉(zhuǎn)運動時角度閉環(huán)的驗證
原地回轉(zhuǎn)運動即回轉(zhuǎn)半徑R=0時的轉(zhuǎn)彎運動,雙電機同樣差速定向驅(qū)動。輸入信號給定為θ=20°,V=0,車輪線速度設(shè)為 Vm=5 m/s。
根據(jù)式(7)以及式(14)理論值:兩路MC33039的5腳輸出頻率為182.4 Hz;左右輪以239 r/min的轉(zhuǎn)速分別正反轉(zhuǎn),實測數(shù)據(jù)如圖12所示。

5 結(jié) 語
本文以實現(xiàn)更為人性化、智能化的電動輪椅運動控制系統(tǒng)為研究目的,對以方向轉(zhuǎn)角閉環(huán)控制為核心的控制模式進行了詳細論述,并以此為依據(jù),制作了控制器樣機加以驗證。實驗結(jié)果證實,電動輪椅直線行駛、轉(zhuǎn)彎運動、原地回轉(zhuǎn)等運行狀況下,雙電機基本可以實現(xiàn)轉(zhuǎn)速跟隨、差速定向等功能,不考慮到搖桿的精度以及響應(yīng)延遲等誤差因素,從而驗證了該控制思想的有效性與合理性。
[1] Ding D,Cooper R A.Electric powered wheelchairs[J].IEEE Control System Magazine,2005(25):22-34.
[2] 王曉旭,楊振強,張濤.基于ATmega48的電動輪椅主從控制系統(tǒng)設(shè)計[J].電機技術(shù),2010(4):47-50.
[3] 馬小珍.電動輪椅控制系統(tǒng)設(shè)計[D].武漢:華中科技大學(xué),2006.
[4] 皇甫宜耿,馬瑞卿,楊永亮.具有自動定位的航空無刷直流直線作動系統(tǒng)[J].計算機測量與控制,2006,14(5):630-63.
[5] 畢海悅,張東來.一種無刷直流電動機的在線轉(zhuǎn)速估計方法[J].微特電機,2008,36(11):7-8.
[6] 周勇,李聲晉,田海波,等.四輪獨立驅(qū)動電動車的控制器設(shè)計[J].微特電機,2008,37(2):31-34.
猜你喜歡
計算機應(yīng)用(2022年2期)2022-03-01 12:33:42
計算機應(yīng)用(2022年1期)2022-02-26 06:57:42
計算機應(yīng)用(2021年4期)2021-04-20 14:06:36
計算機應(yīng)用(2021年3期)2021-03-18 13:44:48
能源工程(2020年6期)2021-01-26 00:55:22
計算機應(yīng)用(2021年1期)2021-01-21 03:22:38
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24