單軸穩定平臺控制系統及其電磁干擾防護
2012-02-22 08:22:18康永泰袁國珍
微特電機 2012年7期
關鍵詞:系統
康永泰,齊 蓉,袁國珍
(西北工業大學,陜西西安710129)
1 穩定平臺控制器的總體設計
1.1 設計背景及意義
穩定平臺技術在各國一直是經久不衰的研究課題,在軍事、民用工業上都有著廣泛的應用[1]。單軸穩定平臺控制器用于當載體在空間旋轉時穩定載體內的平臺負載,同時輸出載體相對平臺的角度及角速度信號。理想的單軸穩定平臺系統,其內部平臺是不會跟隨外部載體轉動而轉動的,然而實際中,由于支撐軸的摩擦力存在,當外部載體轉動時,支撐軸的摩擦力矩帶動平臺隨著載體同方向轉動。為了克服不均勻負載以及支撐軸承帶來的摩擦力矩,我們需要一個力矩電機來產生抵消臺體旋轉的力矩。本文采用空間矢量脈寬調制技術,驅動永磁同步電動機實現上述功能,并對平臺的硬件電磁隔離設計進行了詳盡的說明和驗證對比。
1.2 控制器的總體框架設計
伺服控制器的中心任務是控制伺服電機以一定的性能指標快速、精確的運動。因此,系統本質上就是一個高精度位置系統。伺服控制器的總體組成框圖如圖1所示,主要由伺服電動機、伺服控制器、磁電編碼器、IMU(或模擬IMU)等構成。
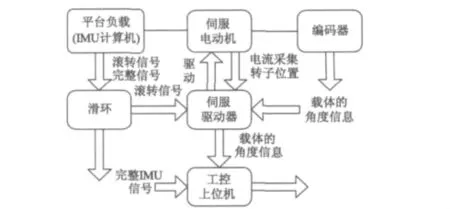
圖1 伺服控制系統組成框圖
2 穩定平臺的硬件設計
2.1 硬件設計的總體結構
伺服控制系統硬件電路主要由控制電路及功率驅動電路組成,外加其它輔助電路。控制電路主要包括DSP最小系統電路、位置檢測電路、通訊電路、隔離電路等,主要實現信息采集及SVPWM控制策略實現。功率電路由驅動電路、功率MOSFET、電流采樣及保護電路構成,完成電機驅動控制。伺服控制器的硬件結構框圖如圖2所示。
2.2 DSP最小電路系統設計
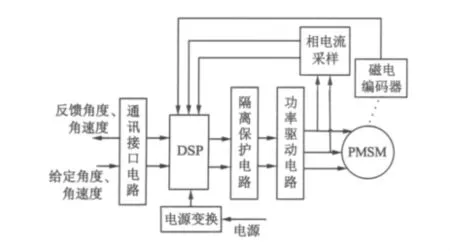
圖2 穩定平臺系統硬件結構框圖
系統構造了一個DSP最小電路系統,使控制回路能正常工作,如圖3所示。系統中選用電源芯片TPS70351作為DSP電源轉換芯片,它擁有上電時序功能,保證DSP TMS320F2812的I/O供電先于內核供電。為提高供電的質量,在芯片的電源輸入管腳附近都使用了0.1 μF 的電容進行濾波[2]。
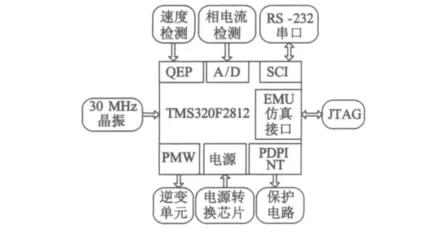
圖3 DSP最小系統框圖
2.3 電機驅動電路設計
本控制器采用事件管理器EVB產生六路SVPWM波經過隔離放大形成對電機的驅動信號,通過功率驅動芯片IR2103S放大驅動,由IRFR3412構成的逆變電路從而提供對電機的驅動信號。
2.4 相電流采樣電路
電機電流環的補償和矢量控制下電機的驅動需要對電機相電流采樣。由于本系統采用的永磁同步電動機是星形連接方式,故其A、B、C三相電流之和為零,因此只需采樣兩相電流。檢測相電流的任務由線性電流傳感器ACS712完成。ACS712的輸出端先經過一個減法器限壓,然后經過巴特沃斯低通二階濾波。另外,為了防止意外產生的過電流干擾,將濾波后的信號送入A/D采樣單元之前要經過已經設置好的保護電路。
2.5 電源變換電路
外部提供對地隔離的+27 V和+5 V電源。+27 V提供母線電壓,經電源變換后為驅動芯片IR2103和隔離芯片ADUM1401一側提供電源;+5 V經電源變換后為DSP I/O、DSP內核(數字)及電流采樣芯片ACS712等提供電源。
2.6 通訊接口電路
為平臺采用慣性測量單元(IMU)提供伺服控制系統的給定信號。由于可以用IMU直接對平臺的角加速度進行測量,從而對測得的角加速度進行一次積分可以得到平臺的角速度,再進行第二次積分就可以得到了平臺的角位置。平臺的伺服通訊信號經由串口RS422傳送。由芯片SN74CBTD3305C構成的電平轉換電路,將DSP輸出3.3 V轉換為5 V供給由MAX488EESA構成的專用通訊電路,完成整個通訊接口電路的功能。
3 穩定平臺控制器的軟件設計
在軟件方面平臺采用TI公司的集成編譯環境CCS3.3,使用混合語言(C語言+匯編語言)進行編程,并采用模塊化的設計思想。
系統總體結構如圖4所示。系統軟件主要由兩部分構成:主程序模塊和中斷服務處理程序模塊,每個程序模塊又包含若干子程序模塊。主程序模塊在完成系統的初始化(系統寄存器的設置和初始化變量)工作后進入循環等待中斷狀態;本系統的中斷服務處理程序是由SCI中斷和定時器3下溢中斷兩部分構成:其中設定定時器3下溢中斷作為系統的主中斷,依次完成對系統的電流環、速度環和位置環的三閉環控制;而SCI中斷僅用于進行和上位機進行通訊,傳遞平臺角度、角速度信息及控制指令。
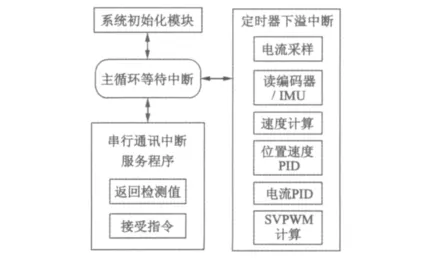
圖4 系統軟件總體結構
本系統采用了位置、速度和電流三閉環控制,為了防止控制時過飽和現象發生降低控制的實時性,本文采用了具有積分分離功能、抗積分飽功能的PID控制器或分段PID控制等改進型算法,使控制性能達到了良好的效果。
4 穩定平臺的抗干擾技術
4.1 電磁干擾產生途徑
在單軸穩定平臺控制系統中,各種電磁干擾(EMI)是相當多的,電磁干擾的產生需要具備三個條件:一是干擾源,二是干擾耦合途徑,三是干擾敏感設備[3]。上述三者構成了電磁干擾的三個基本要素。系統中電機、逆變器中的開關元件以及外部其它設備會產生各種干擾信號,并把干擾帶到系統中去,通常情況下這些干擾信號會通過傳導干擾和輻射干擾兩種常見的方式傳遞到控制電路中,使電路或程序受到干擾,產生紊亂。
4.2 抗干擾基本措施
在硬件設計中,本系統干擾的抑制主要考慮了加去耦電路、截斷干擾渠道、減小設備體積幾方面。
首先控制板上,采用Analog Devices公司的ADUM1401對六路SVPWM波進行隔離,其內部的噪聲抑制電路可提供高于25 kV/μs的共模抑制;為減小PCB板體積,采用四層板設計,并對電源地進行了分割以減少干擾;數字地與模擬地之間通過電感單點連接減少干擾。
其次,對于整個穩定平臺的供電,外部電源經若干隔離變壓器的隔離才分別供給平臺、IMU以及工控上位機,并且供給控制板的電源線均采用屏蔽線;工控上位機的電源線和信號線分路走線。
以上措施都是為了避免電磁干擾的影響而采取的抗電磁干擾措施。
4.3 編碼器干擾及解決方案
對于輻射干擾和電磁耦合性干擾,切斷其傳播途徑的最有效措施是屏蔽[4]。我們采用的是金屬殼屏蔽,但金屬屏蔽也有其缺點,當被屏蔽干擾信號的波長正好與金屬殼的某個尺寸接近的時候,金屬殼很容易會變成一個大諧振腔,即電磁波會在金屬殼內來回反射,并會產生互相迭加,如圖5所示。當電機尾部的磁電編碼器及控制板裝入試驗臺外部拖動電機的尾部的封閉的金屬艙體中時,磁電編碼器產生的電磁場產生的電磁波經金屬艙體反射震蕩對控制板上的采樣電流產生嚴重的干擾,導致控制效果很差,遠不能達到指標要求,為此設計了一種由純鐵作為屏蔽材料打造的能緊包編碼器的屏蔽外罩,很好地隔離干擾源,控制效果得到大大提高。
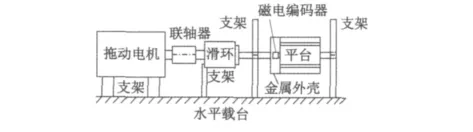
圖5 平臺的試驗臺
以下為幾組編碼器加屏蔽前后實際實驗過程中得到的平臺IMU傳回數據的對比,如圖6~圖9所示。
在有強烈的電磁干擾的情況下(磁電編碼器未加屏蔽罩),穩定平臺運行的結果如圖6及圖8所示。曲線1為既有高轉速又有低轉速且運行方式和實際情況最為接近的曲線,曲線2為載體勻速5 r/s時的運行曲線,與對應的圖7和圖9相比較可以發現,與在屏蔽了電磁干擾以后得到的結果,要遠好于未加屏蔽罩前的運行效果,可以發現磁電編碼器在入艙之后產生的電磁干擾的影響十分之大,使由IMU獲得的角度偏差和角速度偏差嚴重超出指標。針對平臺中可能出現的電磁干擾情況進行了有效的預防,同時通過對其中一種特殊情況下電磁干擾的分析解決,說明了電磁干擾的廣泛性和突發性,要仔細排查。
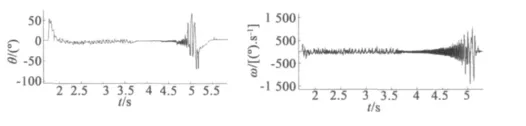
圖6 編碼器未屏蔽曲線1
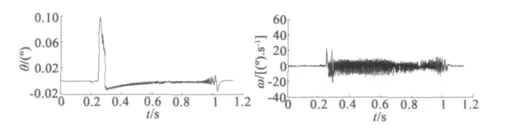
圖7 編碼器屏蔽曲線1
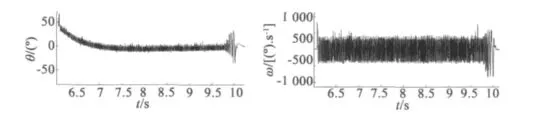
圖8 編碼器未屏蔽曲線2
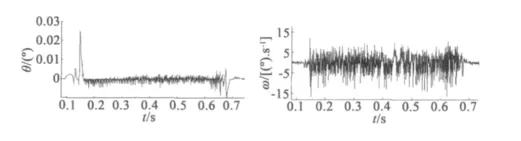
圖9 編碼器屏蔽曲線2
5 結 語
本文設計了單軸穩定平臺伺服控制系統,結合工程實踐與技術指標,其伺服系統硬件及軟件的性能優異,結構整齊劃一。針對系統中可能出現的電磁干擾需要全面地考慮防護,以防止造成嚴重的影響。
[1] 吳樹平.車載三軸穩定平臺控制系統的研制[D].南京理工大學,2007.
[2] 蘇奎峰,呂強.TMS320X281xDSP原理及C程序開發[M].北京:北京航空航天大學出版社,2008.
[3] 錢照明,陳恒林.電力電子裝置電磁兼容研究最新進展[J].電工技術學報,2007,22(7):1-11.
[4] 王宏,陳懷春.PWM控制系統中的電磁兼容設計[J].電子工程師,2004,30(11):7-9.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32