太陽能路燈智能控制系統設計
2012-03-05 07:55:26李麗麗施偉
電源技術 2012年5期
李麗麗,施偉
(遼寧工程技術大學電子與信息工程學院,遼寧阜新123000)
隨著社會的迅速發展,可再生能源消耗逐步加劇,能源燃燒造成的空氣污染也是越來越嚴重,為了維持人類的可持續發展,利用可再生清潔能源已經成為現今人類的重要任務[1]。太陽能作為一種可再生的無污染能源自然成為了新時代能源的“新寵”,太陽能是一種“取之不盡,用之不竭”的安全、環保的新能源,也是人類可以自由利用的能源。太陽能路燈集成了太陽能光伏發電與LED固態照明兩種技術的優點,將新一代能源和新一代光源良好的結合[2-3]。與傳統照明工具相比,太陽能路燈不需要設置輸電線路和鋪設電纜,也不需專人管理和控制,太陽能路燈僅需一次性投入,且維護成本低,短期即可收回投資成本,受益長久。太陽能路燈不存在安全隱患,綠色環保。
1 設計方案
通過對現今已有的LED路燈與傳統路燈數據的對比,結合太陽能路燈的自身特性,本設計需要實現的功能總結如下:
(1)電池板功率的計算與選用;
(2)自動跟蹤太陽角度;
(3)蓄電池容量,充放電的控制與充放電狀態顯示;
(4)連續陰雨三天時,路燈仍能照明;
(5)光線暗時,燈能自動點亮,為節約電能晚上24點時熄滅,早上五點路燈自動點亮,早上光線強時自動熄滅。
太陽能路燈控制器常用的有:單獨光控制型、時鐘控制型和經緯控制器型等,由于各自的工作原理不同,各有其優缺點。本文結合以上幾種控制方式的優點,綜合考慮節電、經濟和實用等問題,將定時控制和光敏電阻控制方式相結合,來實現太陽能路燈的設計。
2 系統設計
2.1 系統總體結構
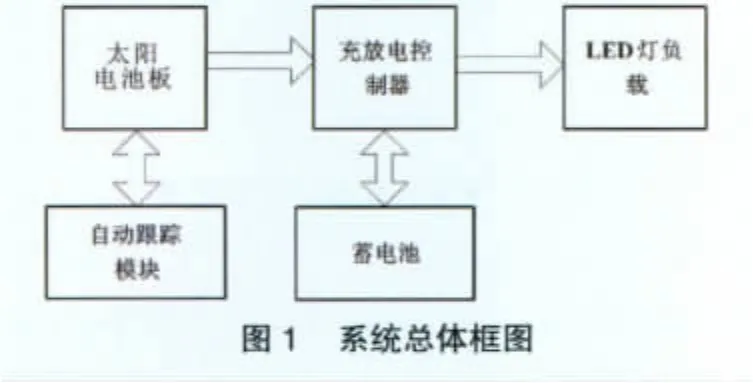
在白天,太陽能路燈通過太陽電池組件采集太陽光能量,將其轉化為電能并儲存起來,即給蓄電池充電;晚上光線較暗時,蓄電池由路燈控制處理器控制,點亮路燈實現照明。根據各部分電路的不同功能,整體電路可分為以下幾部分:太陽電池板組件、過充過放電控制電路、自動跟蹤裝置、單片機、蓄電池、時空光控電路、照明負載與時間顯示電路等,系統總體框圖如圖1所示。太陽電池板通過穩壓電路給單片機供電,同時為蓄電池充電,當蓄電池電壓較低時,其容量損耗將很快,使用的壽命也會變短,為了延長蓄電池的使用壽命,就要防止蓄電池出現過充或過放,因此在整個設計過程中需要過充過放的控制電路。
2.2 系統基本組成和設備選擇
系統由太陽電池組件(包括支架)、控制器、LED燈頭、蓄電池和燈桿等幾部分組成,太陽電池板工作效率較高,是太陽能路燈的核心部分,更是太陽能路燈系統價值最高的部件。太陽電池板將太陽的輻射能轉換為電能,并送至蓄電池中將其存儲下來,對系統的抗風設計非常有利。太陽能LED燈是利用太陽電池組件實現發電,蓄電池儲電,通過控制蓄電池的充放電工作。太陽能控制器主要功能是保護蓄電池,其必須具備過充保護、過放保護、光控、時控和防反接等基本功能。太陽能蓄電池組是太陽電池方陣的儲能設備,主要作用是將方陣在日照多時發出的多余電能儲存起來,在夜晚或陰雨天時供負載使用。
2.2.1 太陽電池組件
為使太陽電池組件一年中接受的太陽輻射能量盡可能的多,就要為太陽電池組件選擇一個最佳的傾角,傾角可以通過Hay模型來計算,通過計算可以獲得不同傾角平面的月平均太陽輻射量的變化情況。太陽電池板的傾角是指太陽電池板平面與水平面的夾角。通過查詢遼寧省阜新市的維度為41.77度,最佳傾角41.77+1=42.77度,年平均日照時間是4.6小時。在不同角度傾斜面上,太陽的輻照量差別較大,要為電池板選擇合適的傾角才能使其獲得最大的太陽輻照量。根據資料分析,設計系統默認初始傾斜角為50度。
太陽電池板主要有單晶硅和多晶硅兩種,多晶硅面積較大,但發電效率沒有單晶硅高,設計采用單晶硅太陽電池組件。
2.2.2 蓄電池和太陽能板
蓄電池用于給路燈供電,本設計的路燈工作電壓為24 V,工作電流約1.2 A。由于路燈一天需要工作8個小時左右,考慮連續陰天3天情況下的系統供電,后備電源必須具有24 h的供電能力,且按80%的放電率進行計算,則蓄電池容量可通過公式(1)計算。

式中:Qx為蓄電池容量;Tx為蓄電池放電時間;Is為設備工作電流;
計算可知應選用24 V/36 Ah免維護蓄電池。
有日照時,需要太陽能板為蓄電池充電,每天有效充電時間為8 h,兩天充滿,可計算出太陽能板輸出的功率,如式(2):

式中:Qx為蓄電池容量;D為充滿電需要的天數;Qs為日耗蓄電池容量;Vg為設備工作電壓;Tc為充電滿電所用時間。
通過計算可知太陽能板應選擇24 V/70W。
2.2.3 照明負載
本設計采用高亮LED管作為系統的照明負載,其正常工作電壓3.3 V,共選用28個1W高亮管,每7個高亮管串聯為一組,共四組并聯在電路中,這樣可以減少當電路中的某一個高亮管出現故障對其他高亮管的影響,由于高亮管的直射效果較好,因此燈具的體積要盡量小一些,這樣可以增大高亮管的照射范圍,應盡量選擇照射角度大的高亮管。
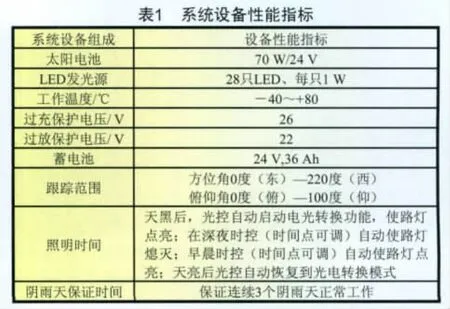
2.3 系統設備性能指標
通過2.2節的介紹,本系統的設備性能指標如表1。
3 詳細設計
3.1 硬件系統詳細設計
3.1.1 MCU
本系統采用AT89S52單片機作為整個系統的控制核心。AT89S52是一種低功耗、高性能8位微控制器,具有8K在系統中可編程Flash存儲器。使用Atmel公司的高密度、非易失性存儲器技術制造,且與工業80C51產品的指令和引腳完全兼容。片上Flash允許程序存儲器在系統可編程,亦適用于常規編程器。在單芯片上,具有靈巧的8位CPU與在系統可編程Flash,這使得AT89S52在眾多的嵌入式控制系統中得到廣泛應用。
3.1.2 電源電路
電源電路如圖2所示。系統太陽能供電,24 V蓄電池電壓經過7805穩壓后產生5 V電壓,作為控制器的主電源。電容C2、C3作為高頻旁路電容,將高頻信號旁路到地[4]。同樣的電容C1、C4為濾波電容。
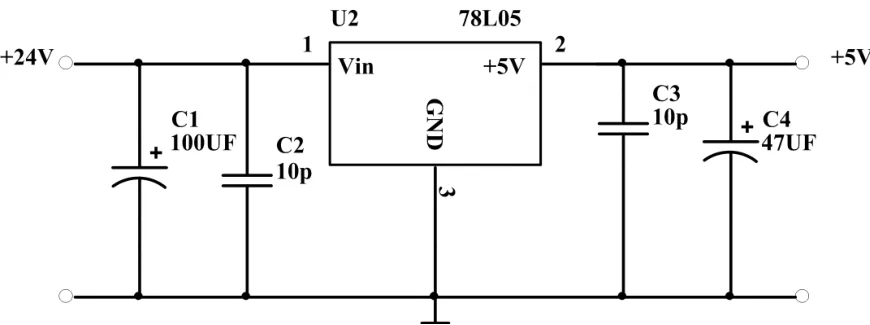
圖2 電源電路
3.1.3 顯示電路
本設計電路采用單片機串口顯示,由74LS164作為數碼管驅動電路,二極管D1、D2和D3承擔降壓、保護數碼管的作用,數碼管選用四位,前兩位顯示小時,后兩位顯示分鐘內容,顯示電路如圖3。STC12C2051單片機的串行口RXD,TXD作為一個全雙工串行通信口,在工作方式0下可作同步移位寄存器使用,其數據由RXD(P3.0)端串行輸出或輸入;同步移位時鐘由TXD(P3.1)端串行輸出,在同步時鐘的作用下,實現由串行到并行的數據通信。由于74LS164在低電平輸出時允許電流達到8mA,因此不必添加驅動電路,亮度也較為理想。
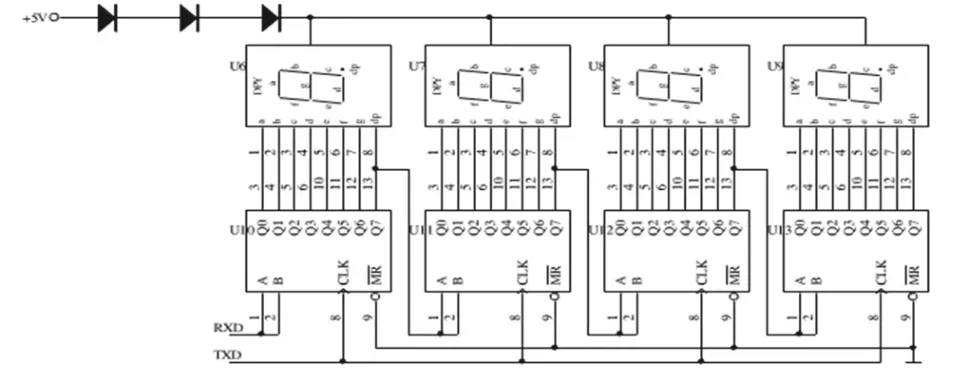
圖3 顯示電路
3.1.4 過充、過放控制電路
過充控制,即在蓄電池處于過充狀態時能夠斷開充電電路,過放控制電路就是當蓄電池處于過放狀態時可以斷開放電電路[5-6]。過充、過放控制目的都是為了保護蓄電池,過充控制電路中將繼電器J1的開關串聯在充電電路中,在白天太陽光充足處于正常充電狀態時,由太陽能板吸收熱并經繼電器開關常閉點向蓄電池充電,當蓄電池電壓高于26 V時,認為蓄電池處于過充狀態,U1A“-”端電壓高于“+”端電壓時U1A輸出“-”,低電平,使Q1截止,同時Q2導通,繼電器線圈J1通電,則繼電器常閉點斷開,常開點閉合,充電電路斷開,過充指示燈亮,即停止向蓄電池充電,達到過充保護的功能。
過放控制電路中,將繼電器J2的開關串聯在放電電路中,在正常放電狀態時,放電電路正常工作。當晚上由蓄電池向負載供電時,蓄電池的電壓低于22 V時,認為蓄電池處于過放狀態,此時U1B“+”端電壓低于其“-”端電壓時,U1B輸出“-”低電平,使Q3截止,同時Q4導通,繼電器線圈J2通電,繼電器開關由常閉點轉到常開點,放電電路斷開,過放指示燈亮,停止向負載供電,實現過放保護的功能。
3.1.5 太陽自動跟蹤電路
自動跟蹤模塊的控制部分采用光敏電阻光強比較的控制方式[7-8]。在跟蹤電路的設計中,對光敏電阻的結構設置進行了改進優化,使數據采集部分能夠及時地反應出太陽光線較小或較大的變化。通過在太陽光接收器上安置一個圓筒作為阻擋物,并在圓筒內外四個方向分別放置光敏電阻,構成的傳感器安置在與電池板同一平面,通過光敏電阻輸出來調整太陽能板的角度。單路光敏電阻的采集電路如圖4所示。
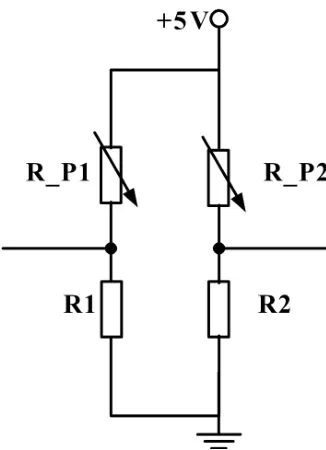
圖4 單路光敏電阻采集電路
3.2 軟件系統詳細設計
系統的軟件采用Keil C編制,主要由主程序、時間設定子程序、1302的讀寫子程序、24C02的讀寫子程序、時間比較子程序、按鍵子程序、顯示刷新子程序等組成。程序開始進行初始化,調用24C02內部存儲的開關路燈時間點,程序每間隔一段時間調用一次1302中的時間。通過程序將設定的時間與系統當前時間進行比較,設定比較的間隔為1秒一次,當時間相同時,通過程序輸出控制信號,來對驅動電路進行驅動。程序整體設計流程見圖5。

圖5 程序整體流程圖
4 系統測試
系統設計完成后,對自動跟蹤和充放電控制兩個主要的功能模塊進行了系統測試,具體測試過程如下。
4.1 自動跟蹤模塊測試
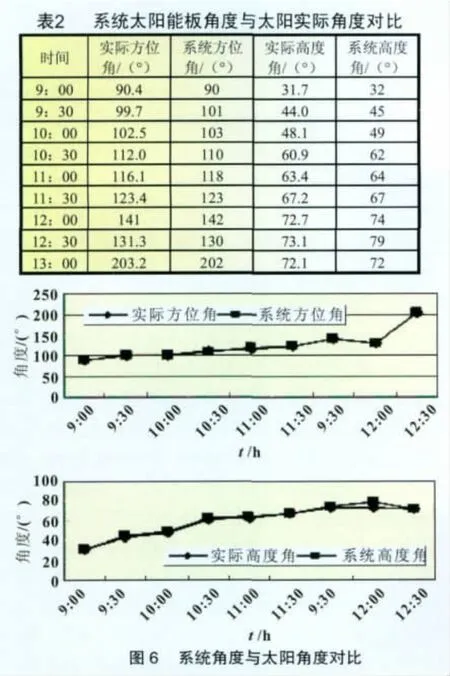
根據遼寧省阜新市(東經122度,北緯42.1度),2011年7月9日上午9點至下午1點,以半小時為單位,系統對太陽高度和方位跟蹤進行測試。具體測試方案如下:
(1)設置初始位置和初始時間;
(2)步進電機每次最小轉動1度;
(3)記錄每次步進電機轉動的角度;
(4)對比系統偏轉角度和太陽實際角度。
測量及對比結果如表2和圖6所示。通過以上測試,驗證了本系統能夠精確跟蹤各種情況下的太陽光方向和高度變化,調節太陽能板對太陽方位角和高度角進行跟蹤,調節精度與實際角度誤差范圍在2度以內。
4.2 過充過放模塊測試
于2011年7月5日至7月8日,在遼寧工程技術大學阜新校區新華樓樓頂采用太陽電池板串聯2節蓄電池同時外接一個100W燈泡進行過充過放模塊的聯合測試:
(1)太陽電池板電壓和蓄電池電壓保持線性關系,且略高于蓄電池電壓。
(2)白天蓄電池充電電壓始終保持在24.3~25.8 V之間,達到25.8 V系統自動停止充電且過充保護燈閃爍,證明蓄電池過充控制正常。
(3)黑夜100W燈泡點亮,蓄電池放電電壓維持在25.4~22.3 V之間,當蓄電池電量低于22.3 V時燈泡自動熄滅,證明過放控制正常。
5 結論
本文通過對太陽能路燈智能控制系統的設計和測試取得成果如下:
(1)設計太陽能跟蹤模塊,實現太陽能板對太陽光線的跟蹤誤差小于2度。達到實時、精確最大限度地吸收太陽能的效果。
(2)使用了光控和時控相結合的方法,避免了光控方法易受干擾、時控方法需要頻繁設置時間的麻煩,為達到節約用電目的,在深夜行人較少時路燈根據設置的時間熄滅,早上行人多時根據設置的時間亮燈。
(3)采用了合理的蓄電池充放電策略,實現算法簡單,有效地提高了蓄電池壽命,具有一定參考和推廣應用價值。
[1] 張建坡,張紅艷,王濤,等.光伏系統中最大功率跟蹤算法仿真研究[J].計算機仿真,2010,27(1):266-270.
[2] 陳維,沈輝,丁孔賢,等.太陽能LED路燈照明系統優化設計[J].中山大學學報,2005(11):95-98.
[3] 周昶,馬磊,吳春澤,等.使用超級電容的太陽能路燈系統的仿真研究[J].照明工程學報,2010(6):76-81.
[4] 伊世明,徐貴生,高瑞林.一種智能型太陽能路燈的設計[J].太陽能,2009(2):54-56.
[5] 郭俊釗.太陽能LED路燈充放電控制器的設計[J].應用技術與研究,2009(8):33-34.
[6] 王翥,孫嘉寧.基于雙CPU的路燈集中控制器設計[J].儀表技術與傳感器,2011(1):71-73.
[7] 劉春.基于太陽能的嵌入式路燈控制系統的研究與應用[D].南京:南京航空航天大學,2010.
[8] 呂運朋,李宏超,張為民,等.基于STC單片機的智能LED路燈控制器設計[J].電源技術,2010,134(5):496-498,508.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17