基于內模原理的變質心彈頭控制
2012-03-03 06:18:14李文皓張珩
飛行力學 2012年4期
李文皓,張珩
(中國科學院力學研究所,北京 100190)
引言
變質心方法通過主動調整質心與氣動壓心的相對位移,產生氣動力矩并用于對飛行姿態的改變,可有效地規避氣動外形和氣動熱問題,且在機動飛行控制能耗方面具有突出優勢[1]。近年來,研究者對導彈或彈頭的變質心控制方法日趨重視,在變質心方法的動力學、控制律和彈體控制機構設計方面均取得了明確進展[2-4]。
變質心控制方法的主要難點在于:首先,滑塊相對運動過程引起了飛行器本體動力學對象的動態變化;其次,姿態動力學的耦合特性增強了運動滑塊在各通道間的耦合度;最后,滑塊的啟動和停止的慣性力矩對彈體系統姿態有明顯的抖動影響。
通過對變質心控制動力學的深入研究,對其中的非線性耦合及時變問題提出了包括自適應、動態逆、智能控制等方法,但滑塊的慣性力矩問題缺乏有效解決。一般認為,變質心控制穩定的一個基本條件是滑塊加/減速時的慣性力矩必須小于氣動力矩[5],因此變質心控制的使用范圍一般限制在70 km高度及以下區域的高速飛行體,且滑塊質量和加速度受此條件的限制[5]。雖然利用達朗伯原理將滑塊布置在彈體的主慣量軸[6]上可大幅削弱反作用力矩,但對姿態可控性范圍和工程實現提出了不小挑戰。
再入機動彈頭一般在高度40 km以下進行變質心調整,可獲得較大的機動過載。由于從40 km高度到落地的機動時間短,加之低空的稠密大氣對彈頭飛行的減速作用和積分效應,對軌跡的改變比較有限。若在高空就進行調整,由于速度高,時間長,對于再入傾角較小的情況,對飛行軌跡和落點的調整作用比較明顯。顯然,在高空進行變質心調整,弱氣動環境下的控制穩定性問題更為突出。
本文主要針對慣性力矩大于甚至遠大于氣動力矩條件下的變質心彈頭的穩定控制問題展開研究,著重討論變質心控制能達的配平攻角范圍,弱氣動力環境下的穩定控制方法,以及氣動力矩與慣性力矩比值大幅變化時的自適應策略。
1 變質心彈頭動力學
1.1 變質心彈頭姿態動力學
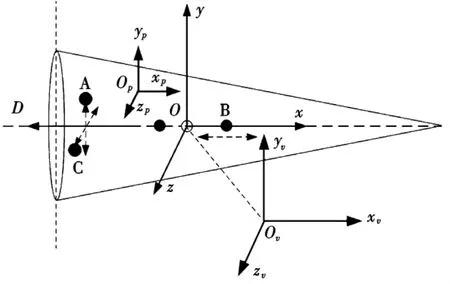
圖1 帶有3個滑塊的質量力矩彈頭布局示意圖
假設滑塊與彈體均為剛體,且相互運動僅為平動,控制滑塊的布置如圖1所示。軸向滑塊B安裝于彈體縱軸上,兩個徑向滑塊分別安裝于靠尾部的法向(滑塊A)平面和側向(滑塊C)平面內。根據多剛體動力學,在彈體坐標系Oxyz、速度坐標系Ov xv yv zv和導軌坐標系Op xp yp zp下建立姿態動力學模型。設彈體總質量為mS,A,B,C滑塊的質量分別為mA,mB,mC,裝配中點與原質心距離分別為LA,LB,LC,各滑塊在導軌坐標系Op xp yp zp下相對裝配中心點的移動距離分別為 δA,δB,δC。
姿態動力學方程為:

式中,H為彈頭對質心的動量矩;Σ M為作用在彈頭上的外力對質心的力矩總矢量,即為空氣動力矩與滑塊運動引起的慣性力矩之和,Σ M=MF-aero+MF。
將式(1)展開為標量形式則有:
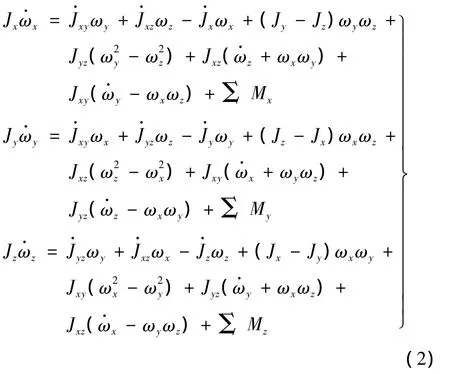
式中,Jx,Jy,Jz為彈頭對機體坐標系Oxyz各軸的轉動慣量;Jxy,Jyz,Jxz為相應的交差慣性積;ωx,ωy,ωz分別為飛行器相對于地面坐標系的旋轉角速度在機體坐標軸上的投影。
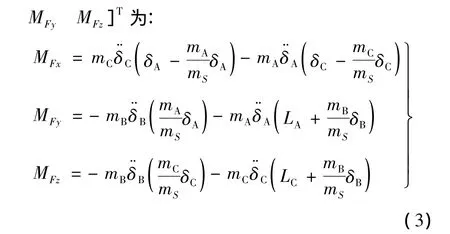
慣性力矩MF包括相對慣性力矩MFr,哥氏力矩MFg和陀螺力矩MFt。文獻[7]的數值仿真表明,對于三軸受控的飛行器,MFg和MFt的影響可基本忽略,高空段MFr過大會導致控制失穩。因此,本文主要針對MFr設計控制器,相對慣性力矩MFr=[MFx
考察總力矩矢量 Σ M=MF-aero+MF,其中MFr為瞬時力矩,僅在滑塊加減速運動時存在,為干擾力矩;MF-aero為持續力矩,只要質心偏移即存在,為控制力矩。當MFr?MF-aero時,控制力矩遠小于干擾力矩,使得反饋信息中主要反饋的是由于干擾力矩MFr所產生的姿態角變化,導致反饋失效,引起彈體姿控的不穩定。
1.2 變質心配平攻角能控范圍分析
以靜穩定彈頭為分析對象,考察縱向通道,假設滾轉角φ和側滑角均為零,在存在攻角α時,變質心彈頭的氣動力矩示意如圖2所示。
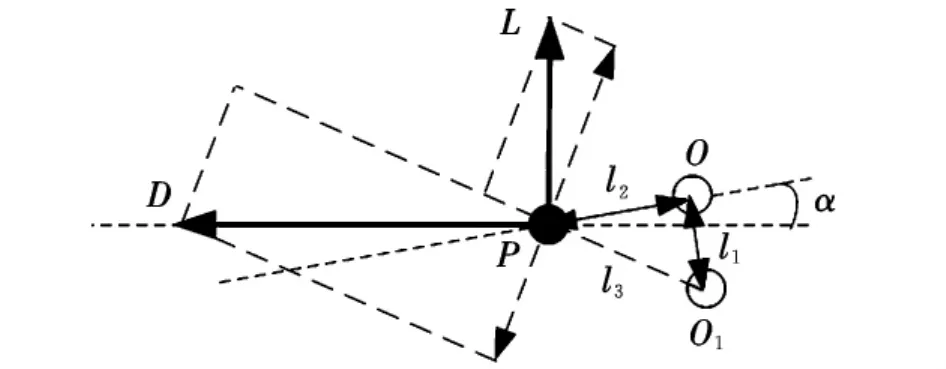
圖2 變質心彈頭飛行所受氣動力矩示意圖
氣動力矩表達式為:
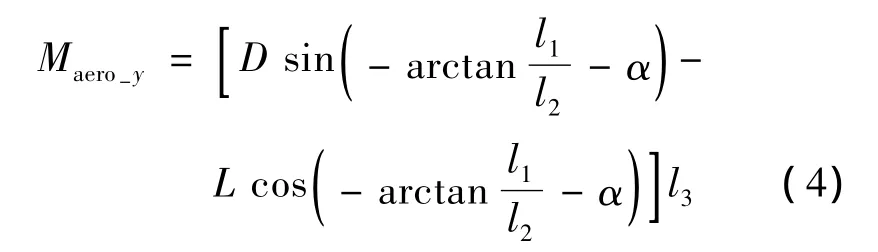
式中,L,D為氣動升力和阻力,與飛行攻角α、側滑角β和馬赫數Ma相關;l1為徑向質心偏移量;l2為新質心在機體幾何體軸上的投影位置到壓心的距離,得到:
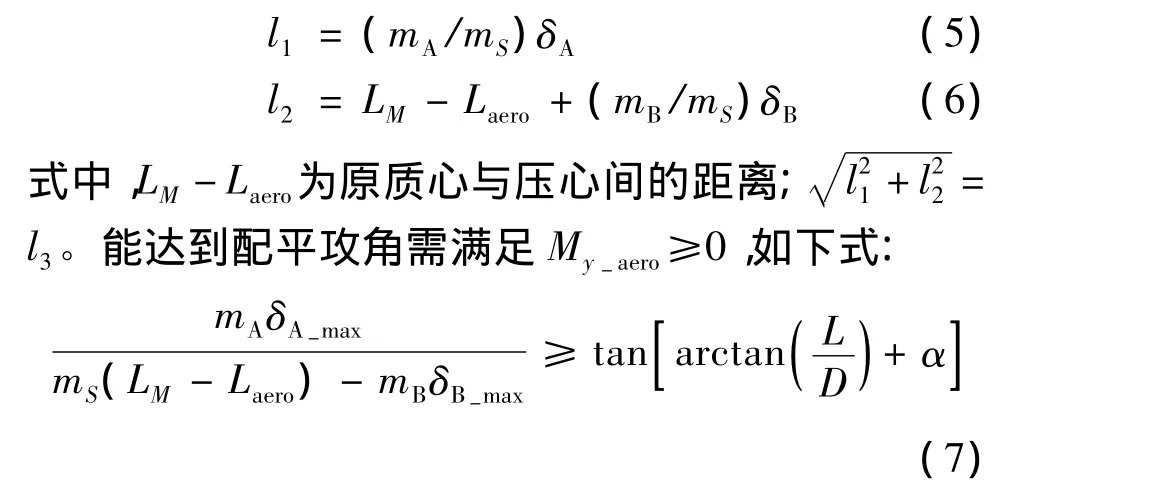
式中,α 為需求的配平攻角;δA-max,δB-max分別為徑向和軸向上滑塊可滑動距離。為保證靜穩定裕度,一般會設計l2≥llimit。由式(7)可知,當所需的配平攻角越大,對mA和δA-max的需求越高。設徑向滑塊從零位滑動到δA-max的時間為TA,在不滑動軸向滑塊B的條件下,氣動力矩與滑塊慣性力矩的最大比值為:

顯然,減小滑動調節時間TA,或者增大mA和δA-max會明顯增強滑塊滑動時的慣性力矩。
2 弱氣動環境下變質心姿態穩定控制方法
2.1 弱氣動環境下的變質心控制結構
內模原理在20世紀60年代就已經提出來并得到應用,其基本思想是當反饋回路包含外部干擾的動力學模型時,可良好地抵御外部干擾影響,提高反饋精度。前面分析了當MFr?MF-aero時,姿態控制不穩定的原因是姿態角/角速度反饋中的慣性力矩的影響遠高于氣動力矩的影響。可以設想,如果能從反饋量中剔除慣性力矩的影響信息,從而達成去慣性力矩化的局部姿態角/角速度反饋條件,則彈體姿態控制的穩定性可以保證。
設計帶內模的控制結構如圖3所示,分別由P控制器、D角速度反饋、姿態動力學/運動學逆解耦、滑塊狀態觀測器和滑塊指令解算模塊構成,所需的觀測量包括3個姿態角、3個姿態角速度、滑塊瞬時位置和滑塊瞬時加速度。
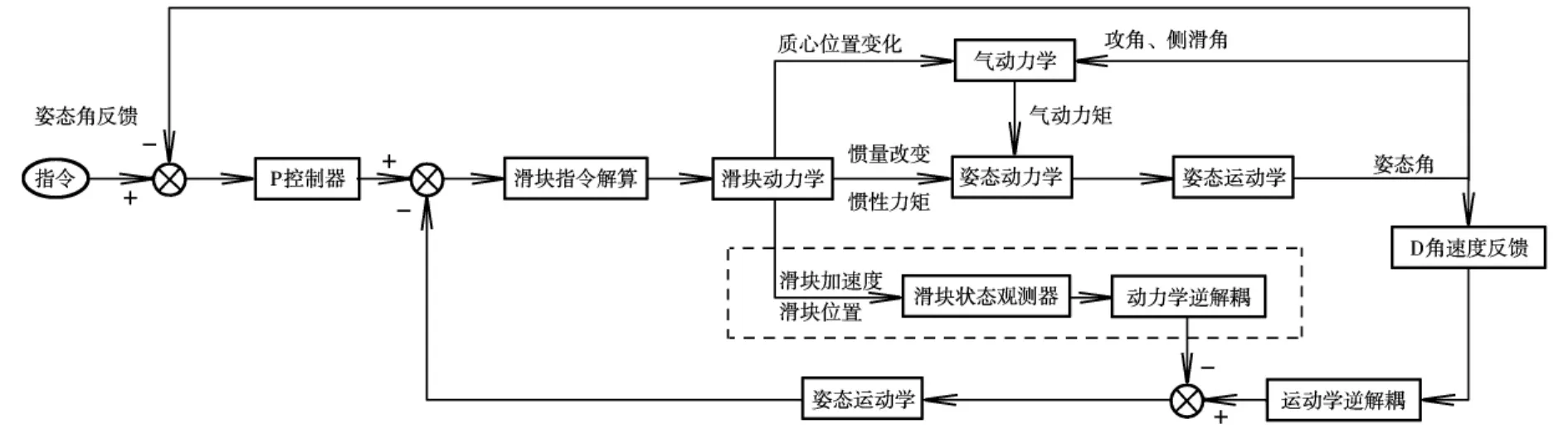
圖3 弱氣動力條件下的變質心彈頭控制結構示意圖
2.2 弱氣動環境下的變質心控制律
控制器的主結構為PD控制器:
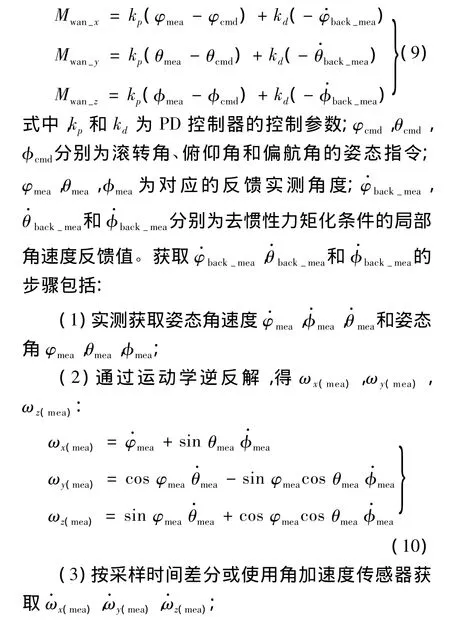
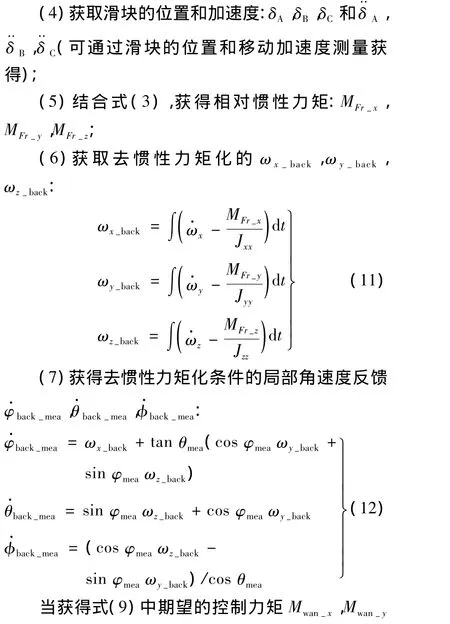
和Mwan-z后,可對解算滑塊的控制指令 δA-cmd,δB-cmd和δC-cmd(假設在能控范圍內)(由于滾動通道無氣動力矩,Mwan-x需使用其他機構實現)。
(1)根據配平攻角能達條件式(7),確定軸向滑塊的位置:
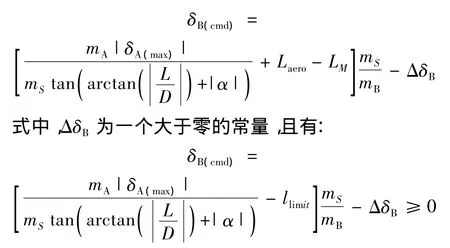
(2)確定軸向滑塊位置后,以式(7)取等式可獲得 δA-cmd;
(3)同理可獲得 δC-cmd。
3 仿真算例
假設某彈頭的參數如下:彈體總質量mS為400 kg;彈頭底部直徑為0.65 m;徑向控制滑塊質量mA為10 kg;A滑塊到質心距離LA為0.62m;可滑動距離δA=±0.3 m;軸向控制滑塊質量mB為150 kg(戰斗部滑動);B滑塊到質心距離LB為-0.1m;可滑動距離δB=±0.1 m;壓心到質心的距離為0.05 m;彈體的三軸轉動慣量分別為Jx=6 kg·m2,Jy=Jz=110 kg·m2;Jxy,Jyz,Jxz均為零,彈頭對應 3°攻角的升阻比為0.17。考慮由伺服機構和滑塊構成的變質心閉環系統為良好受控的系統,閉環系統的外部傳遞函數體現為一階系統:

仿真算例中,TA=0.1;TB=1;大氣密度模型采用美國1976大氣模型;彈頭飛行速度取7.3 km/s;高空段阻力系數為2。仿真結果如圖4~圖6和表1所示。
圖4為當指令攻角為3°,分別在高度為110 km,100 km,90 km,80 km和70 km下的攻角控制效果。由圖可知,控制穩定性得到了保證,隨著高度的降低,上升時間和調整時間縮短,超調量減小。
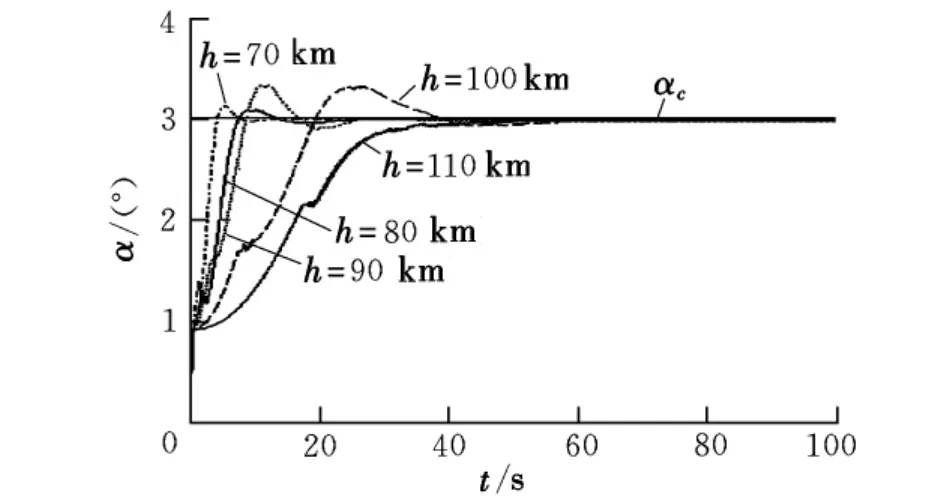
圖4 變質心彈頭攻角控制效果
圖5為當指令攻角為3°,分別在高度為110 km,100 km,90 km,80 km和70 km下攻角控制對應的滑塊運動情況。可以看出,高度下降越低,滑塊調整至平衡狀態所需的時間越短,當氣動力遠遠小于反作用慣性力時,滑塊的滑動有微幅快速振蕩的趨勢。
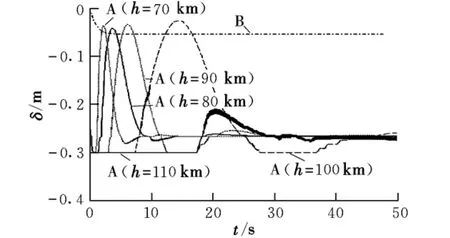
圖5 變質心彈頭姿態控制的滑塊情況
圖6為在不同高度下進行變質心控制時的相對慣性力矩與氣動力矩的大小比值的變化情況。可以看出,在未達到期望攻角前,由于滑塊滑動,其相對慣性力矩遠高于氣動力矩,有數量級上的差別,說明本文的方法有效地克服了相對慣性力矩強于氣動力矩時的控制穩定性問題。
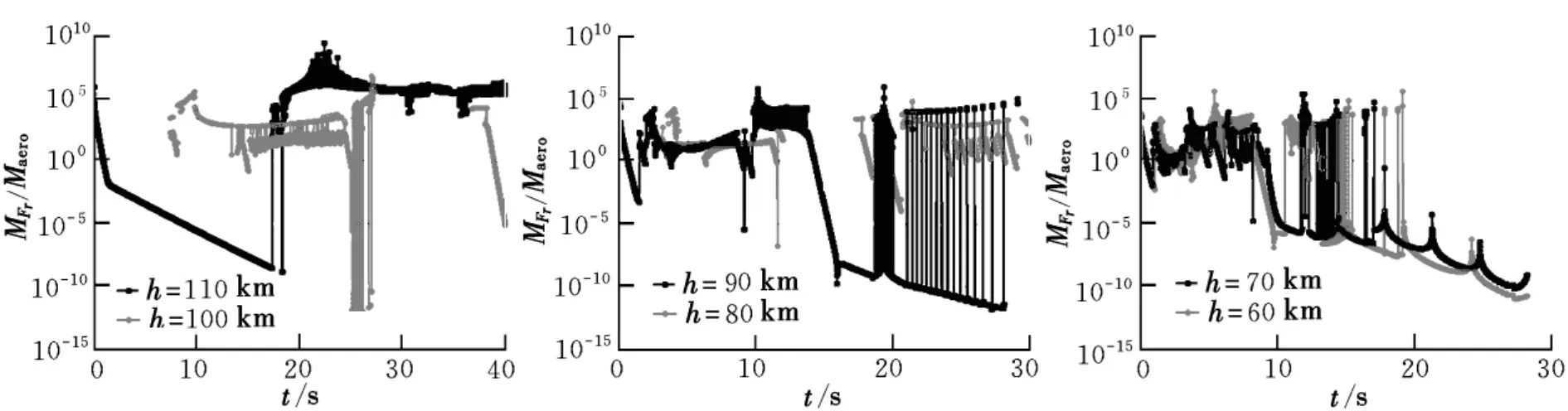
圖6 相對慣性力矩與氣動力矩的比值變化
表1為不同高度下的變質心姿態控制效果數據表,其中以30 s內時間平均下的慣性力矩與氣動力矩的比值作為效果說明。
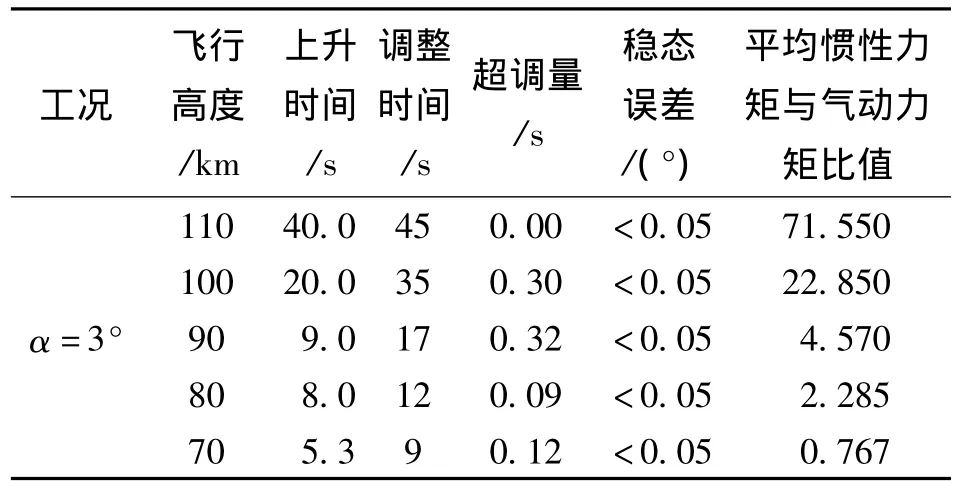
表1 變質心彈頭姿態控制效果
從圖4~圖6和表1可以看出,本文所提出的方法可有效地克服反作用慣性力矩的影響,仿真結果證實了該方法在慣性力矩高于氣動力矩1~50倍的條件下仍可保持控制的穩定性。
4 結論
本文重點針對弱氣動環境下的彈頭變質心穩定控制方法展開了研究,得出了以下結論:
(1)當要求變質心控制可產生可觀的配平攻角時,需要配置較大質量的徑向滑塊并限制靜穩定彈體壓心到質心距離。
(2)利用滑塊狀態觀測器達成去慣性力矩化的局部角速度反饋是可行的,仿真結果證實了該方法在慣性力矩高于氣動力矩數十倍時的控制穩定性。
(3)本文方法所述的弱氣動力條件屬于相對條件,而并非僅可使用于高空飛行器的變質心控制。采用本文的控制方法,可配置更重的滑塊和更高的滑動加速度,這對于提高變質心控制的動態性和增大可配平攻角范圍有一定益處。
滑塊狀態可測條件在工程上是易實現的,需要注意的是,文中假設對滑塊狀態的測量沒有誤差,當相對慣性力矩高于氣動力矩數個數量級以上時,測量的誤差和噪聲對系統控制穩定性和精度影響不可避免,不過誤差問題并不影響工程上以內模原理思路對相對慣性力矩影響進行消減的有效性。
[1] Menon P K,Sweriduk G D,Ohlmeyer E J,et al.Integrated with guidance and control ofmoving-mass actuated kinetic warheads[J].Journal of Guidance,Control,and Dynamics 2004,27(1):118-126.
[2] Robinett R D,Sturgis B R,Kerr SA.Movingmass trim control for aerospace vehicles[J].Journal of Guidance,Control,and Dynamics,1996,19(5):1064-1070.
[3] Petsopoulos Thomas,Regan Frank J.Moving mass roll control system for fix-tirm reentry vehicle[J].Journal of Spacecraft and Rockets,1996,33(1):54-60.
[4] 周鳳岐,崔利明,周軍.彈道式導彈彈頭變質心機動控制[J].宇航學報,2000,21(s1):107-110.
[5] 郭慶,楊明,王子才.質量矩導彈變質心姿態控制規律研究[J].控制與決策,2008,23(1):19-24.
[6] 高長生,荊武興,李瑞康.提高變質心飛行器可操縱性的方法研究[J].宇航學報,2008,29(6):1773-1777.
[7] 高長生.變質心再入飛行器動力學、控制與制導問題研究[D].哈爾濱:哈爾濱工業大學,2007.