高超聲速飛行器再入多段導引方法研究
2012-03-03 06:18:02劉冠南周浩陳萬春
飛行力學 2012年4期
關鍵詞:方法
劉冠南,周浩,陳萬春
(北京航空航天大學宇航學院,北京 100191)
引言
通用航空飛行器(Common Aero Vehicles,CAV)再入受到嚴格的過程和終端狀態約束,設計一條使得飛行器滿足各種過程和目標要求的彈道對制導方法有很高的要求[1-3]。文獻[4]提出了一種滿足過程約束和終端條件的縱向參考軌跡的在線生成方法;文獻[5]基于此引入了過渡段對可重復使用運載器X33進行再入仿真;文獻[6]采用速度方向與視線方向偏差角走廊進行了橫程控制。本文在這些基礎上提出多段彈道的導引律,將再入軌跡分為初始下降段、過渡段和占大部分飛行時間的擬平衡滑翔段,在初始下降段和過渡段,利用擬平衡滑翔條件(Quasi-Equilibrium Glide Condition,QEGC)把約束轉換為傾側角的上界,通過限制傾側角的大小來滿足約束,在地面生成參考彈道;擬平衡滑翔段采用縱向和橫向分開制導的預測校正方法,縱向制導算法用于決定傾側角的大小,橫向制導決定傾側角的方向,在機載計算機上實時預報實際落點和目標落點的偏差,計算控制信號,調節傾側角的大小和方法,消除偏差。
1 CAV再入動力學建模
以CAV-H[7]為對象,考慮地球自轉,建立飛行器三自由度質心運動模型。
1.1 三自由度質心運動方程
無量綱化的三自由度質心運動方程如下:


式中,m為飛行器質量;ρ為大氣密度,通過Matlab函數atmoscoesa得到;Sref為參考面積;H為飛行器高度;R0為地球半徑;阻力系數CD和升力系數CL的表達式[7]如下:

從防熱的角度考慮,迎角α由其隨Ma的變化規律得出[6],那么方程中唯一的控制變量是傾側角σ。
1.2 過程約束和終端約束
不同的再入階段軌道約束不同,因為初始速度很大,初始下降段約束主要是熱流密度。在再入中段,為保證飛行器的機動能力,過載成為了主要約束。在再入末段速度相對較小,此時為保證飛行器的可操作性,動壓成為主要約束。此外,為了防止彈道大幅度振蕩,需要考慮到平衡滑翔(EG)約束。將上述約束依次表達如下,這幾種約束也可以轉換到速度-高度坐標系形成一條再入走廊,如圖1所示。

式中,kQ=1.0387×10-8;σEQ為平衡滑翔傾側角。為了順利轉換到末端能量管理段并達到指定目標,需滿足再入段末端約束:rf=rTE,Vf=VTE,Sf=STE,其中下標f表示最終狀態,S表示飛行器當前位置到目標點的大圓弧距離。
為了保證飛行器的穩定性,要求傾側角上、下限分別為 σul=80°,σll= -80°。

圖1 CAV再入走廊
2 再入多段導引算法
本文采用縱向與橫向分開制導的預測校正方法,縱向制導算法用于決定傾側角的大小,橫向制導確定傾側角的方向[1]。每過一定時間以飛行器當前飛行狀態作為初始值,生成一條參考彈道。然后控制導彈跟蹤該參考彈道并通過傾側角符號反轉控制橫向運動。
2.1 將軌道約束轉換成傾側角約束
2.1.1初始下降段最大允許傾側角
為保證該段彈道不會超出熱流密度約束,需要找到初始下降段常值傾側角上限σinm。
代入一個常值傾側角,積分式(1)~式(6)直到滿足:
式中,δ為一個小量常數;下標QE表示平衡滑翔。式(17)表示當前點的斜率,通過式(1)與式(4)相除并略去地球自轉影響得到。傾側角為零時QEGC表達式為:

將上式中r看作V的函數,并取r相對V的導數,可得式(16)中的(dr/dV)QE:

式中,K=R0SrefCL/(2m);~r為對一個給定V值,求解式(18)得到的r值。由文獻[5]可知,隨著初始下降段常值傾側角的增加,對應的熱流密度峰值變大。取初始下降段常值傾側角σinm為下式取最大值時的傾側角值:

將滿足式(16)和式(20)的彈道點稱為轉換點PT,該點速度稱為VPT。
2.1.2過渡段的傾側角范圍
初始下降段結束后,采用常值傾側角將導致彈道較大的振蕩,因此采用約束上限σQEm(V)作為該段傾側角,詳見下節中的式(22),該段末速度沒有嚴格的要求,0.8能很好地滿足要求。
2.1.3準平衡滑翔狀態下的傾側角范圍

軌跡約束式(12)~式(14)組成了再入走廊的下邊界,再入彈道必須位于這條下邊界之上,如圖1所示。為此,將式(12)~式(14)看成空氣密度關于速度的函數,對一個給定速度值,求得最大密度ρmax(V)就是這一速度下滿足軌跡約束的空氣密度上限,以此最大密度求得最大升力值Lmax(V),由式(21)得到:

QEGC提供了求解滿足所有約束的傾側角范圍的方法。如圖2所示,對平衡滑翔段彈道的任意速度值,傾側角范圍為:
傾側角控制律為:
BANK-SIGN(σ)詳見后面的橫向制導。
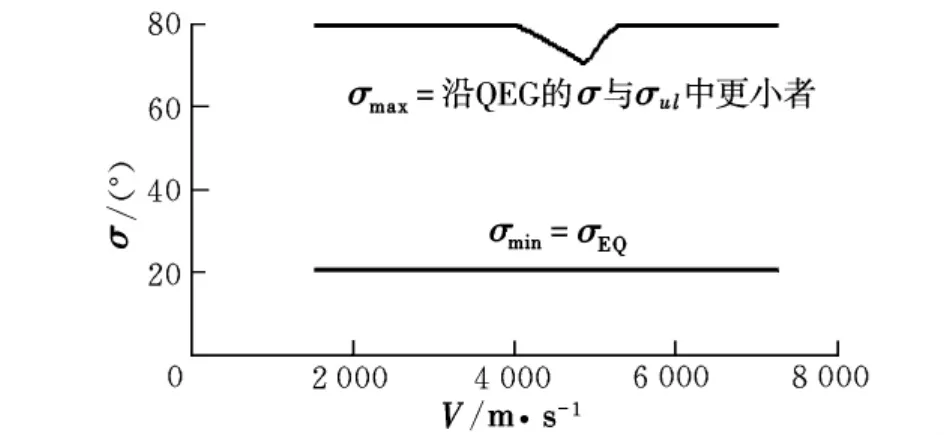
圖2 平衡滑翔段彈道的傾側角范圍
2.2 縱向制導
傾側角制導律迭代公式如下:
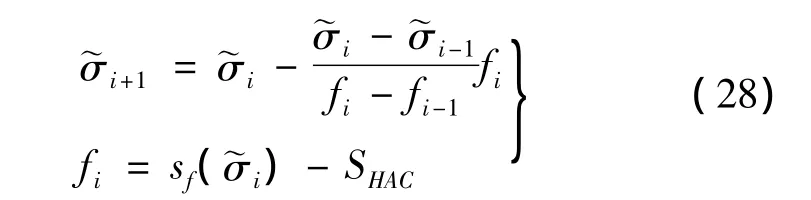
式中,fi為目標落點和預測落點之間的大圓弧度,即預測落點誤差。首先給定初始傾側角,積分運動方程,預測飛行器達到末端速度VTE時的fi值。將此fi值與要求值進行比較,若偏差滿足精度要求,則迭代終止,若不滿足,通過式(28)計算新的σ,繼續上述過程。
2.3 橫向制導
將速度方向和到目標的視線角的偏差記做ψΔ,傾側角的符號應使得ψΔ逐步減小以滿足末端要求。
傾側角的方向是通過橫向制導控制來實現的,首先建立橫向制導的方向誤差走廊[6](見圖3)。當ψΔ超過方向誤差邊界,σ反向。若Δψ超出了該走廊,傾側角方向由下式決定:
BANK-SIGN(σ)=-BANK-SIGN(σ)(29)
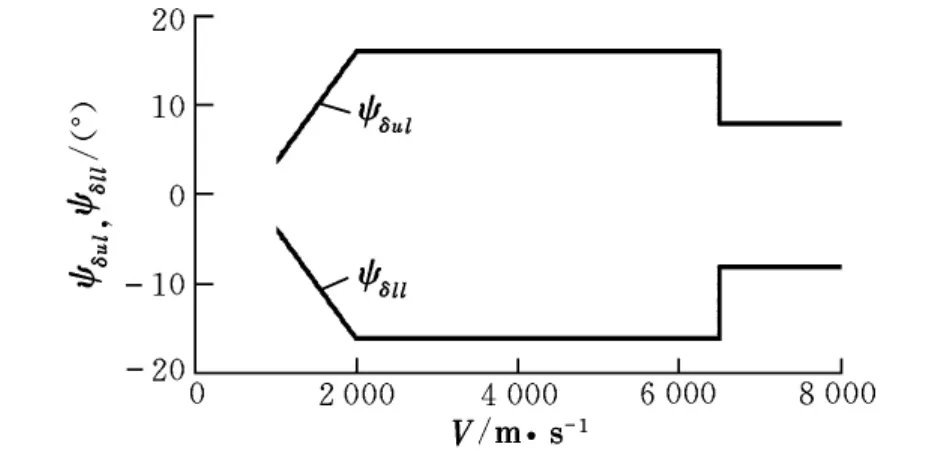
圖3 方向誤差走廊
3 數學仿真
以CAV-L飛行器作為數學仿真模型,對本文的方法進行數學仿真驗證,飛行器質量m=816.48 kg,Sref=0.325 8 m2,每50 s更新一次參考彈道。實際彈道偏差為三種均值為零的Gaussian分布(見表1[1]),彈道初始再入狀態和彈道約束如表 2、表 3所示。

表1 實際彈道偏差

表2 初始再入狀態
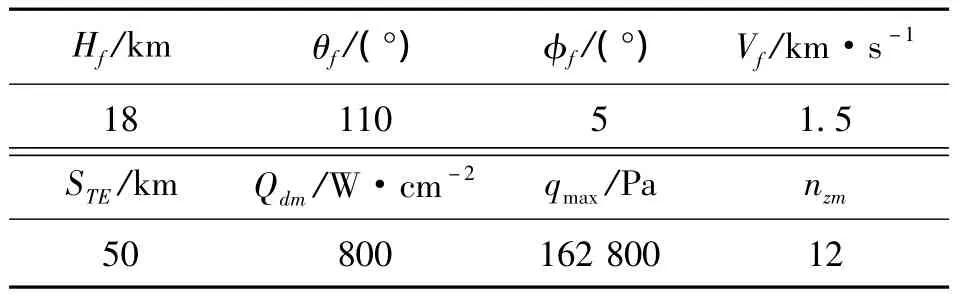
表3 彈道約束
仿真得到Vf=1.5 km/s,Sf=23.5 km,滿足末端精度要求。平衡滑翔段的彈道仿真結果見圖4~圖10。
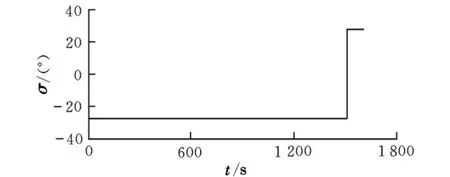
圖4 時間-傾側角
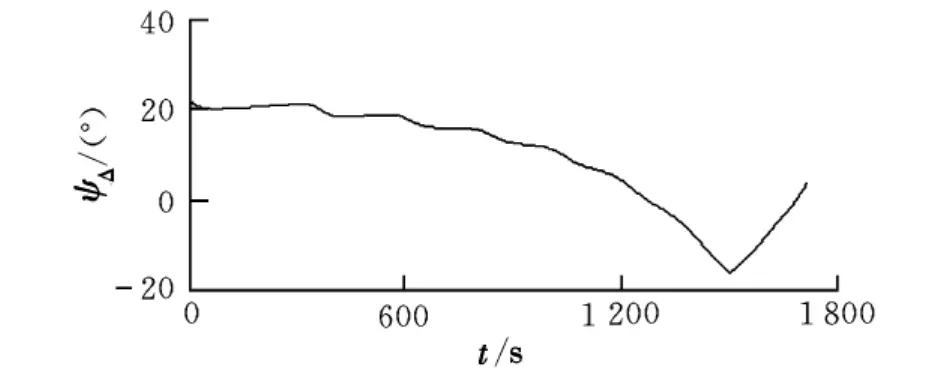
圖5 時間-方向偏差角
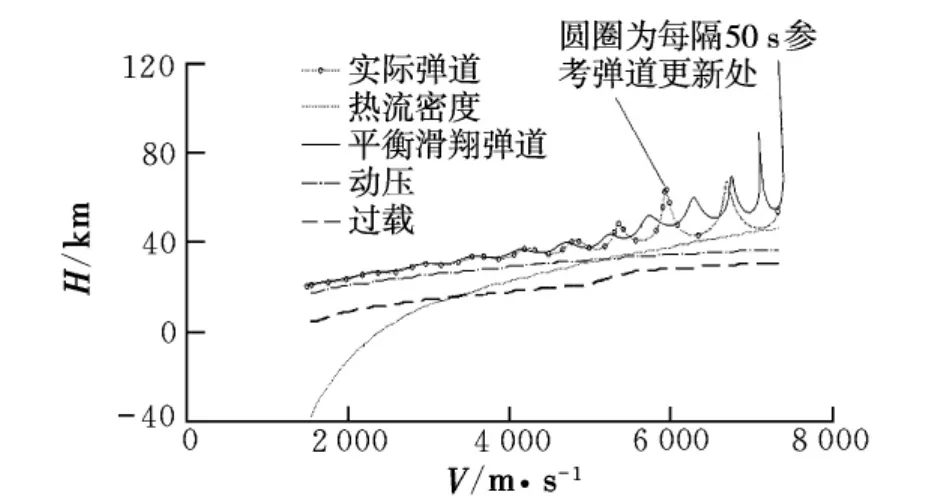
圖6 速度-再入彈道
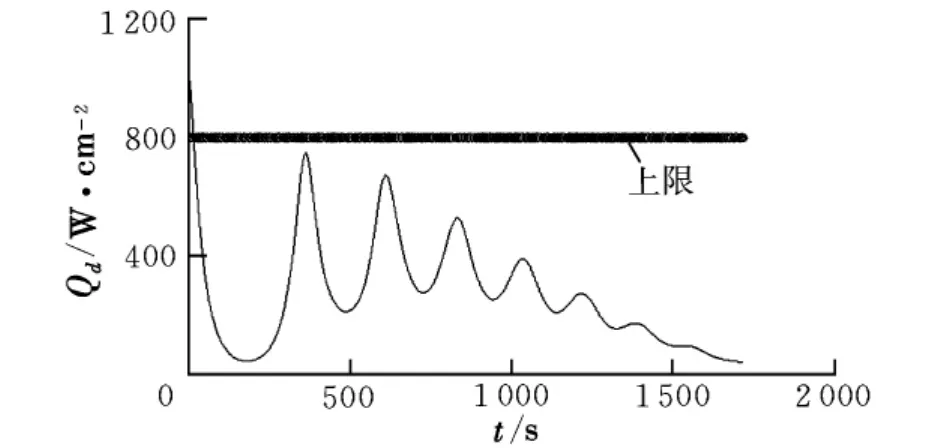
圖7 時間-熱流密度及其上限
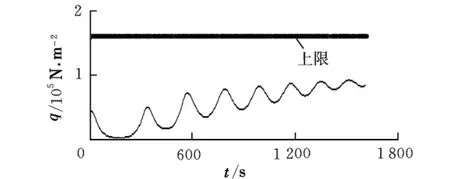
圖8 時間-動壓及其上限
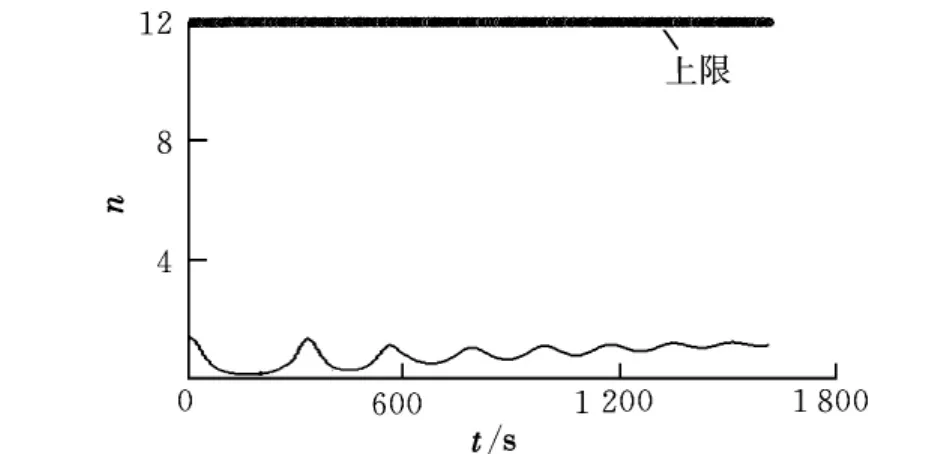
圖9 時間-過載及其上限
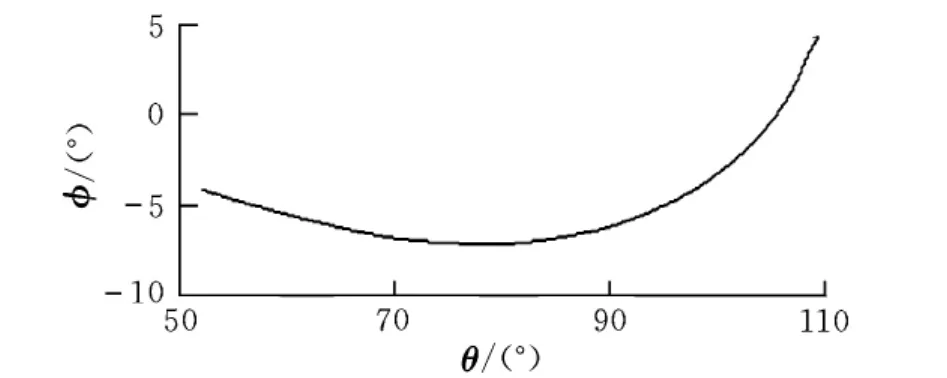
圖10 彈道經緯度曲線
由圖4~圖10可知,整條彈道沒有大的振蕩。傾側角只需一次翻轉,就可以實現對視線角偏差ψΔ的控制要求,在傾側角翻轉的同時,速度的視線偏差角的大小變化反向。彈道滿足各種飛行過程約束的制導律,平衡滑翔段的彈道十分平穩,實際動壓和過載離其對應的上限值有很大距離,彈道的經緯度曲線也比較平滑,本文采用的多段導引方法很好地滿足了控制要求。
4 結束語
本文將再入軌跡分為初始下降段、過渡段和擬平衡滑翔段并分別設計制導律,快速地得到了滿足過程約束和目標要求的彈道。過渡段的引入很好地解決了飛行器從初始再入段結束至平衡滑翔段開始之前的彈道上下劇烈振蕩問題。利用擬平衡滑翔條件將再入過程約束轉換成對側傾角上限的約束,很好地滿足了彈道的過程約束條件,并且不會帶來大的計算量,不致影響參考彈道的在線實時生成。同時,在彈道實際飛行有一定偏差的情況下,縱向和橫向分開制導的預測校正方法很好地控制飛行器到達目標落點。相對傳統的軌跡設計與跟蹤的再入制導方法,該方法既很好滿足了各種約束,具備計算快速性,又能有效應對不確定因素的干擾,有進一步研究的潛力。
[1] 沈作軍.航天器先進再入制導技術研究綜述[C]//中國宇航學會首屆學術會議論文集.北京:宇航出版社,2005:103-104.
[2] 趙漢元.飛行器再入動力學和制導[M].長沙:國防科學技術大學出版社,1997:382-412.
[3] 趙漢元.航天器再入制導方法綜述[J].航天控制,1994,22(1):26-33.
[4] Shen Z J.On-board three-dimensional constrained entry flight trajectory generation[D].Iowa State of America:Iowa State University,2002.
[5] Xue S B.Constrained predictor-corrector entry guidance[R].AIAA-2009-5867,2009.
[6] Zhou W Y,Chen H B,Yang D.Entry guidance for common aero vehicle[C]//The 2nd International Symposium on Systems and Control in Aerospace and Astronautics.Shenzhen,2008:1-6.
[7] Duan G R,Sun Y,Zhang M R.Aerodynamic coefficients models of hypersonic vehicle based on aero database[C]//2010 First International Conference on Pervasive Computing,Signal Processing and Applications.Harbin,2010:1001-1004.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56